

лекции / lekcii_kompyuternoe_upravlenie / КУ_Л_10
.DOCЛЕКЦИЯ №10
ЧАСТОТНЫЕ СВОЙСТВА ИМПУЛЬСНЫХ СИСТЕМ
План лекции:
-
Преобразование спектра непрерывного гармонического сигнала импульсным элементом.
-
Частотное представление решетчатой функции.
-
Прохождение непрерывного гармонического сигнала через дискретно-непрерывную цепь
10.1 Преобразование спектра непрерывного гармонического сигнала импульсным элементом
Рассмотрим прохождение гармонического сигнала через дискретную систему Напомним, что в непрерывном случае, входному гармоническому сигналу соответствует входной гармонический сигнал той же частоты, те качественного изменения спектра не происходит
Дискретная система в отличие от непрерывной изменяет спектр входного сигнала, вводит в него дополнительные составляющие
Для
иллюстрации сказанного рассмотрим
простейший пример:
Определим реакцию дискретной системы
с ПФ:
![]() на гармонический входной сигнал
f=cos0907t.
Такую ПФ имеет система, структурная
схема которой представлена на рис.10.1.
на гармонический входной сигнал
f=cos0907t.
Такую ПФ имеет система, структурная
схема которой представлена на рис.10.1.

![]()

f f* y(t)




Рис.10.1.
Параметры
системы:
![]() ,
интервал квантования 0,693.
,
интервал квантования 0,693.
На периоде входного сигнала укладывается 10 таких интервалов
![]() ;
;
 ;
;
![]() ;
;
![]() ;
Т1=1;
;
Т1=1;
Для рассматриваемой z-ПФ ранее были построены частотные характеристики и мы их используем сейчас для определения реакции на дискретный сигнал
![]()
Получим:
![]()
![]()
Выходной сигнал, рассматриваемый в моменты квантования, будет иметь вид:
![]()
Полученная формула определяет реакцию системы лишь в дискретные моменты времени, а нас интересует вид всего выходного процесса при произвольном аргументе t
Для построения графика установившегося процесса будем действовать в такой последовательности:
-
Из последней формулы найдем начальное значение
![]() ,
соответствующее искомому процессу
,
соответствующее искомому процессу
2)
На интервале
![]() ,
,
![]() и выходная величина в соответствии с
известными зависимостями для
апериодического звена определится
выражением:
и выходная величина в соответствии с
известными зависимостями для
апериодического звена определится
выражением:
![]() ,
при этом
,
при этом
![]()
3)В момент t=T на вход непрерывной части действует -функция:
![]()
Она
вызывает скачок выходной переменной
![]() ,
при этом:
,
при этом:
![]() .
.
В
дальнейшем, при
![]() процесс вычисления выходной переменной
аналогичен описанному в п2
и 3
Во внутренних точках каждого интервала
квантования входной сигнал описывается
зависимостью:
процесс вычисления выходной переменной
аналогичен описанному в п2
и 3
Во внутренних точках каждого интервала
квантования входной сигнал описывается
зависимостью:
![]() ,
,
а
в точках
![]() ,
,
![]() сигнал терпит разрыв и при этом
сигнал терпит разрыв и при этом
![]()
Таким образом, строится график установившегося процесса (рис.10.2).
Из рисунка видно, что решетчатая функция y[nT], рассматриваемая в дискретные моменты квантования, является гармонической Тем не менее, сам процесс гармоническим не является, те дискретная система изменяет спектр входного сигнала
Причина
такого изменения с формальной точки
зрения становится понятной, если
вспомнить связь между изображением
решетчатой функции f[nT]
и преобразованием Лапласа исходной
непрерывной функции f(t)
Эта связь задается известной формулой
![]() -
преобразования:
-
преобразования:
![]() .
.
Р ис.10.2.
ис.10.2.
Из этой зависимости непосредственно следует, что если
![]() ,
,
то
![]() (10.1)
(10.1)
те процесс квантования сопровождается возникновением бесконечного множества дополнительных гармонических составляющих, каждая из которых далее преобразуется непрерывной частью системы
10.2 Частотное представление решетчатой функции

