

лабораторная работа / Лабораторные / Тау4
.docПусть необходимо исследовать САУ с передаточной функцией разомкнутой системы
![]()
-
Создадим ZPK-обьект, найдем полюса и нули разомкнутой системы:
>> s=zpk('s'); W=1/(s*(0.08^2*s^2+2*0.08*0.5*s+1))
Ноль/Полюс/Увеличение:
156.25
------------------------
s (s^2 + 12.5s + 156.3)
>> pole(W)
ans =
0
-6.2500 +10.8253i
-6.2500 -10.8253i
>> zero(W)
ans =
Empty matrix: 0-by-1
-
Запустим SISO-Design Tool, импортируем ZPK-обьект из рабочего пространства.
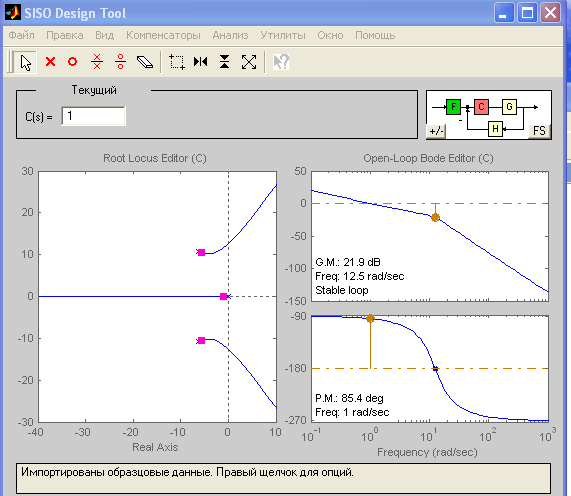
Диалоговое окно представлено на рисунке 3.

Рисунок 4. Корневой годограф и диаграмма Боде в устойчивом состоянии при С=1 .
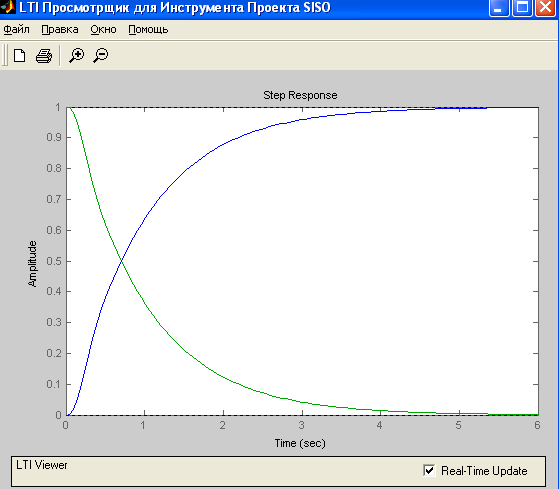
На рисунке 5 приведена переходная характеристика, соответствующая данному случаю.
3.Рисунок 6. Корневой годограф и логарифмические характеристики системы на границе устойчивосги при С=12

Рисунок 7. Значения полюсов при С=12
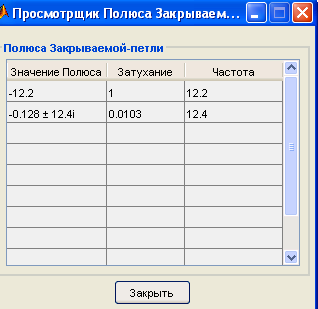
Рисунок 8. Переходная характеристика при С=12

