

14 Поясните способ регулирования координат электропривода с асинхронным двигателем изменением напряжения. Приведите соответствующие статические характеристики и формулы.
Этот способ регулирования скорости является в настоящее время наиболее эффективным и широко используемым. Изменение величины напряжения, подводимого к статору АД позволяет осуществить в статическом и динамическом режимах регулирование его координат с хорошими показателями качества и с помощью относительно простых схем управления, а также обеспечить наиболее экономичные режимы работы АД. На рисунке 3.8 представлены схема питания АД от регулятора напряжения и механические характеристики АД.
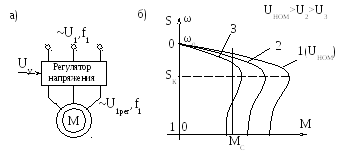
Рисунок 3.8 – Схема регулирования координат АД изменением напряжения на статоре и механические характеристики
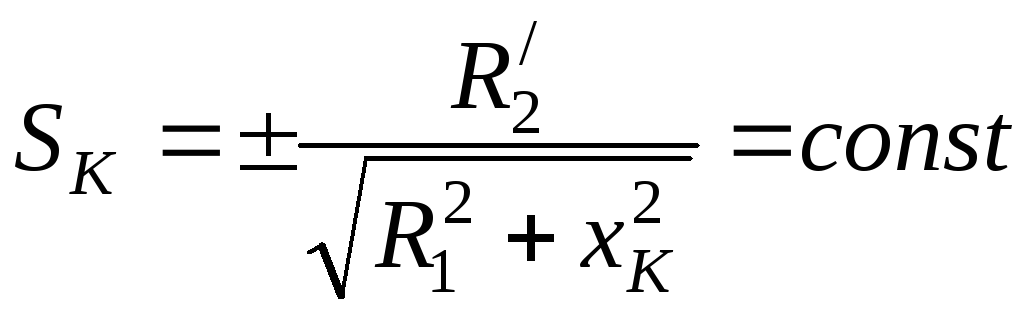
Изменяя величину напряжения управления, можно регулировать напряжение на статоре АД в пределах от 0 до номинального значения. При этом частота напряжения остается постоянной. Критическое скольжение для всех характеристик также остается постоянным, а критический момент резко уменьшается (пропорционально квадрату снижения напряжения). Характеристика 1 является естественной, а остальные искусственными.
![]()
Такие искусственные характеристики могут использоваться для воздействия в переходных процессах на момент АД, в том числе и пусковой. Для регулирования напряжения на статоре чаще всего используются автотрансформаторы, магнитные усилители, а также тиристорные регуляторы напряжения.
Тиристорные регуляторы отличаются высоким КПД, высокой надежностью, простотой в обслуживании и позволяют легко автоматизировать работу ЭП.
15 Поясните способ регулирования координат электропривода с асинхронным двигателем изменением частоты. Приведите соответствующие статические характеристики и формулы.
Принцип частотного
способа основан на том, что изменяя
частоту
![]() питающего двигатель напряжения, можно
соответственно с формулой
питающего двигатель напряжения, можно
соответственно с формулой
![]() изменять скорость вращения магнитного
поля статора, получая при этом различные
искусственные характеристики.
изменять скорость вращения магнитного
поля статора, получая при этом различные
искусственные характеристики.
Достоинства способа:
1 Широкий диапазон регулирования скорости;
2 Плавность регулирования
3 Высокая жесткость получаемых характеристик
4 Невысокие потери
скольжения
![]()
Для лучшего использования АД и получения высоких энергетических показателей его работы одновременно с частотой необходимо изменять и подводимое напряжение, закон изменения которого зависит от характера изменения нагрузки.
Преобразователь частоты и напряжения 1 по сигналу управления преобразует входное напряжение стандартных параметров в напряжение с регулируемыми частотой и амплитудой (рисунок 3.10,а).
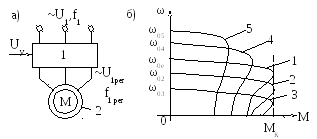
Рисунок 3.10 – Схема и механические характеристики АД при частотном способе регулирования координат
Характеристика 1 (рисунок 3.10,б) является естественной. Она соответствует номинальной частоте питающего напряжения.
Искусственные механические характеристики по своим особенностям делятся на два семейства. Первое – характеристики соответствующие частотам ниже номинальной, для которых критический момент остается постоянным (характеристики 2 и 3). Второе семейство – это характеристики, соответствующие частотам выше номинальной, где критический момент уменьшается с увеличением частоты (характеристики 4 и 5).