

Введение
Для успешного синтеза систем управления сложными техническими объектами необходимо иметь информацию об объекте управления. При синтезе линейных САУ чаще всего используется описание в виде передаточных функций. Их можно получить, линеаризуя систему нелинейных дифференциальных уравнений, которая описывает объект. Однако этот процесс трудоемок, и не для всякого объекта эту систему уравнений можно записать. Гораздо проще получить переходную характеристику объекта и по ней построить аппроксимирующую передаточную функцию, и, используя её, произвести синтез САУ. В данной работе представлен как раз такой алгоритм идентификации на основе метода Симою[1].
Разработка и проверка алгоритма идентификации
Блок-схема алгоритма идентификации объекта управления по переходной характеристике представлена на рисунке 1.

Рисунок 1 – Блок схема алгоритма идентификации
Коэффициенты II определяют параметры переходного процесса и вычисляются как:
![]()
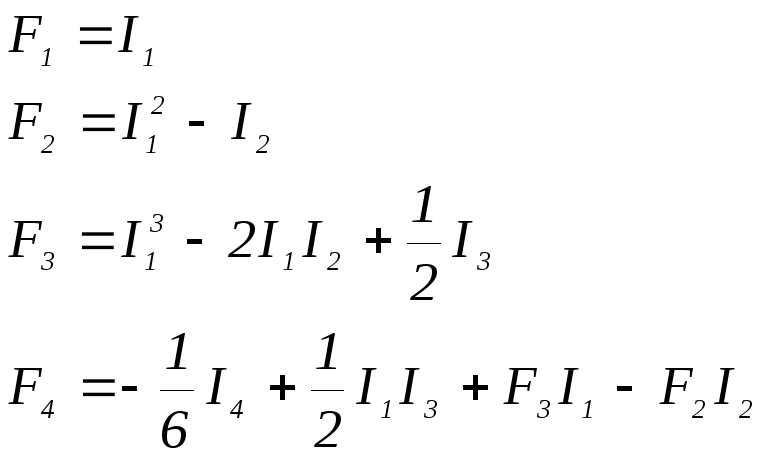
(1.1)
а коэффициенты Fi:
(1.2)
Коэффициенты передаточной функции при аппроксимации вида
![]() :
:
b1= - F4/F3; a1=b1+F1; a2=F2+b1F1; a3=F3+b1F2 ; K=hmax (1.3)
Здесь =h/hmax.
Для проверки данного алгоритма была использована переходная функция для объекта с передаточной функцией
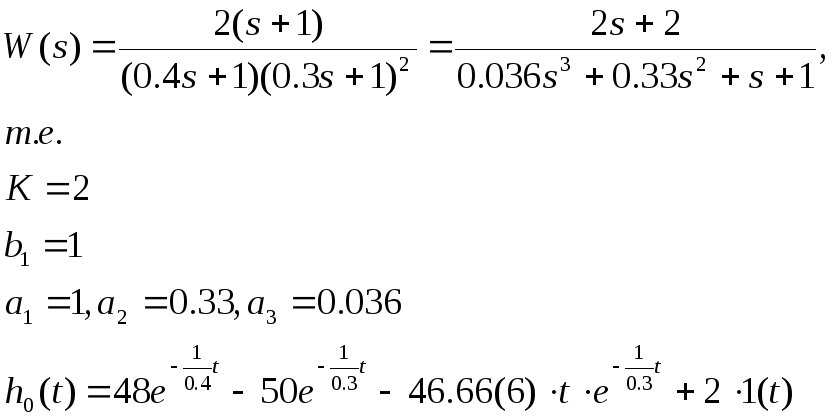
результаты применения алгоритма при h=h0(t)
b1=1 a1=1 a2=0.33, a3=0.036, K=2

результаты применения алгоритма при h=h0(t)+1(t), где 1(t)=random(0.05*K)
b1 = 0.9912, a1 = 0.9889, a2 = 0.3314, a3 = 0.0325 K=2.033