4. При возможности система выводится в режим неустойчивого состояния путем перемещения корней в правую полуплоскость, отображаются корневой годограф, диаграммы Боде и переходная характеристика
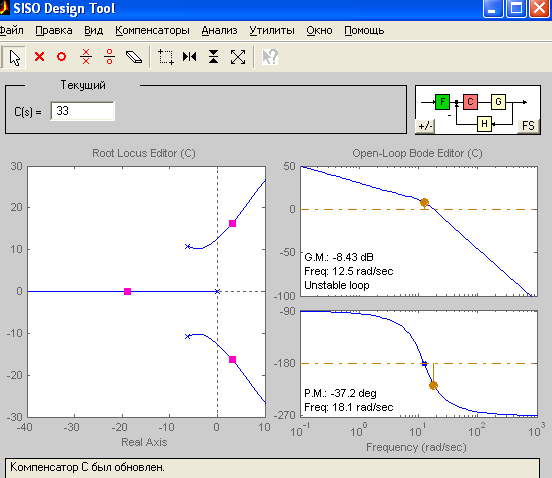
Рисунок 11 Корневой годограф неустойчивой САУ при С=33

Риеунок 12. Значения полюсов при С=3
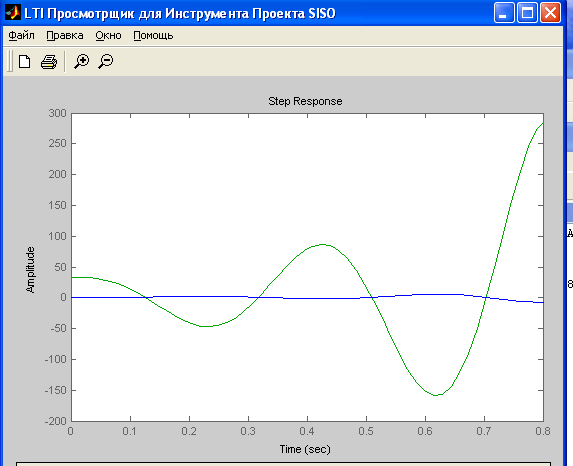
Рисунок 13. Переходная характеристика системы в неустойчивом состоянии при С=33
Using Toolbox Path Cache. Type "help toolbox_path_cache" for more info.
Для запуска, выберите "Помощь по MATLAB" из меню Помощь.
>> s=zpk('s'); W=1/(s*(0.08^2*s^2+2*0.08*0.5*s+1))
Ноль/Полюс/Увеличение:
156.25
------------------------
s (s^2 + 12.5s + 156.3)
>> pole(W)
ans =
0
-6.2500 +10.8253i
-6.2500 -10.8253i
>> zero(W)
ans =
Empty matrix: 0-by-1
>> zero(W)
ans =
Empty matrix: 0-by-1
Opening ident ....... done.
Opening ident ....... done.
>>
зультат
доказан на рисунке 4. Запасы устойчивости по фазе и амплитуде
эгмечены как на диаграмме, так и приведены их численные значения в левом нижнем углу каждой из характеристик. На рисунке 5 приведена пере-
ходная характеристика, соответствующая данному случаю.
Рисунок 4. Корневой годограф и диаграмма Боде в устойчивом состоянии при С=1
3. Захватив "мышью", передвигать красным курсором по корневому годографу до пересечения ветвей с мнимой осью, определить значение К***, при котором система окажется на границе устойчивости (рисунок 6). Передвижение курсора происходит также при вводе значения коэффициента усиления С в соответствующее поле ввода в верхней части GUI-интерфейса.
Для рассматриваемого случая С^З. Значение ю4* соответствует мнимой координате пересечения КГ мнимой оси. Просмотреть это значе-Щ? можно ь нижней части интерфейса или выбрав меню пункт ^^ЛЗомхШюр Poles" (рисунок 7).
Рисунок 5.^Дереходная функция системы
в устойчивом состоянии
'■
приС=1
шШ$&
JC^SS
Рисунок 6. Корневой годограф и логарифмические характеристики системы на границе устойчивосги при С=12
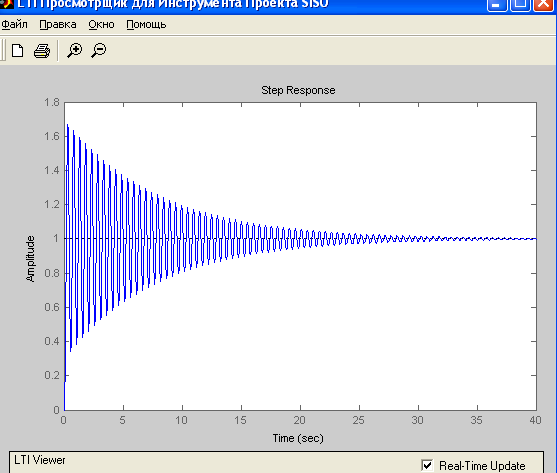
Рисунок 7. Значения полюсов при С=12

