

3.Расчет динамики электропривода
В данном разделе рассматривается возможность получения динамических показателей работы спроектированного электропривода, в соответствии с заданными, т.е. строится и анализируется переходный процесс в системе электропривода.
Переходные процессы играют большую роль в работе ЭП и РМ. Характер их протекания предопределяет производительность машины, качество выпускаемой продукции, а также заметно сказывается на режимах работы ЭП. Вид переходного процесса зависит от свойств всех элементов привода и рабочей машины.
3.1. Составление структурной схемы электропривода для расчета динамики.
На основе функциональной схемы можно составить обобщенную структурную схему замкнутой системы электропривода со всеми обратными связями
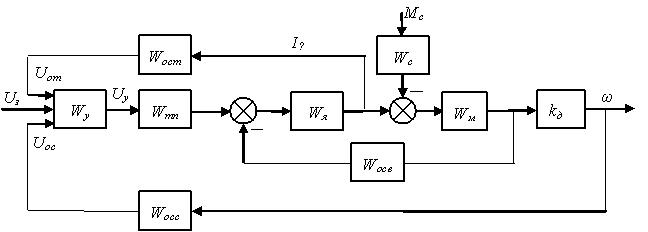
Рис. 5 Обобщенная структурная схема замкнутой системы ЭП.
Ограничимся расчетом динамики системы, не учитывая задержанную обратную связь по току, вследствие ее нелинейности и сложности расчетов. Поэтому обобщенную схему можно представить, как:
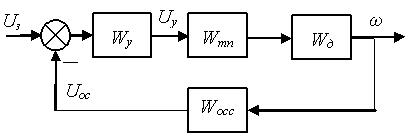
Рис. 6 Упрощенная структурная схема замкнутой системы ЭП.
Упрощенная структурная схема представляет собой упрощенную математическую модель системы.
3.2. Составление передаточных функций элементов.
3.2.1. Составление передаточной функции двигателя постоянного тока.
В![]() соответствии со структурной схемой
тиристорного электропривода постоянного
тока с учетом того, что обратная связь
по току не действует, а момент статической
нагрузки равен нулю, можно составить
передаточную функцию двигателя
постоянного тока независимого возбуждения
в виде:
соответствии со структурной схемой
тиристорного электропривода постоянного
тока с учетом того, что обратная связь
по току не действует, а момент статической
нагрузки равен нулю, можно составить
передаточную функцию двигателя
постоянного тока независимого возбуждения
в виде:
Так как Тмц<4Тяц.
Рассчитываем коэффициенты:
![]() -фиктивная
постоянная времени
-фиктивная
постоянная времени
![]()
![]() -
коэффициент затухания
-
коэффициент затухания
![]()
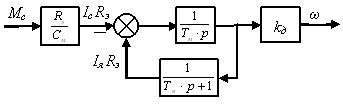
Рис. 7 Структурная схема двигателя по моменту.
На основании упрощенной структурной схемой замкнутой системы электропривода (Uз=const), запишем передаточную функцию двигателя по моменту:
![]()
Рассчитаем коэффициент передачи двигателя по моменту:
![]()
3.2.2. Составление передаточной функции тиристорного преобразователя.
Передаточную функцию тиристорного преобразователя представим в виде:
![]()
Тфтг – постоянная времени датчика скорости (Тфтг =0,004с)
Тфдт – постоянная времени датчика тока
Найдем среднестатистическое запаздывание преобразователя (фазность преобразователя m=6):
Тф – постоянная времени фильтра на входе системы на импульсно-фазового управления (Тф=0,005)
Найдем полную постоянную времени тиристорного преобразователя:
3.2.3. Составление передаточной функции цепи обратной связи по скорости
В общем случае передаточную функцию цепи обратной связи по скорости можно записать:
W(p)=kтгWфтг(p) ,
где коэффициент передачи тахогенератора kтг известен.
Передаточную функцию фильтра представим как:

Вносим поправку в регулируемый коэффициент обратной связи по скорости:
![]()
Тогда передаточную функцию цепи обратной связи по скорости можно записать в виде:
 ,
,
где (Тфтг =0,004 с)
3.3. Составление передаточной функции системы
Имеем структурную схему системы электропривода постоянного тока с тиристорным управляемым выпрямителем (двигатель представлен колебательным звеном):
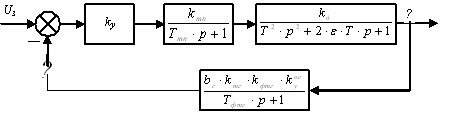
Рис. 8 Расчетная схема электропривода.
Составим передаточную функцию разомкнутой системы:
Wраз(p)= Wу(p)Wтп(p)Wд(p)Wocс(p)
Получим функцию вида:

где
![]() -
-