 Пусть
теперь f(t)
– некоторая непрерывная преобразуемая
по Фурье функция.
F(j)
Пусть
теперь f(t)
– некоторая непрерывная преобразуемая
по Фурье функция.
F(j)
Прямое и обратное преобразование Фурье
для этой функции имеет вид (рис.10.3):
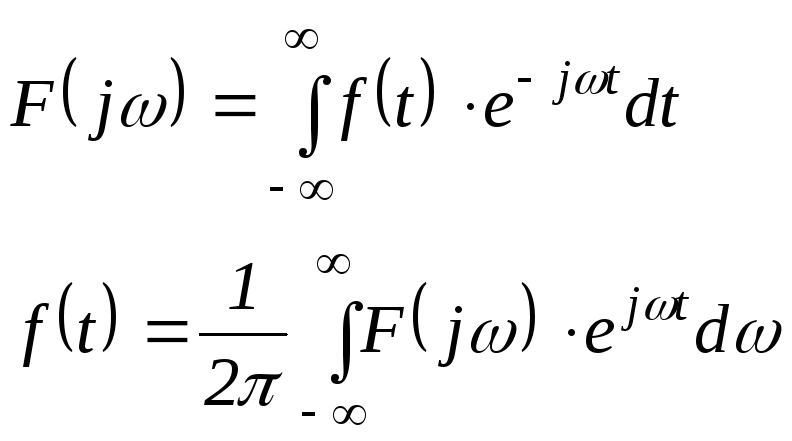

Рис.10.3.
Допустим, при этом, что спектральная характеристика указанного непрерывного сигнала имеет вид, представленный на рис.10.4.
Рассмотрим спектр соответствующей решетчатой функции
В
соответствии с формулой
![]() - преобразования он определяется
зависимостью:
- преобразования он определяется
зависимостью:
![]() (10.2)
(10.2)
где
![]() - частота квантования
- частота квантования
Как
видно из (10.2) частотный спектр
![]() включает спектр входной величины
(основной спектр) и боковые (дополнительные)
спектры, смещенные по оси частот на
величины, кратные
включает спектр входной величины
(основной спектр) и боковые (дополнительные)
спектры, смещенные по оси частот на
величины, кратные
![]()
При этом дополнительные спектры идентичны
основному (рис.10.4)
При этом дополнительные спектры идентичны
основному (рис.10.4)