Приданных условиях самостоятельно строится переходная функция. 4. При возможности система выводится в режим неустойчивого состояния путем перемещения корней в правую полуплоскость, отображаются корневой годограф, диаграммы Боде и переходная характеристика
%ш&
Рисунок 8 Корневой годограф неустойчивой САУ при С=33



На рисунке 8 приведены корневой рактеристики неустойчивого положения усиления соответствует (Мб, а значения ке9.
одограф и логарифмические ха-системы, при этом коэффициент полюсов представлены на рисун-
Риеунок 9. Значения полюсов при 0=16
Переходная характеристика представлена на рисунке 10. По результатам работы делается вывод, что при увеличении коэффициента усиления уменьшается устойчивость системы.
stepRespwwe
Рисунок 10. Переходная характеристика
нии при 0*16
системы в неустойчивом состоя-
5. Для случая Ol (рисунок 4) аппроксимируем логарифмическую частотную характеристику прямыми со стандартными наклонами и запишем частоты сопряжения: аА = 2,2, ®2 = 4,8. Соответствующие им постоянные времени находятся обратным соотношением от частоты. Следовательно, Л = —- = 0,45, Т2 = — = о 21
Наклон -20 дб/дек соответствует интегрирующему звену с передаточной функцией W^p) = -, ^следующий наклон 0 дб/дек после частоты
<о\ соответствует включению форсирующего звена с передаточной функцией ^(я) = 0,45./>+1 и наклон -60 дбУдек после частоты ml апериодическому звену в 3 степени с передаточной функцией w (р) = *__
(0,021'p+if'
I Freq; 5.54 radfeec • • ■
Stable loop
Рисунок 11. Аппроксимированная ЛАЧХ при Ot Запишем аппроксимированную передаточную функцию:
*U/>) =
0,45-/?+! р-(021*р + \)3
SH
ко^а^Щвопрош
1-Дт опреДе„ение перед»^^ .
годографа. Назвать ТШ10ВЫе ^Щ Т^ ™«п°сов, Ш корневого
шясвязь? Ч№тшив«Рнцвми1МвбрЮ.
2-Дахьопредеяе^^^
определшъ по ее виду? шои' какие показатели можно
3. Показать влияние расположения Юля и
4. Провести анализ влияния измени а ^^ "-*^ указанию преподавателя) на величины (^ П0ЛЮСа "™ ^(Ш>
5. Перечислить основные свойства и»
тельной обратной связи ГОД0,рафа " ^ •*-»
6. Перечислить правила определения запасов «™-
«пасов устойчивости по Лазе и ш плятуде по логарифмическим характеристикам.
7. Что назывдется гркчю^екгом в среде Matlab?
8. Сформулировать алгоритм синтеза CAV M™«™
к вдняи сау методом корневого годографа.
ЛИТЕРАТУРА
1. Андриевский Б.Р., Фрадков АД Избранные главы теории автоматического управления с примерами в системе MatLab. - СПб.: Наука, 1999.
2. Бссекерский В А,. Попов ЕЛ. Теория систем автоматического регулирования. - М: Наука, 1975.
3. Дьяконов В. MATLAB 6: Учебный курс: Питер, 2001.
4. Дьяконов В., Абраменкова И., Круглое В. MATLAB с пакетами расширений. Нолидж. 2001.
5. Сборник задач по теории автоматического регулирования и управления/ J 1од редакцией В. А. Бесекерского. - М.: Наука, 1978.