

4 Построение матрицы функций модальной чувствительности
Характеристический полином замкнутой системы выглядит следующим образом:
![]()
Желаемые
корни:
![]()
Из
уравнения
![]() ,
где
,
где
![]() находится матрица
находится матрица
![]()
![]()
Обратная матрица:
![]() .
.
Вычислим
функции модальной чувствительности
![]() (
(![]() )
с помощью соотношений:
)
с помощью соотношений:
![]()
![]() ,
, ![]() ;
;
![]() ,
, ![]() ;
;
![]() ,
, ![]() ;
;
![]() ,
, ![]() ;
;
![]() ,
, ![]() .
.
Сконструируем матрицу функций модальной чувствительности в виде функций чувствительности вещественной и мнимой частей:
 ,
причем
,
причем
![]()
Для выделения неблагоприятного сочетания вариаций параметров воспользуемся сингулярным разложением матрицы модальной чувствительности:
![]()
![]() ,
,
![]() ,
,
 .
.
Зададимся
сферой
![]() с тем, чтобы все вариации параметров
ограничить числом 0,5 – пределы применимости
теории чувствительности.
с тем, чтобы все вариации параметров
ограничить числом 0,5 – пределы применимости
теории чувствительности.
Введем
наиболее неблагоприятное сочетание
вариаций параметров, задаваемое
вектором-столбцом матицы
![]() ,
соответствующим максимальному
сингулярному числу:
,
соответствующим максимальному
сингулярному числу:
 ,
,
а
также наиболее благоприятное сочетание
вариаций параметров, задаваемое
вектором-столбцом матицы
![]() ,
соответствующим минимальному сингулярному
числу:
,
соответствующим минимальному сингулярному
числу:

5 Получение вмо ноу с интервальными параметрами
Необходимо получить ВСВ НОУ с интервальными матричными компонентами в форме:
![]()
где
![]()
с
использованием интервальной арифметики
на основе интервальной реализации
параметров
![]() ,
записываемых в форме
,
записываемых в форме
![]()
при
следующих граничных (угловых) значениях:
![]()
В пункте 1 было получено представление НОУ в виде ВСВ:
![]()
 ,
,
 ,
,
![]() .
.
Однако в данном случае матрица В также зависит от q, а необходимо стремиться к тому, чтобы интервальной была бы только матрица состояния НОУ. Поэтому управление принимается за дополнительную переменную состояния, и вводится буферная система:
![]() ,
,
где v – новое управление. Тогда матрицы описания агрегированной системы будут выглядеть следующим образом:


![]()
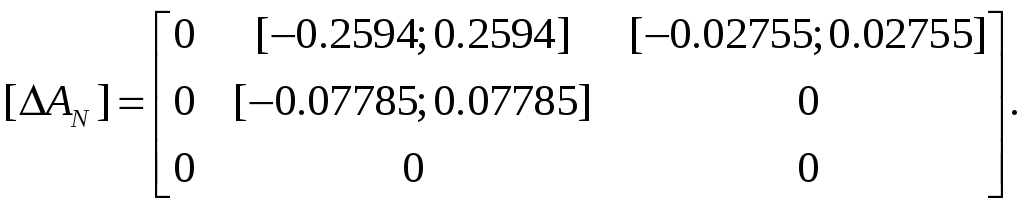
Матрица с интервальными параметрами выглядит следующим образом:

Далее воспользуемся формулами интервальной арифметики:

Тогда окончательно интервальная матрица состояния имеет вид:

Граничные
значения матрицы
![]() получаются с помощью компоновки
экстремальных значений каждой её
составляющей.
получаются с помощью компоновки
экстремальных значений каждой её
составляющей.
 ,
,
 .
.
Медианное значение интервальной матрицы находятся как полусумма угловых значений:
 .
.
Интервальный
матричный компонент:
![]()
Окончательно имеем следующее описание:
![]()
где