![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
Рис.10.4
Полезная информация о входном сигнале содержится лишь в основном спектре и может быть восстановлена фильтрацией нежелательных составляющих, если дополнительные спектры не перекрываются с основным Это возможно, если входной сигнал не содержит составляющих, частота которых больше половины частоты квантования
![]() (10.3)
(10.3)
где
![]() - максимальная частота спектра
- максимальная частота спектра
![]()
Это утверждение находится в согласии с теоремой Котельникова об эквивалентности непрерывного и дискретного сигналов
Напомним теорему:
Полное восстановление непрерывного сигнала по его импульсной последовательности возможно, если частота повторения импульсов по крайней мере в два раза больше максимальной частоты спектра этого сигнала
В случае нарушения условий теоремы основной и дополнительный спектры перекрываются и полезная информация не может быть извлечена из импульсного сигнала
В импульсных системах функцию фильтра низких частот в основном выполняют элементы самой системы, находящиеся в цепи импульсного элемента Для достижения лучшего эффекта фильтрации на выходе ИЭ могут включаться дополнительные сглаживающие фильтры
При этом с уменьшением частоты квантования обеспечить качественную фильтрацию становится все труднее При увеличении же частоты импульсов проблема фильтрации отпадает, так как в этом случае импульсная система приближается к непрерывной
Выбор компромиссного решения, обеспечивающего качественную фильтрацию и приемлемые процессы, составляет один из основных моментов при расчете импульсных систем
Наиболее простым и часто применяемым низкочастотным фильтром является экстраполятор нулевого порядка При этом решетчатая функция в качестве огибающей имеет ступенчатую функцию Эта огибающая содержит полезную информацию о сигнале на входе ИЭ ПФ экстраполятора нулевого порядка имеет вид:
![]() ;
;
Рассмотрим его АФЧХ:
![]()
![]()
По
известной формуле:
![]() ,
,
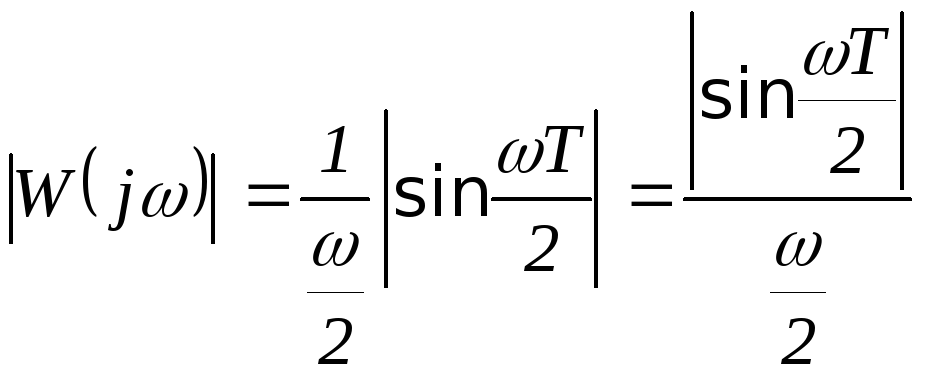
График
![]() представлен на рис.10.5:
представлен на рис.10.5:
Р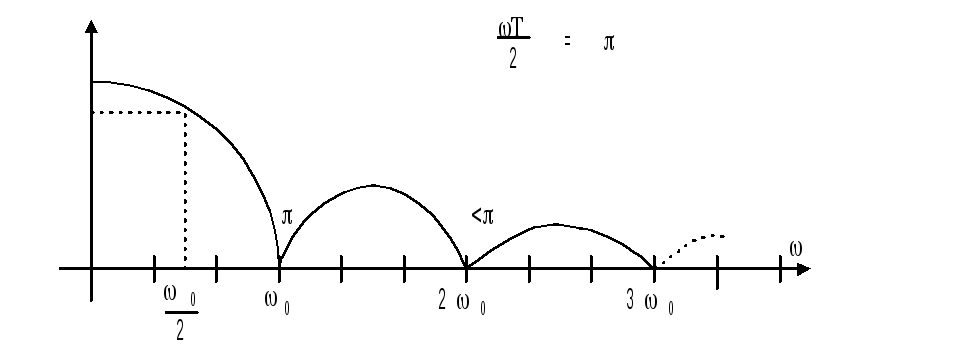 ис.10.5.
ис.10.5.
![]()
Из
анализа приведенного графика, следует,
что экстраполятор будет пропускать
помимо основных составляющих спектра
сигнала![]() еще и боковые составляющие
еще и боковые составляющие
10.3Прохождение непрерывного гармонического сигнала через дискретно-непрерывную цепь
Частотные характеристики дискретной системы не позволяют полностью определить ее реакцию на гармоническое входное воздействиеПри прохождении через ИЭ спектр сигнала изменяется, в нем появляются дополнительные составляющиеЭта особенность может оказать существенное влияние на работу импульсной системы
При
прохождении сигнала
![]() через идеальный ИЭ на выходе будем
иметь:
через идеальный ИЭ на выходе будем
иметь:
![]()
Из формулы (10.3) видно, что при этом возможно либо преобразование сигнала в высокочастотную область (при m>0), либо транспонирование высокочастотного входного сигнала в низкочастотную часть спектра (m<0).
В цифровых системах управления эффект транспонирования колебаний в низкочастотную область может привести к низкочастотным колебаниям на выходе объекта при действии высокочастотной помехи
Снижение величины транспонированных колебаний является важной задачейОбычно для ее решения используется предимпульсная фильтрация, т е фильтрация непрерывного сигнала до входа ИЭ Эффект такой фильтрации заключается в уменьшении амплитуды помехи, попадающей на ИЭВыбором параметров предимпульсного фильтра можно существенно уменьшить транспонированные колебания