

2.4 Вывод
Проведя исследования нескорректированной системы автоматического управления, мы выяснили, что она является устойчивой, и ее качественные показатели соответствуют необходимым. Для исследования системы были использованы критерии устойчивости Гурвица, Найквиста, а также использовались программные продукты Matlab, MatCad, что сильно упростило задачу исследования.
III. Теоретические сведения о исследовании нелинейных элементов сау
Все реальные системы содержат нелинейные элементы. Наиболее часто встречаются нелинейности типа «насыщение» (рис 3.1б) и типа «зона нечувствительности» (рис 3.1а).

Рисунок 3.1 – Характеристики нелинейных элементов
Критерий абсолютной устойчивости в. М. Попова
Как указывалось выше, широкий класс нелинейных САУ может быть сведен к типовой структурной схеме, представляющей собой последовательное соединение нелинейного безынерционного звена и нелинейной части (рис. 4.20).
Под абсолютной
устойчивостью понимают асимптотическую
устойчивость равновесия системы “в
целом” для нелинейностей, принадлежащих
к определенному типу. Наиболее часто
рассматриваются нелинейные характеристики
вида
![]() ,
расположенные внутри угла, образованного
прямыми
,
расположенные внутри угла, образованного
прямыми
![]() и
и![]()
![]() в первом и третьем квадрантах (рис.
4.28). Если положение равновесия абсолютно
устойчиво, то оно является абсолютно
устойчивым и для всех прямолинейных
характеристик
в первом и третьем квадрантах (рис.
4.28). Если положение равновесия абсолютно
устойчиво, то оно является абсолютно
устойчивым и для всех прямолинейных
характеристик![]() ,
где
,
где![]() ,
поскольку эти характеристики также
относятся к рассматриваемому типу.
,
поскольку эти характеристики также
относятся к рассматриваемому типу.
Наиболее просто критерий абсолютной устойчивости формулируется для того случая, когда нелинейность удовлетворяет условию
|
|
(4.41) |
то есть
![]() ,
,![]() .
Будем также предполагать, что линейная
часть системы устойчива, и, следовательно,
передаточная функция
.
Будем также предполагать, что линейная
часть системы устойчива, и, следовательно,
передаточная функция![]() не имеет полюсов в правой комплексной
полуплоскости на мнимой оси. Тогда
абсолютная устойчивость нелинейной
САУ определяется следующей теоремой,
предложенной в 1959 г. в работе румынского
математика В. М. Попова.
не имеет полюсов в правой комплексной
полуплоскости на мнимой оси. Тогда
абсолютная устойчивость нелинейной
САУ определяется следующей теоремой,
предложенной в 1959 г. в работе румынского
математика В. М. Попова.
Теорема.
Если замкнутая система состоит из
устойчивой линейной части с передаточной
функцией
![]() ,
все полюсы которой располагаются в
левой полуплоскости, и нелинейного
элемента с характеристикой
,
все полюсы которой располагаются в
левой полуплоскости, и нелинейного
элемента с характеристикой![]() ,
лежащей в угле
,
лежащей в угле![]() ,
то достаточным условием этой системы
является выполнение при всех
,
то достаточным условием этой системы
является выполнение при всех![]() неравенства
неравенства
|
|
(4.42) |
где q – произвольное вещественное число.
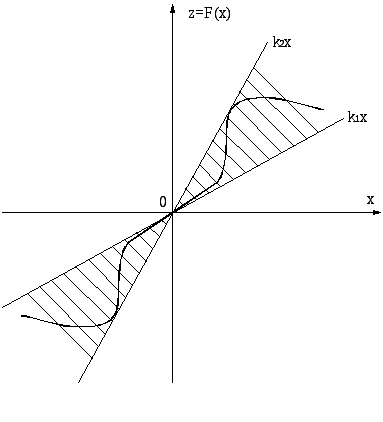
Рис. 4.28
Рассмотрим
геометрическую интерпретацию этой
теоремы. Для этого предварительно введем
видоизмененную частотную характеристику
![]() линейной части, которая связана с
исходной
линейной части, которая связана с
исходной![]() соотношениями
соотношениями
|
|
|
(4.43) |
Обозначив далее
![]() и
и![]() ,
можно переписать неравенство (4.42)
следующим образом:
,
можно переписать неравенство (4.42)
следующим образом:
![]() .
