

Процессы управления и вынужденные колебания в нелинейных системах
ЛЕКЦИЯ 24 Одночастотные вынужденные колебания. Частотные характеристики.
План.
Случай одночастотных вынужденных колебаний.
Пример.
Исследование вынужденных колебаний нелинейных систем представляет собой в общем сложную задачу в связи с отсутствием суперпозиции отдельных решений, а также существенным изменением поведения системы в зависимости от размера амплитуды колебаний, с наличием не единственного установившегося режима и возможностью перескоков с одного режима на другой, с особенностями высших гармоник, субгармоник, комбинационных частот и с многими другими факторами.
В данной лекции мы рассмотрим случай одночастотных вынужденных колебаний, т. е. колебаний нелинейной системы с частотой внешнего периодического воздействия, и найдем условия их существования.
Рассмотрим нелинейную систему с внешним воздействием (рис. 6.1), заданным в виде
F(t) = В sin t. (6.1)
Уравнение динамики системы имеет вид
![]()
Решение для вынужденных колебаний будем искать приближенно в форме
![]()
где задано, а неизвестными являются амплитуда а и фаза .

Рис.6.1.
Произведем гармоническую линеаризацию нелинейности:

где коэффициенты q(а) и q’(а) вычисляются для симметричных (нечетных) нелинейностей по прежним формулам (4.11), если в них положить = t+. Для конкретных нелинейностей можно здесь использовать формулы, полученные в лекции 13, 14.
Подставим (6.1), (6.3) u (6.4) в уравнение системы (6.2):

Используем символический метод определения периодического решения, подставив сюда р = j, а вместо sin t выражение еjt. Тогда получим

или
![]()
где


Рис. 6.2.
Уравнение (6.6) с двумя неизвестными а и можно решить графически, как показано на рис. 6.2. Правая часть (6.6) изображается в виде окружности радиуса В, а левая часть Z(a) строится как кривая по точкам с переменным параметром а. Точки пересечения окружности с кривой Z(a) дают решение, причем величина амплитуды вынужденных колебаний определяется в точке пересечения по отметкам на кривой Z, а фаза—но величине угла (рис. 6.2).
На рис. 6.2 окружности пересекают кривую только при радиусе большем некоторого порогового значения В >Впор- Следовательно, в этом случае одночастотные вынужденные колебания (6.3) возможны только при
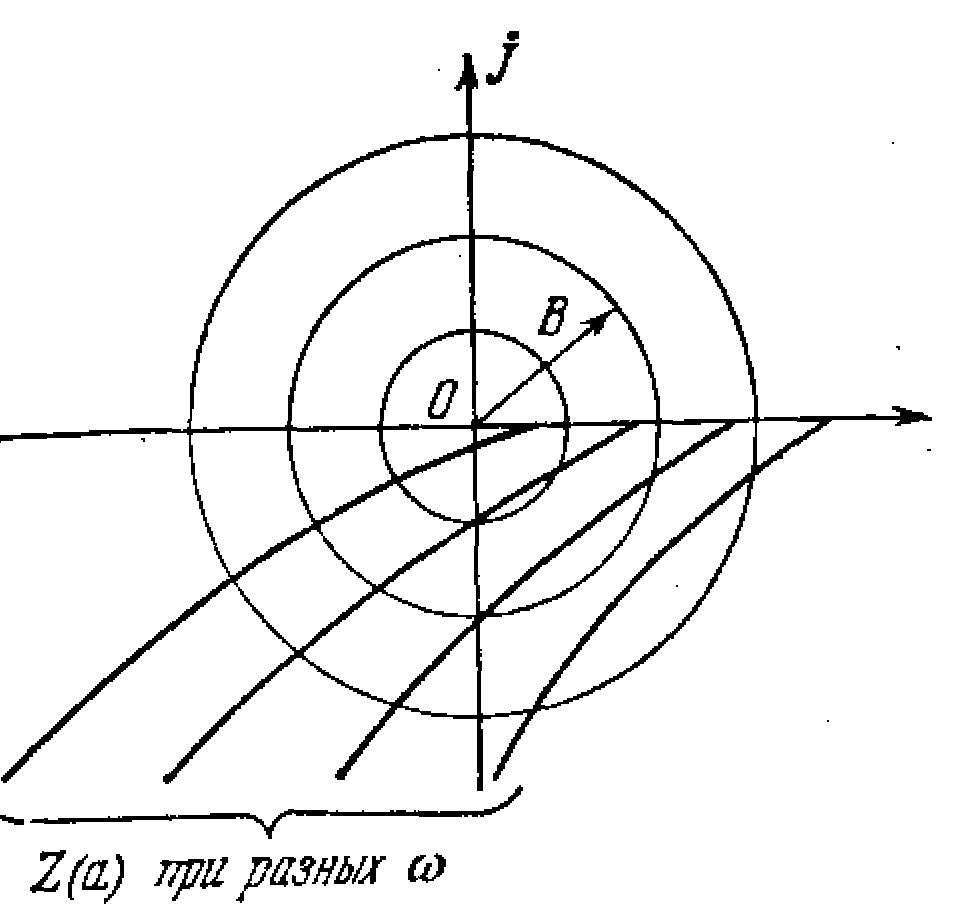
Рис. 6.3.

Pиc.6.4.
достаточно большой амплитуде В, а при меньшей амплитуде В внешнего воздействия будет иметь место сложное движение, включающее в себя и собственную частоту системы.
Построив серию кривых Z(a) по формуле (6.7) для разных значений частоты внешнего воздействия (рис. 6.3), можем построить график зависимости порогового значения В от частоты , например, в виде, изображенной на рис. 6.4, где а — частота автоколебаний данной системы. Тогда мы получим область значений В и а, в которой существуют одночастотные вынужденные колебания. Эта область называется областью захватывания. Явление захватывания состоит в том, что при В > Впор собственные колебания (автоколебания) срываются и система переходит целиком на одночастотные вынужденные колебания с частотой внешнего воздействия. Строго говоря, эти одночастотные вынужденные колебания будут несинусоидальными. В соответствии со свойством фильтра линейной части (лекция 12) они для переменной х будут только близки к синусоидальным (6.3). Об определении

Рис. 6.5.
высших гармоник этих колебаний см. [22].
На основании рис. 6.3 можно построить зависимости а() и (), т. е. частотные характеристики замкнутой нелинейной системы по первой гармонике (6.3). В линейных системах частотные характеристики А() и () не зависели от размера входной амплитуды и вычислялись для единичной амплитуды на входе. В нелинейной же системе характер частотных характеристик А()=а ()/B и () может существенно зависеть от размера В. Поэтому для разных значений В получается серия частотных характеристик (рис. 6.5) замкнутой системы по первой гармонике.
Пример. Пусть уравнение системы имеет вид

при гистерезисной нелинейности (рис. 6.6) и f(t) = B sin t. Тогда в уравнении (6.6), согласно (6.7), будем иметь

Для заданной частоты = 10 сек -1 и заданных параметров системы k = 10, с = 10, b = 4, Т1 = 0,01, T2 =0,02, кривая Z(a) изображена на рис. 6.6, где отмечены

Рис.6.6.

Рис. 6.7.
значения а. Проведя окружности разных радиусов В, по точкам пересечения определим зависимости а (В) и (В) (рис. 6.7) для вынужденных колебаний при данной частоте.