

Введение
Современная промышленность характеризуется непрерывным повышением производительности машин и агрегатов, повышением качества выпускаемой продукции и снижением ее стоимости. Большие скорости протекания производственных процессов и повышение требований к точности их выдерживания привели к широкому применению систем автоматического регулирования. Система автоматического регулирования должна обеспечивать поддержание на определенном уровне или изменение по заданному закону некоторых переменных характеристик (регулируемых величин) в машинах и агрегатах с помощью различного рода технических средств без участия человека.
Необходимо также добавить, что проведение некоторых технологических процессов возможно только при условии их полной автоматизации, так как малейшее замешательство человека и несвоевременное его воздействие на процесс могут привести к серьёзным последствиям.
Внедрение автоматизации способствует безаварийной работе оборудования, значительно снижает случаи травматизма, предупреждает загрязнение окружающей среды.
1. Исследование линейной системы автоматического регулирования
1.1 Описание выбранной линейной системы автоматического регулирования
В данной работе для исследования мною выбрана система автоматического регулирования давления в емкости с использованием сильфонного манометра и пневмосилового преобразователя.
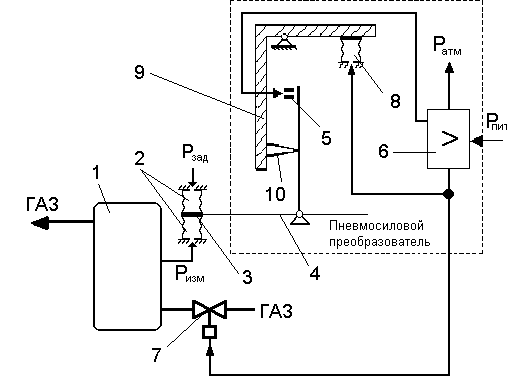
Рис. 1 Принципиальная схема автоматического регулирования давления
1 – технологическая емкость;
2 – сильфонный манометр;
3 – мембрана манометра;
4 – Т - образный рычаг;
5 – узел «сопло-заслонка»;
6 – пневмоусилитель;
7 – регулирующий клапан;
8 – сильфон обратной связи;
9 – Г - образный рычаг;
10 – корректор
Принцип действия основан на изменении силы давления, действующей на мембрану 3, при изменении давления газа. При увеличении давления газа начинает увеличиваться сила, действующая на мембрану 3, нарушается равновесие между давлением Рзад и Ризм. Разность давлений действует на мембрану манометра, которая в свою очередь поворачивает Т - образный рычаг 4 и в результате заслонка 5 пневмосилового преобразователя перемещается. Принцип действия пневмосилового преобразователя основан на силовой компенсации моментов, развиваемых измерительным блоком и блоком обратной связи. Он предназначен для преобразования входного параметра (перемещение заслонки) в пневматический сигнал дистанционной передачи (20 … 100 кПа). Возникший в линии сопла сигнал управляет давлением, поступающим с пневмоусилителя 6 в сильфон обратной связи 8. Сигнал, поступающий в сильфон 8, одновременно является выходным сигналом пневмосилового преобразователя (20 … 100 кПа). Сигнал 20 … 100 кПа поступает на мембранный исполнительный механизм регулирующего клапана 7. Клапан, изменяя проходное сечение трубопровода подачи газа, регулирует давление в емкости.
1.2 Составление структурной схемы выбранной системы автоматического регулирования по принципиальной схеме
Определим элементы функциональной схемы.
Исполнительное устройство (ИУ) – регулирующий клапан 7.
Датчик (Д) – сильфонный манометр 2 со стороны Ризм, который служит для измерения регулируемой величины (давления газа) и преобразования ее в силу, действующую на Т - образный рычаг 4;
Задающее устройство (ЗУ) – сильфонный манометр 2 со стороны Рзад.
Устройство сравнения – мембрана сильфонного манометра 2. Работа устройства сравнения 2 заключается в сравнении двух сигналов от Д и ЗУ (Ризм и Рзад).
Объект регулирования – технологическая емкость 1.
Составим структурную схему регулирования давления в емкости (рисунок 3).
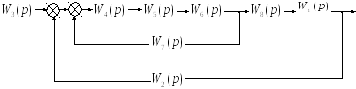
Рис. 3 Структурная схема регулирования давления в емкости
ОР (емкость 1) является апериодическим звеном первого порядка:
![]() ,
,![]() где К1
= 1,5; Т1
= 1,5 c.
где К1
= 1,5; Т1
= 1,5 c.
Датчик (сильфон) является усилительным звеном:
![]() ,
где K2
= 1.
,
где K2
= 1.
Задающее устройство (сильфон) является усилительным звеном:
![]() ,
где K3
= 1.
,
где K3
= 1.
Рычаг 4 является усилительным звеном:
![]() ,
где K4
= 0,2.
,
где K4
= 0,2.
Передаточная функция заслонки имеет вид:
![]() , где K5
= 1; T5
= 0,2 c.
, где K5
= 1; T5
= 0,2 c.
Пневмоусилитель 6 является усилительным звеном:
![]() ,
где K6
= 3.
,
где K6
= 3.
Сильфон 8 является усилительным звеном:
![]() ,
где K7
= 2.
,
где K7
= 2.
Исполнительное устройство 7 (клапан) является апериодическим звеном:
![]() ,
где K8
= 2; T8
= 0,5 c.
,
где K8
= 2; T8
= 0,5 c.
Здесь Ki – коэффициент усиления или передаточный коэффициент звена;
Ti – постоянная времени звена.