.
откуда получаем окончательно
|
|
(4.44) |
Легко увидеть, что уравнение
|
|
(4.45) |
определяет собой
прямую линию на плоскости
![]() ,
которая проходит через точку с координатами
,
которая проходит через точку с координатами![]() с угловым коэффициентом, равным
с угловым коэффициентом, равным![]() .
Таким образом, исследуемая нелинейная
САУ будет абсолютно устойчива, если на
плоскости видоизмененной частотной
характеристики
.
Таким образом, исследуемая нелинейная
САУ будет абсолютно устойчива, если на
плоскости видоизмененной частотной
характеристики![]() линейной части системы можно провести
прямую через точку
линейной части системы можно провести
прямую через точку![]() так, чтобы
так, чтобы![]() располагалась
справа от этой прямой. Указанную прямую
принято называть прямой Попова.
располагалась
справа от этой прямой. Указанную прямую
принято называть прямой Попова.
На (рис. 4.29, а) показан случай выполнения критерия абсолютной устойчивости, а на (рис. 4.29, б) – случай, когда прямую Попова построить нельзя и судить об устойчивости нелинейной системы не представляется возможным (напомним, что теорема В. М. Попова дает лишь достаточные условия абсолютной устойчивости).
Критерий В. М.
Попова можно распространить и на системы
с неустойчивой или нейтральной линейной
частью, что соответствует наличию у
передаточной функции
![]() правых или чисто мнимых полюсов. При
этом необходимо перейти к видоизмененной
передаточной функции
правых или чисто мнимых полюсов. При
этом необходимо перейти к видоизмененной
передаточной функции![]() ,
где положительный коэффициентr(r<K)
выбирается из условия устойчивости
эквивалентной линейной части с
передаточной функцией
,
где положительный коэффициентr(r<K)
выбирается из условия устойчивости
эквивалентной линейной части с
передаточной функцией
![]() .
.
 а б
а б
Рис. 4.29
Тогда для абсолютной устойчивости нелинейной САУ достаточно потребовать выполнение неравенства
|
|
(4.46) |
для всех ω≥0 и произвольного вещественного числа q; причем нелинейная характеристика должна в данном случае располагаться внутри угла, ограниченного прямыми с угловыми коэффициентами r и K:
|
|
(4.47) |
Критерий В. М.
Попова включает в себя и условия
устойчивости линеаризованной части
системы как частный случай, когда
характеристика z=F(x)
линейна (при этом величину K
следует понимать как граничный коэффициент
усиления соответствующего линейного
безынерционного звена). Условие неохвата
годографом
![]() точки (-1,j0)
совпадает при этом с рассмотренным выше
условием абсолютной устойчивости,
поскольку обе характеристики
точки (-1,j0)
совпадает при этом с рассмотренным выше
условием абсолютной устойчивости,
поскольку обе характеристики
![]() и
и![]() имеют одинаковые вещественные части
и, следовательно, пересекают вещественную
ось комплексной плоскости в одних и тех
же точках.
имеют одинаковые вещественные части
и, следовательно, пересекают вещественную
ось комплексной плоскости в одних и тех
же точках.
Между критерием
абсолютной устойчивости В. М. Попова и
вторым методом А. М. Ляпунова имеется
глубокая взаимосвязь. Показано, в
частности, что если выполняется условие
абсолютной устойчивости (4.42), то существует
функция Ляпунова
![]() вида «квадратичная форма плюс интеграл
от нелинейности», имеющая во всем фазовом
пространстве знакоопределенную
производную
вида «квадратичная форма плюс интеграл
от нелинейности», имеющая во всем фазовом
пространстве знакоопределенную
производную![]() обратного знака с функциейV.
Широкое распространение критерия
абсолютной устойчивости В. М. Попова к
исследованию нелинейных САУ объясняется
его высокой наглядностью, достаточной
простотой и удобством приложения к
практике инженерного проектирования.
обратного знака с функциейV.
Широкое распространение критерия
абсолютной устойчивости В. М. Попова к
исследованию нелинейных САУ объясняется
его высокой наглядностью, достаточной
простотой и удобством приложения к
практике инженерного проектирования.