

лабораторная работа / issledovanie_zakonov_regulirovaniya / Лаба№2
.docАСТРАХАНСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ
Кафедра «Автоматизация технологических процессов»
ЛАБОРАТОРНАЯ РАБОТА №2
«Исследование качества регулирования в одноконтурных АСР с различными алгоритмами функционирования регуляторов»
Выполнил: студент группы ДИА-41
Морозов А.С.
Проверил: доц. Кантемиров В.И.
Астрахань 2008г.
Цель работы: изучить основные алгоритмы функционирования регуляторов и их динамические хар-ки. Освоить метод приближенного расчета параметров регуляторов. Исследовать качества переходных процессов в одноконтурных системах с различными регуляторами при оптимальных настройках.
Ход работы:
-
Анализ переходной характеристики исследуемой САР и расчет настроек регуляторов:



 Т
Т

![]()
τ

-
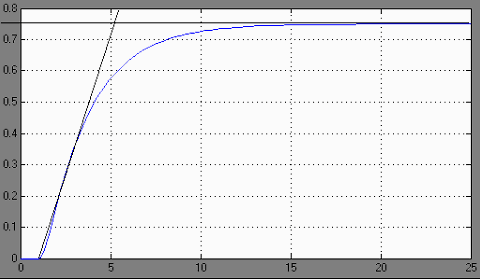
Найдем характеристики переходного процесса:
 ;
Т=4,18(с);
;
Т=4,18(с);
 .
. -
Определим скорость разгона:
 .
. -
Определим степень самовыравнивания:
 ,
где
,
где амплитуда
ступенчатого воздействия.
амплитуда
ступенчатого воздействия.
-
Найдем произведение
 .
.
-
Используя таблицу №1 найдем выражения для определения настроек регуляторов.
Таб.№1
|
Регулятор |
|
0,2< |
||||
|
|
|
|
|
|
|
|
|
П |
|
- |
- |
|
- |
- |
|
ПИ |
|
|
- |
|
|
- |
|
ПИД |
|
|
|
|
|
|
-
Рассчитаем настройки регуляторов:
|
Регу-лятор |
|
|
|
|
П |
|
- |
- |
|
ПИ |
|
|
- |
|
ПИД |
|
|
|
-
Исследование одноконтурной САР без регуляторов:
-
Определим перерегулирование:
 .
. -
Определим время переходного процесса:
 .
. -
Определим статическую ошибку:
 .
. -
Рассчитаем аналитически статическую ошибку:
 ,
где λ-
управляющее воздействие; К-коэффициент
передачи системы (в данном случае коэф.
усиления).
,
где λ-
управляющее воздействие; К-коэффициент
передачи системы (в данном случае коэф.
усиления).
-
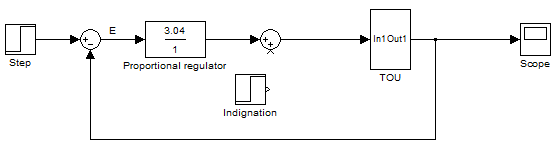
Исследование одноконтурной САР с П-регулятором:

TOU :
-
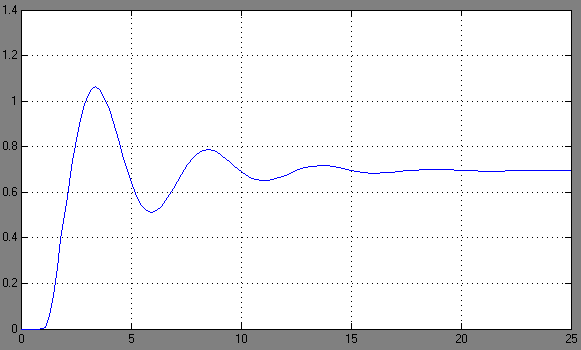
Получим переходную характеристику по каналу управляющего воздействия:
Схема:
-
Определим перерегулирование:
 .
. -
Определим время переходного процесса:
 .
. -
Определим декремент затухания:
 .
. -
Определим время установления (достижение первого max):
-
Определим время длительности фронта (время нарастания переходного процесса):
 .
. -
Определим число колебаний за время переходного процесса:
 .
. -
Определим собственную частоту колебаний системы:
 (рад/с).
(рад/с). -
Определим статическую ошибку:
 .
. -
Рассчитаем аналитически статическую ошибку:
 .
.
-
Получим переходную характеристику по каналу возмущающего воздействия:
Схема:

