

1.3 Преобразование структурной схемы и расчет передаточной функции для замкнутой и разомкнутой систем
Определим общую передаточную функцию замкнутой и разомкнутой систем. Для этого проведем эквивалентные преобразования с исходной структурной схемой системы (рисунок 4).
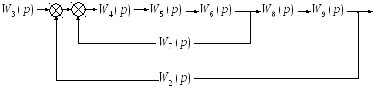
Рис. 4 Исходная структурная схема системы
Звенья 4, 5, 6 соединены последовательно. Обозначим их через W9(p):
![]()
Звенья 9 и 7 соединены встречно – параллельно (отрицательная обратная связь). Обозначим их через W10(p):

Полученное звено 10 соединено последовательно со звеньями 8 и 1. Обозначим их через W11(p):
![]()
Преобразованная структурная схема будет иметь вид (рисунок 5).
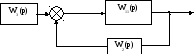
Рис. 5 Преобразованная структурная схема замкнутой системы
Звенья 11 и 2 соединены встречно – параллельно (отрицательная обратная связь). Обозначим их через W12(р):

Звенья 12 и 3 соединены последовательно. Обозначим их через WЗАМ.(р).
![]()
Передаточная функция замкнутой системы равна:
![]()
Определим передаточную функцию разомкнутой системы. Структурная схема разомкнутой схемы представлена на рисунке 6.

Рис. 6 Преобразованная структурная схема разомкнутой системы
Передаточная функция разомкнутой системы WРАЗ(р):
![]()
1.4 Определение устойчивости системы регулирования по критерию Гурвица
Передаточная функция замкнутой системы:
![]()
Выпишем характеристическое уравнение системы:
![]()
Для устойчивости системы необходимо и достаточно, чтобы все миноры определителя Гурвица были положительны. Определитель Гурвица составим по коэффициентам характеристического уравнения.
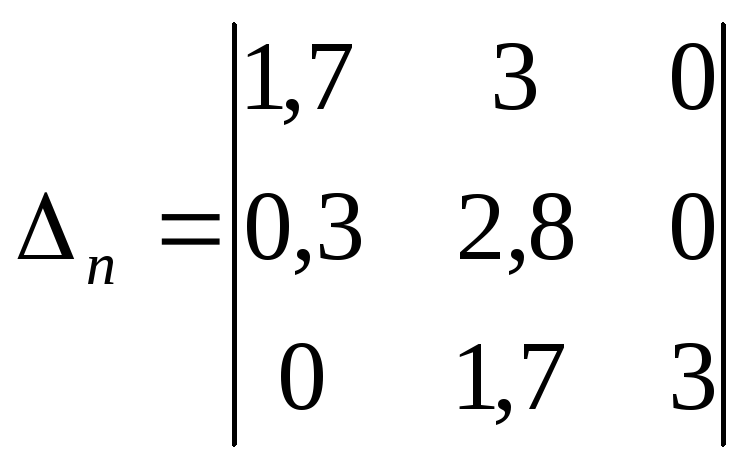
![]()
![]()
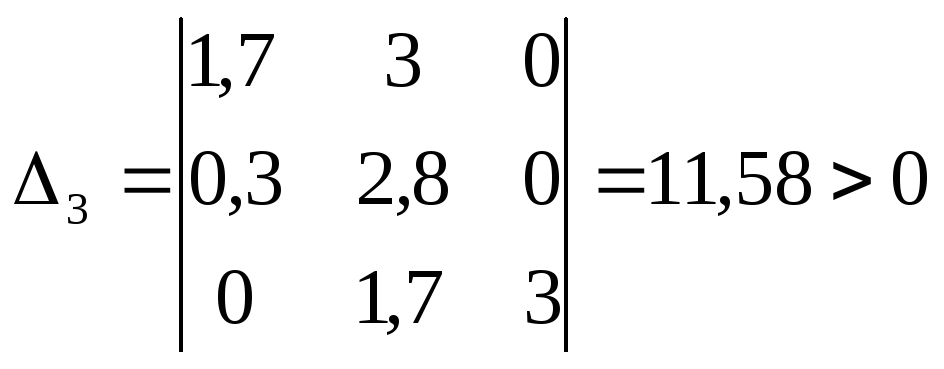
Все миноры определителя Гурвица положительны, следовательно, система устойчива.
1.5 Построение переходного процесса и частотных характеристик системы, определение прямых и косвенных показателей качества системы
Для определения запасов устойчивости, прямых и косвенных оценок необходимо рассчитать и построить ряд различных характеристик (переходная, АЧХ, ЛАЧХ, ЛФЧХ). Для этого воспользуемся прикладными программами MathCad и MathLab.
Передаточная функция замкнутой системы имеет вид:
![]()
Переходная функция h(t):


Рис.7 Переходный процесс системы
Определим графически прямые оценки качества системы.
Время переходного процесса tП – это время регулирования системы. Определяется как интервал от момента приложения какого-либо воздействия на систему до времени вхождения системы 5 % трубу. Определяет быстродействие системы.
tП = 3,8 с.
Перерегулирование δ (максимальная динамическая ошибка):
![]()
Колебательность
n
– число колебаний системы от момента
воздействия на нее до перехода в
установившееся состояние: ![]()
Заменим в передаточной функции замкнутой системы оператор р на jw

![]()
![]()
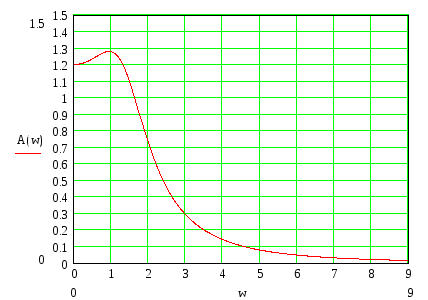
Рис.8 АЧХ системы
Определим косвенные оценки качества системы.
Показатель колебательности:
![]()
Резонансная
частота ωp
– частота, при которой АЧХ достигает
максимальное значение: ![]()
![]()
С учетом прямых и косвенных оценок качества можно сделать вывод, что качество управления высокое.
С помощью логарифмических частотных характеристик исследуется устойчивость замкнутой системы. Построение ЛАЧХ и ЛФЧХ ведется для разомкнутых систем.
Передаточная функция разомкнутой системы:
![]()
Для построения логарифмических амплитудной и фазовой характеристик воспользуемся программой MathLab.

Рис. 9 Логарифмические амплитудная и фазовая характеристики САУ
Запас устойчивости по амплитуде составляет 12,2 децибел.
Запас устойчивости по фазе 57,8 градуса.
Вывод: Анализ линейной системы автоматического регулирования показывает, что при заданных параметрах система устойчива с большими запасами устойчивости по амплитуде и фазе. Система в целом работоспособна.
2 Исследование нелинейной системы автоматического регулирования
2.1 Преобразование нелинейной системы
Структурная схема нелинейной системы управления представлена на рисунке 10. Для построения фазового портрета структурную схему преобразуем так, чтобы нелинейный элемент и линейная часть были соединены последовательно.

Рис. 10 Структурная схема нелинейной системы управления
Преобразуем структурную схему. Получим схему, представленную на рисунке 11.
 u(t)
g(t) x(t) y(t)
u(t)
g(t) x(t) y(t)
Рис. 11 Преобразованная структурная схема нелинейной системы
Передаточная функция линейной части:
![]()
![]()