

1. Общие сведения об объектах управления.
В общем случае термин «объект управления» означает систему (техническую, биологическую, социальную), в которой протекает управляемый процесс.
В качестве материально осязаемых объектов управления могут выступать: деталь, станок, паровой котел, двигатель, автоматическая линия, прокатный стан, доменная печь, корабль, буровая установка, железнодорожная сортировочная точка, производственный участок, служащий и многие другие.
Примерами неосязаемых (абстрактных) объектов управления могут служить название работы, технологического процесса, структурного подразделения, реклама и многие другие.
В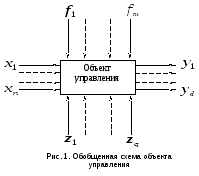 большинстве случаев объект управления
можно представить обобщенной схемой,
изображенной на рис. 1.
большинстве случаев объект управления
можно представить обобщенной схемой,
изображенной на рис. 1.
![]() -
управляющее воздействие, задающее
качественные показатели и количественные
характеристики управляемому процессу.
-
управляющее воздействие, задающее
качественные показатели и количественные
характеристики управляемому процессу.
![]() -
детерминированные и случайные возмущающие
воздействия, нарушающие ход управляемого
процесса в нежелательном направлении.
-
детерминированные и случайные возмущающие
воздействия, нарушающие ход управляемого
процесса в нежелательном направлении.
![]() -
выходная величина системы (управляемая
переменная), желаемое значение или
состояние которой достигается в процессе
управления.
-
выходная величина системы (управляемая
переменная), желаемое значение или
состояние которой достигается в процессе
управления.
Пользуясь методологией системного анализа, объект управления можно рассматривать как систему, в которой необходимо управлять энергетическими и (или) информационными потоками, пространственными координатами, количеством и качеством материальных потоков и т.д.
В любом объекте существует определенная функциональная зависимость выходных величин объекта от управляющих и возмущающих воздействий, т.е.
![]()
![]() ,
(1)
,
(1)
где
![]() - оператор управления.
- оператор управления.
Основная
задача управления объектом состоит в
том, чтобы, исходя из цели автоматизации
и физической природы объекта, возможно
точнее определить
![]() и
синтезировать технические средства
для реализации этой цели.
и
синтезировать технические средства
для реализации этой цели.
Наиболее сложной задачей является определение оператора управления, так как это непосредственно связано с получением необходимой априорной (начальной) информации об объекте, т.е. для этого необходимы количественные характеристики и качественные показатели объекта. Для получения таких характеристик объекта проводится их математическое описание (идентификация) и классификация. Необходимо отметить, что по некоторым вопросам классификации и идентификации объектов пока нет общепринятых концепций и установившейся терминологии, поэтому в дальнейшем придерживаются методологии системного подхода, получившего развитии в АСУ ТП.
2. Классификация промышленных объектов управления
По характеру протекания технологических процессов объекты управления делятся на циклические, непрерывно-циклические и непрерывные. Локальные системы наиболее широко применяются для управления объектами второго и третьего типов. По характеру установившегося значения выходной величины объекта при действии на его вход ступенчатого сигнала выделяют объекты с самовыравниванием и без самовыравнивания. По количеству входных и выходных величин и их взаимосвязи объекты делятся на одномерные (один вход и один выход) и многомерные. Последние могут быть многосвязными - когда наблюдается взаимное влияние каналов регулирования друг на друга, либо несвязные - взаимосвязь между каналами которых мала.
К многомерным системам могут быть отнесены энергосистемы, ректификационные колонны в нефтехимической и газовой промышленности и многие другие. Не будет преувеличением утверждение, что теория многосвязанного регулирования является теоретической основой при автоматизации многих производственных и технологических процессов.
Примерами объектов многосвязанного регулирования могут служить: паровой котел, где регулируемыми величинами являются температура, давление пара и уровень воды; турбореактивный двигатель, в котором регулируются скорость вращения и температура газа на выходе турбины. В данных примерах корреляция (взаимовлияние) между отдельными регулируемыми величинами обусловлена естественными (внутренними) свойствами объектов. Более сложная задача многосвязанного регулирования возникает при автоматизации производственных процессов. Взаимовлияние между отдельными регулируемыми величинами в этой группе, как правило, обусловлено технологическими факторами. Примером здесь могут служить системы автоматического управления частотой вращения электроприводов валков и зазором между ними в станах холодной и горячей прокатки. Обе эти системы управления связаны между собой через прокатываемую полосу, образую сложную многосвязанную систему.