-
Определим перерегулирование:
 .
. -
Определим время переходного процесса:
 .
. -
Определим декремент затухания:
 .
. -
Определим время установления (достижение первого max):

-
Определим время длительности фронта (время нарастания переходного процесса):
 .
. -
Определим число колебаний за время переходного процесса:
 .
. -
Определим собственную частоту колебаний системы:
 (рад/с).
(рад/с). -
Определим статическую ошибку:
 .
. -
Рассчитаем аналитически статическую ошибку:
 ,
где δ-
возмущающее воздействие; Кр-коэф.
передачи регулятора; КОБ-
коэф. передачи объекта регулирования.
,
где δ-
возмущающее воздействие; Кр-коэф.
передачи регулятора; КОБ-
коэф. передачи объекта регулирования.
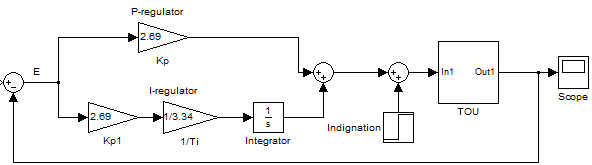
Исследование
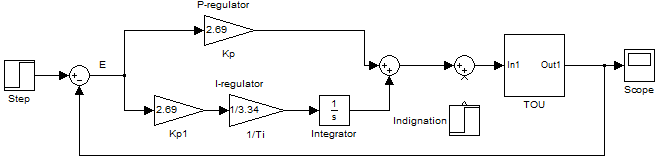
одноконтурной САР с ПИ-регулятором:
![]()

-
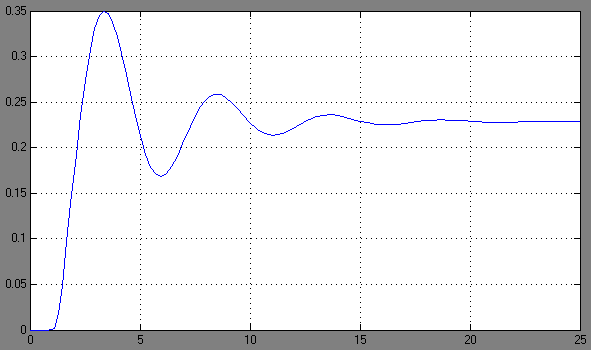
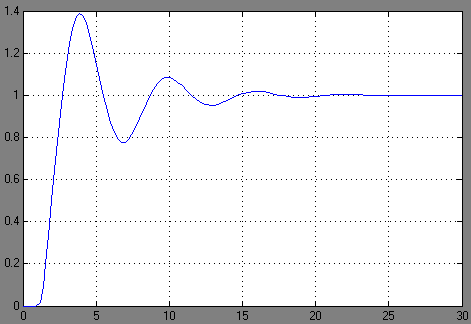
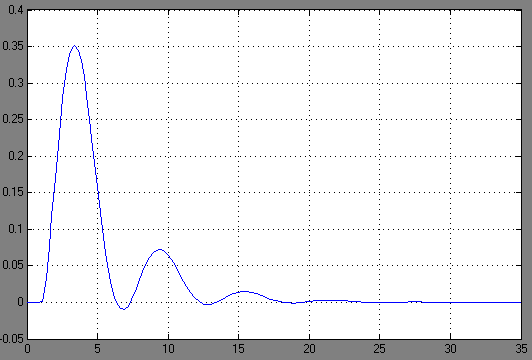
Получим переходную характеристику по каналу управляющего воздействия:
Схема:
-
Определим перерегулирование:
 .
. -
Определим время переходного процесса:
 .
. -
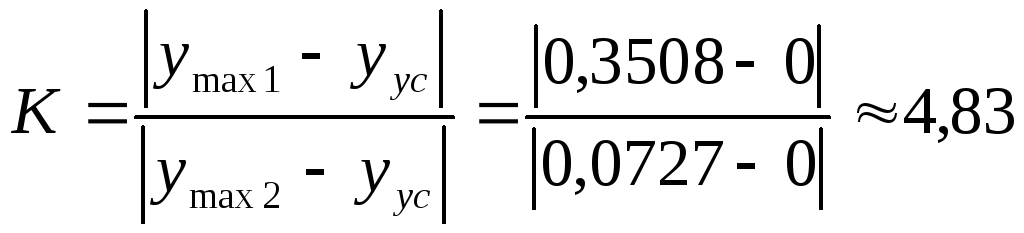
Определим декремент затухания:
 .
. -
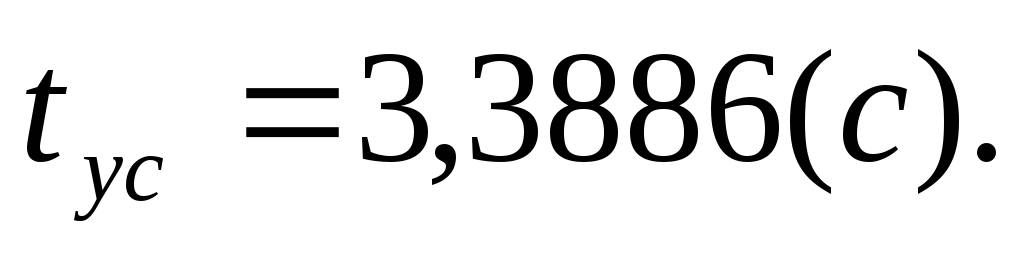
Определим время установления (достижение первого max):