Результаты применения алгоритма при h=h0(t)+2(t), где 2(t)=random(0.1*K)
b1= 0.6991, a1=0.8227, a2=0.2566 a3=0.0339, K=2.1160

Из полученных результатов проверки следует, что аппроксимирующая передаточная функция весьма близка к оригиналу, однако с повышением уровня помехи эта близость снижается, хотя переходная функция аппроксимируется близко. Кроме того, возникали случаи, когда процесс расчета становился неустойчивым и коэффициенты аппроксимирующей функции получались отрицательными.
Синтез сау
Для синтеза САУ необходимо с помощью разработанного алгоритма получить W(s) по переходной характеристике
h(t)=0.15-0.225e-1.5t+0.075e-4t+0.01
В результате применения алгоритма получим:
b1=0.2595
a3=0
a2=0.3281
a1=1.0331
K=0.1488
![]()
Синтез корректирующего устройства произведем с помощью метода стандартных коэффициентов. Выберем желаемую передаточную функцию Ф*(s):
п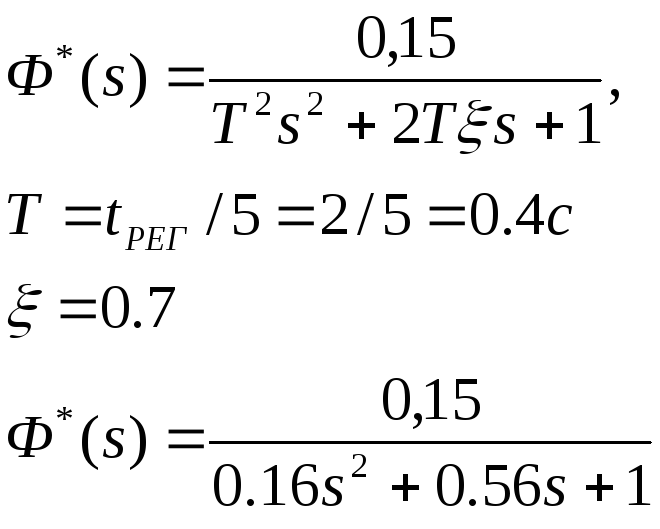 ередаточная
функция корректирующего устройства
определяется
ередаточная
функция корректирующего устройства
определяется
 полученная
структура корректирующего устройства
слишком сложна, поэтому можно ее немного
упростить(справедливость упрощения
проверим потом на ЭВМ)
полученная
структура корректирующего устройства
слишком сложна, поэтому можно ее немного
упростить(справедливость упрощения
проверим потом на ЭВМ)
![]()

3 Моделирование сау на эвм
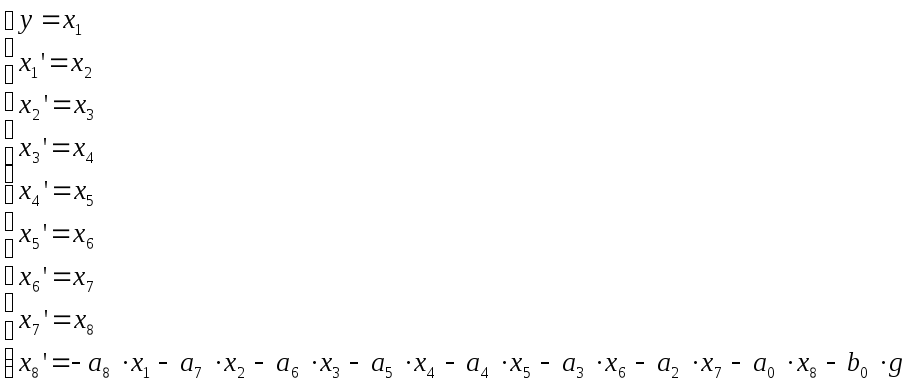
Для моделирования САУ на ЭВМ необходимо получить передаточные функции замкнутой системы по координатам x(t) и u(t).
по координате x(t):
![]()
Представление в нормальной форме Коши:

Запишем переменные состояния в матричной форме
A:
|
|
X1 |
X2 |
X3 |
X4 |
X5 |
X6 |
X7 |
X8 |
|
X1 |
0 |
1 |
0 |
0 |
0 |
0 |
0 |
0 |
|
X2 |
0 |
0 |
1 |
0 |
0 |
0 |
0 |
0 |
|
X3 |
0 |
0 |
0 |
1 |
0 |
0 |
0 |
0 |
|
X4 |
0 |
0 |
0 |
0 |
1 |
0 |
0 |
0 |
|
X5 |
0 |
0 |
0 |
0 |
0 |
1 |
0 |
0 |
|
X6 |
0 |
0 |
0 |
0 |
0 |
0 |
1 |
0 |
|
X7 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
1 |
|
X8 |
-1155 |
-3130 |
-3952 |
-3014 |
-1522 |
-523.6 |
-120.7 |
-16.87 |
B:
|
X1 |
173.3 |
|
X2 |
372.6 |
|
X3 |
356.6 |
|
X4 |
192.8 |
|
X5 |
63.27 |
|
X6 |
10.92 |
|
X7 |
0.7114 |
C:
|
|
X1 |
X2 |
X3 |
X4 |
X5 |
X6 |
X7 |
X8 |
|
Y1 |
1 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
по координате u(t):
![]()
Представление в нормальной форме Коши:
Запишем переменные состояния в матричной форме
A:
|
|
X1 |
X2 |
X3 |
X4 |
X5 |
X6 |
X7 |
X8 |
|
X1 |
0 |
1 |
0 |
0 |
0 |
0 |
0 |
0 |
|
X2 |
0 |
0 |
1 |
0 |
0 |
0 |
0 |
0 |
|
X3 |
0 |
0 |
0 |
1 |
0 |
0 |
0 |
0 |
|
X4 |
0 |
0 |
0 |
0 |
1 |
0 |
0 |
0 |
|
X5 |
0 |
0 |
0 |
0 |
0 |
1 |
0 |
0 |
|
X6 |
0 |
0 |
0 |
0 |
0 |
0 |
1 |
0 |
|
X7 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
1 |
|
X8 |
-1155 |
-3130 |
-3952 |
-3014 |
-1522 |
-523.6 |
-120.7 |
-16.87 |
B:
|
X1 |
1155 |
|
X2 |
3373 |
|
X3 |
4440 |
|
X4 |
3399 |
|
X5 |
1646 |
|
X6 |
503.4 |
|
X7 |
88.06 |
|
X8 |
6.02 |
C:
|
|
X1 |
X2 |
X3 |
X4 |
X5 |
X6 |
X7 |
X8 |
|
Y1 |
1 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
График, полученный на программе расчета (BP7.0).
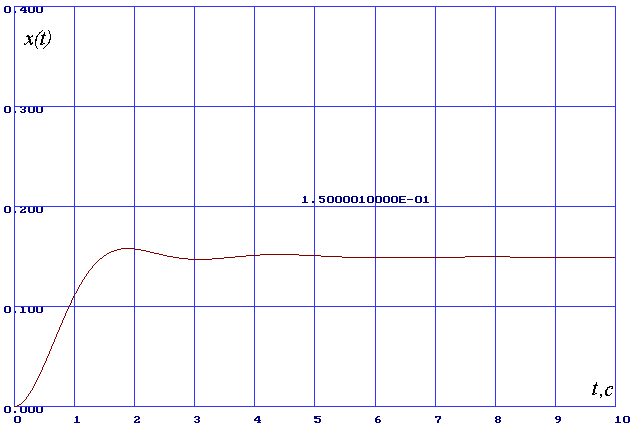
X=6%
tрег=1,4с
=0
график, полученный путем моделирования готовой структурной схемы на MATLAB’e:
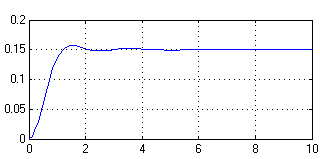
Требования к качеству САУ выполнены.

U=55%
tРЕГ=4 c