6 Синтез закона медианного модального управления
Необходимо
синтезировать закон медианного модального
управления, базовый алгоритм которого
дополняется контролем нормы
![]() медианной составляющей интервальной
матрицы
медианной составляющей интервальной
матрицы
![]() спроектированной системы с последующим
вычислением оценки
спроектированной системы с последующим
вычислением оценки
![]() ,
вычислить матрицы kg
и k.
,
вычислить матрицы kg
и k.
Закон управления (ЗУ) вида u(t)=kgg(t)-kx(t) должен доставлять системе
![]()
![]()
образованной объединением НОУ и ЗУ равенство входа g(t) и выхода y(t) в неподвижном состоянии при номинальных значениях параметров с помощью:
-матрицы kg прямой связи по входу g(t);
- матрицы k обратной связи по состоянию x(t)
распределение
мод Баттерворта с характеристической
частотой
![]() ,
которая гарантирует достижение значение
оценки относительной интервальности
матрицы состояния системы
,
которая гарантирует достижение значение
оценки относительной интервальности
матрицы состояния системы
![]() не больше заданной
не больше заданной
![]() .
.
Выберем желаемый полином Баттерворта следующим образом:
![]()
Формирование эталонной модели:
![]()
Матрица
![]() составляется, исходя из требуемого
распределения мод:
составляется, исходя из требуемого
распределения мод:
![]() ,
, ![]() ;
;
![]() ,
,
![]()
 .
.
Матрица
![]() выбирается из условия полной наблюдаемости
пары
выбирается из условия полной наблюдаемости
пары
![]() и
и
![]() :
:
![]() .
.
Решим задачу медианного МУ с помощью уравнения Сильвестра:
![]() ,
,
 .
.
Формирование
медианной составляющей
![]() интервальной матрицы
интервальной матрицы
![]() :
:
![]() ,
,
 ,
,
Проверка
выполнения условия
 :
:
 .
.
Таким
образом, на частоте
![]() достигается требуемая относительная
интервальность матрицы состояния
системы.
достигается требуемая относительная
интервальность матрицы состояния
системы.
Формирование закона управления:
![]() ,
, ![]() .
.
![]() ,
, ![]() .
.
Закон управления имеет вид:
![]() .
.
Реализационная версия этого закона имеет вид:
![]() .
.
Схема моделирования замкнутой системы приведена на рисунке 9, переходные процессы – на рисунке 10.

Рисунок 10 – Схема моделирования замкнутой системы

Рисунок 11 – Переходная характеристика для медианного, максимального и минимального набора параметров
Влияние вариаций параметров в пределах заданного интервала на показатели качества системы отражено в таблице 2.
Таблица 2 - Влияние вариаций параметров в пределах заданного интервала на показатели качества системы
|
Матрица состояния |
|
|
|
|
|
|
2 |
8 |
0 |
0 |
|
|
4.35 |
27 |
117.5 |
237.5 |
|
|
1.32 |
0 |
34 |
100 |
Проверим робастность системы с помощью метода Харитонова.
Матрица
![]() имеет вид:
имеет вид:

Характеристический полином:

![]()
Полиномы Харитонова:
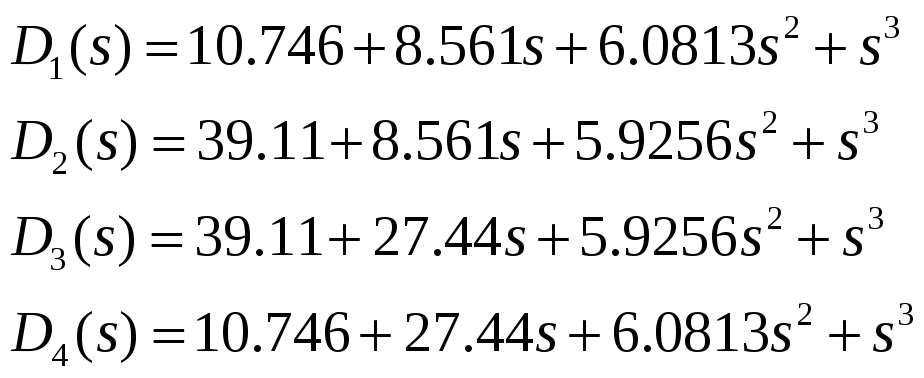
Корни полиномов Харитонова:

Поскольку действительные части корней всех полиномов Харитонова отрицательны, полиномы гурвицевы и характеристический полином системы гурвицев при отклонениях параметров в заданных границах, следовательно, система робастно устойчива.