

3. Методы математического описания объектов управления.
Известно, что лишь при наличии достаточно точной математической модели объекта можно спроектировать высококачественную систему управления этим объектом. Причем, согласно принципу Эшби, сложность управляющего устройства должна быть не ниже сложности объекта управления. Поэтому основной целью построения математической модели объекта управления является определение структуры объекта, его статических и динамических характеристик. Особенно важно определение структуры для многомерных и многосвязных объектов управления. В тоже время для локальных объектов управления определение структуры может быть сведено к определению порядка дифференциального уравнения описывающего объект. Кроме того, оцениваются входные сигналы и возмущения действующие на объект (их статистические характеристики, точки приложения, максимальные амплитуды). Значение этих характеристик позволяет выбрать структуру регулятора и рассчитать параметры его настройки, ориентируясь также на критерий качества работы этой системы. Наряду с динамической частью W(p) в структуре объекта могут содержаться различные запаздывания в сигналах управления, измерения и состояния (рецикла) (Рис. 3).
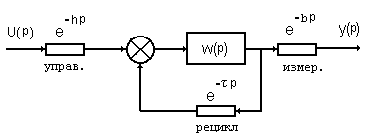 Рис.
3. Объект управления с запаздыванием.
Рис.
3. Объект управления с запаздыванием.
В промышленных объектах под рециклом понимается возврат части продукта с выхода объекта на его вход с целью повторной переработки. Большинство промышленных объектов управления имеют запаздывания. Наличие запаздывания объясняется конечной скоростью распространения потоков информации в технологических объектах (транспортное запаздывание). Наряду с этим при понижении порядка модели объекта вводят дополнительное динамическое запаздывание. Для этого выделяют одну наибольшую постоянную времени, а все остальные малые постоянные времени заменяют звеном динамического запаздывания.
Существуют аналитические, экспериментальные и комбинированные методы получения математического описания объектов управления. Аналитические методы базируются на использовании уравнений описывающих физико-химические и энергетические процессы, протекающие в исследуемом объекте управления. Это, например, законы сохранения вещества и энергии (уравнения материального баланса). В настоящее время для многих классов объектов управления получены их математические модели. В частности для аэрокосмических объектов (ракет, самолетов, вертолетов), для технологических объектов (химические реакторы), для энергетических процессов (ядерные реакторы, паровые турбины, генераторы, двигатели). При получении таких описаний обычно оперируют с дифференциальными уравнениями в частных производных, т.к. переменные изменяются как во времени, так и в пространстве. Экспериментальные методы предполагают проведение серии экспериментов на реальном объекте управления. Обработав результаты экспериментов, оценивают параметры динамической модели объекта, задавшись предварительно ее структурой. Наиболее эффективными оказываются комбинированные методы построения математической модели объекта, когда, используя аналитически полученную структуру объекта, ее параметры определяют в ходе натурных экспериментов.