

3.7. Оценка качества переходного процесса по управлению
-
установившееся значение.![]()
-максимальное
значение
![]()
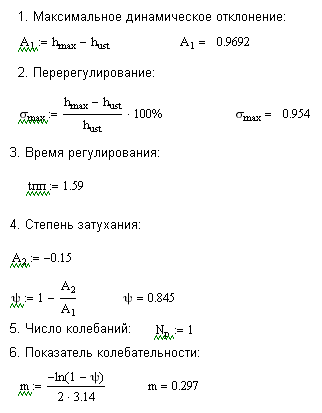
1.
Максимальное
динамическое отклонение:
2.
Перерегулирование:
![]()
![]()
![]()
![]()
3.
Время
регулирования:
![]()
4.
Степень
затухания:
5.
Число колебаний:
6.
Показатель колебательности:
7.
Статическая ошибка (отклонение в
установившемся режиме):
![]()
![]()
![]()
![]()
![]()
![]()
![]()
Сводная таблица расчетных параметров
Показатели |
Обозначение |
Заданные |
Рассчитанные |
Запас по амплитуде, дБ |
La |
20 |
25.22 |
Запас по фазе, о |
Lf |
56 |
54.9 |
Перерегулирование, % |
max |
0,25 |
0,068 |
Время регулирования, с |
tp |
2 |
1,051 |
Число колебаний, шт |
Np |
1 |
1 |
Степень затухания |
|
1 |
1 |
Статическая ошибка |
δ |
0,03 |
0,005 |
Показатель колебательности |
m |
|
∞ |
Максимальное отклонение |
А1 |
|
1.03 |
3.8. Построение переходного процесса в системе электропривода по возмущению
Для построения переходного процесса системы управления электроприводом постоянного тока по возмущению составим структурную схему замкнутой системы:

Рис. 15 Структурная схема замкнутой системы по возмущению.
Составим передаточную функцию замкнутой системы по возмущению:



Рис. 16 Переходная характеристика скорректированной системы по возмущению.
![]()
3.9. Оценка качества переходного процесса по возмущению
Из полученных графиков переходного процесса системы (уже с введенным корректирующим устройством) видно, что мы имеем устойчивый переходный процесс. Время переходного процесса меньше заданного, что удовлетворяет нашим требованиям.
3.10. Выводы по разделу
В результате введения корректирующего устройства были получены показатели качества, анализируя которые, можно сделать выводы о том, что в скорректированной системе запас по амплитуде выше требуемого на 5%, запас по фазе превышает требуемый на 2%, время регулирования меньше требуемого, статическая ошибка скорректированной системы в 6 раз меньше и т.д. Таким образом, скорректированная система обладает хорошими показателями качества-т.е. спроектирована верно, и удовлетворяет заданию.
Корректирующее устройство представляет из себя 4 резистора и 1 конденсатор - достаточно простое, что удешевляет конструкцию, а также упрощает расчет и конструкцию.