-
Определим время длительности фронта (время нарастания переходного процесса):
 .
. -
Определим число колебаний за время переходного процесса:
 .
. -
Определим собственную частоту колебаний системы:
 (рад/с).
(рад/с). -
Определим статическую ошибку:
 .
. -
Рассчитаем аналитически статическую ошибку:
Коэф. передачи
системы К
является
произведением коэф. передачи регулятора
и коэф. передачи объекта регулирования
КОБ=0,75.
Для нахождения
коэф. передачи ПИ-регулятора найдем его
передаточную ф-цию:
![]() .
Используем
ф-цию пакета
Matlab
.
Используем
ф-цию пакета
Matlab
dcgain для нахождения коэф. передачи:
r=tf([8.9846 2.69],[3.34 0]);
dcgain(r);
ans
= Inf
– коэф. передачи ПИ-регулятора равен
бесконечности
![]()
![]()
-
Получим переходную характеристику по каналу возмущающего воздействия:
Схема:
-
Определим время переходного процесса:
 .
. -
Определим декремент затухания:
 .
. -
Определим время установления (достижение первого max):
-
Определим время длительности фронта (время нарастания переходного процесса):
 .
. -
Определим число колебаний за время переходного процесса:
 .
. -
Определим собственную частоту колебаний системы:
 (рад/с).
(рад/с). -
Определим статическую ошибку:
 .
. -
Рассчитаем аналитически статическую ошибку:
 .
.
-
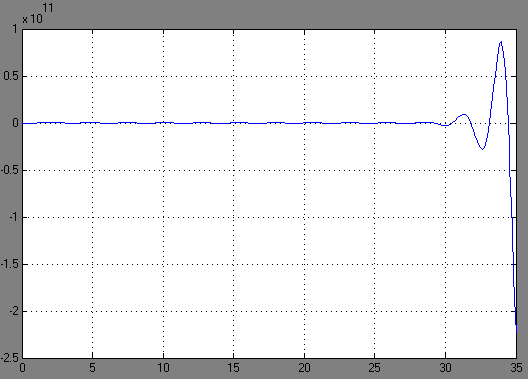
Исследование одноконтурной САР с ПИД-регулятором:
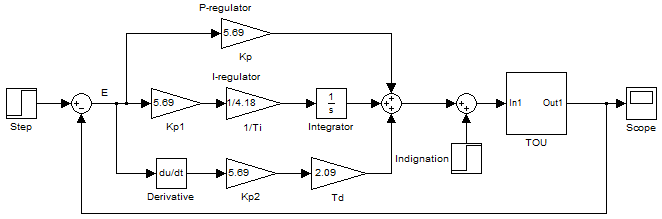
-
Получим переходную характеристику по каналу управляющего воздействия:
Схема:
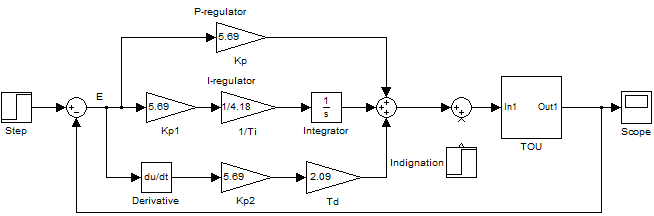
-
Получим переходную характеристику по каналу возмущающего воздействия:
Схема:

Вывод:
в ходе лабораторной работы были
исследованы П, ПИ, и ПИД законы регулирования
на примере одноконтурной САР. Исходная
одноконтурная САР без регуляторов имела
следующие показатели качества:
![]() ,
,![]() ,
,![]() (по каналу управления и возмущения). При
использовании П-регулятора с Кр=3,04
показатели
качества стали следующие: по каналу
управления (
(по каналу управления и возмущения). При
использовании П-регулятора с Кр=3,04
показатели
качества стали следующие: по каналу
управления (![]() ,
,
![]() ,
,
![]() ),
по каналу возмущения (
),
по каналу возмущения (![]() ,
,
![]() ,
,
![]() ).
При использовании П-регулятора время
переходного процесса увеличилось в 2,5
раза, перерегулирование – в 12,6 раз,
статическая ошибка уменьшилась на
0,2676 в сравнении с исходным значением.
).
При использовании П-регулятора время
переходного процесса увеличилось в 2,5
раза, перерегулирование – в 12,6 раз,
статическая ошибка уменьшилась на
0,2676 в сравнении с исходным значением.
При использовании
ПИ-регулятора с Кр=2,69
и Ти=3,34(с)
показатели
качества стали следующие: по каналу
управления (![]() ,
,
![]() ,
,
![]() ),
по каналу возмущения (
),
по каналу возмущения (![]() ,
,
![]() ).
При использовании ПИ-регулятора время
переходного процесса увеличилось в 2,7
раза, перерегулирование – в 9,2 раза,
статическая ошибка равна 0.
).
При использовании ПИ-регулятора время
переходного процесса увеличилось в 2,7
раза, перерегулирование – в 9,2 раза,
статическая ошибка равна 0.
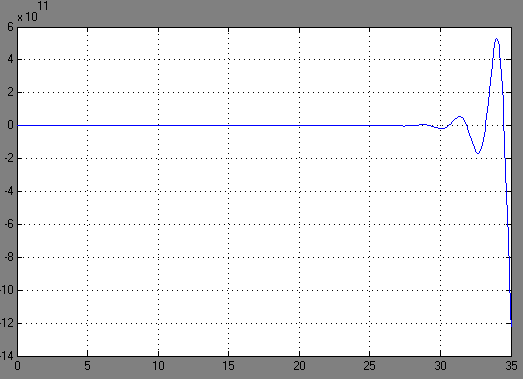
При использовании ПИД – регулятора с Кр=5,69 , Ти=4,18(с) и Тд=2,09(с) система потеряла устойчивость.
Для данной
одноконтурной САР лучшие показатели
качества имели место при использовании
ПИ – регулятора, т.к.
![]() .
.
Значения статических ошибок полученные экспериментально и рассчитанные аналитически совпадают с точностью до сотых.