Внешние связи объектов со средой могут иметь различную физическую природу, обусловленную внутренней структурой объекта. Причем связи могут быть односторонними и двусторонними. Для подавляющего большинства реальных объектов характерны двусторонние информационно-энергетические связи или информационные связи с материальными потоками, так как в процессе любого управления объектом необходим информационный обмен между устройством управления и объектом для управления энергетическими или материальными потоками в самом объекте. Внутренняя структура объектов раскрывается при изучении этих элементов и описывающих эти элементы количественных соотношений.
По типу параметров объекты делятся на объекты с сосредоточенными и с распределенными параметрами. Большинство технологических объектов имеют распределенные параметры (теплообменные агрегаты, теплоэнергетические установки, аппараты химической промышленности и другие). Однако для целей более простого математического описания распределенностью их параметров иногда пренебрегают и рассматривают приближенно, как объекты с сосредоточенными параметрами. Данный подход справедлив далеко не всегда, так как есть группа объектов, которые всегда необходимо рассматривать как объекты с распределенными параметрами. К таким объектам относятся: железнодорожная сортировочная горка, производственный участок, экологическая система, нефтеносный пласт и другие.
По типу параметров все объекты делятся на стационарные и нестационарные. Условия объектов часто оказываются крайне неблагоприятными: смена окружающей температуры, давления, влажности, колебание питающего напряжения и т.д. Все это приводит к дрейфу параметров объекта (временному, температурному и случайному). Поэтому практически все объекты обладают нестационарными параметрами. Однако если на определенном интервале наблюдения параметры объекта не выходят за пределы допустимых значений, то объект приближенно можно рассматривать со стационарными параметрами. Интервал наблюдения и допустимые значения отклонения параметров определяются конкретными условиями, исходя из целей автоматизации.
За основу классификации могут быть взяты количественные отношения между элементами объекта и между объектом и внешней средой, описываемые различными уравнениями (алгебраическими, дифференциальными и т.д.), позволяющие проводить математический анализ физических явлений в объекте.
Статические характеристики объекта управления устанавливают связь между установившимися значениями входа и выхода объекта. По виду статических характеристик объекты делятся на линейные и нелинейные. В последних статическая характеристика может быть гладкой, линеаризуемой в окрестности заданной точки, либо носить существенно нелинейный характер. При наличии в объекте нескольких нелинейностей, графическим методом определяется его суммарная нелинейная характеристика. Большинство систем регулирования относиться к классу систем автоматической стабилизации режима работы объекта относительно его рабочей точки (относительно номинального режима работы). В этом случае в процессе работы отклонения переменных, относительно рабочей точки будут малы, что позволяет использовать линейные модели объекта управления. Однако, при смене рабочей точки происходит изменение коэффициента усиления объекта, что будет негативно влиять на динамику замкнутой системы. Для системы автоматической стабилизации не обязательно определение полной статической характеристики объекта. Достаточно знать лишь динамический коэффициент усиления в окрестности рабочей точки. В тоже время на некоторых объектах управления необходимо знание всей статической характеристики процесса. Если она носит нелинейный характер, то с целью стабилизации общего коэффициента усиления системы, в замкнутый контур включают дополнительную нелинейность, обратную статической характеристике объекта. На практике такой подход реализуется путем использования регулирующих клапанов с различными видами расходной характеристики. Реальные объекты занимают в пространстве какой-либо объем, поэтому регулируемая величина зависит не только от времени, но и от текущих координат точки измерения. Поэтому полное описание объекта управления будет состоять из системы дифференциальных уравнений с частными производными. При использовании точечного метода измерения одним датчиком, система дифференциальных уравнений с частными производными переходит в систему уравнений с обычными производными. Это существенно упрощает построение математической модели объекта, позволяя определить его передаточную функцию. Однако при наличии множества датчиков, распределенных, например, по длине объекта, может возникнуть необходимость использования множества управляющих сигналов (распределенное управление). Объекты могут быть как стационарные и так и нестационарные. В нестационарных объектах параметры изменяются с течением времени (дрейфуют). Примерами таких объектов могут быть химический реактор с катализатором, активность которого падает с течением времени, или аэрокосмический аппарат, масса которого по мере выгорания топлива уменьшается. Такие явления должны учитываться при проектирование соответствующих систем управления. В зависимости от интенсивности случайных возмущений действующих на объект, они делятся на стохастические и детерминированные. В реальных условиях часто точно неизвестны ни точка приложения возмущения F, ни его характер.