

лабораторная работа / Комлева / ТАУ лр1
.docЦЕЛЬ РАБОТЫ: получение навыков исследования линейных динамических моделей в программном пакете Matlab и ознакомление с временными и частотными характеристиками систем автоматического управления (САУ).
ОСНОВНЫЕ понятия
Рассмотрим динамические стационарные системы управления с одним входом и одним выходом. При этом модель одномерной САУ задана в виде комплексной передаточной функции, записанной как отношение полиномов
 .
.
Комплексные числа, являющиеся корнями многочлена В(s), называются нулями передаточной функции, а корни многочлена A(s) – полюсами.
Динамические свойства САУ могут быть определены по его переходной функции и функции веса.
Пусть на вход системы поступает скачкообразное воздействие при величине скачка, равной единице u(t) = 1(t), то есть подается функция Хевисайда (рисунок 1), определяемая

Реакция САУ на единичный скачек называется переходной функцией системы и обозначается h(t). Для автоматических систем является распространенным видом входного воздействия. Как правило, подобные воздействия сопровождают процессы включения систем и вызывают переходы от одного установившегося состояния к другому.


Рисунок 1 Функция Хевисайда Рисунок 2 Функция Дирака.
Если u(t) = δ(t), то есть на вход системы поступает функция Дирака (δ-функция, импульсная функция, рисунок 2) определяемая

то реакция САУ называется импульсной переходной функцией системы (функция веса) и обозначается w(t). Для автоматических систем является менее распространенным видом входного воздействия, чем единичная ступенчатая функция. Однако для теоретического описания последних имеет существенное значение. Подобные воздействия характерны для радарных комплексов, описывают передачу импульса при упругом взаимодействии и т.д.
Импульсная и переходная функции системы связаны соотношением:
 .
.
Функция веса связана с передаточной функцией преобразованием Лапласа:
W(s)
= ![]() w(t)
e -st dt.
w(t)
e -st dt.
Переходная функция связана с передаточной функцией преобразованием Карсона:
W(s)
= ![]() h(t)
e -st dt.
h(t)
e -st dt.
Благодаря широкому применению при исследовании устойчивости динамических систем и проектировании регуляторов получили распространение частотные характеристики.
Если на вход любой системы подать сигнал синусоидальной формы:
x(t) = Xm cos(wt) = Xm e jwt .
Очевидно, что выходной сигнал будет иметь ту же форму:
y(t) = Ym cos(wt+j) = Ym e j(wt+j) .
Зависимость же между амплитудами и фазами выходного и входного сигналов определяет ДУ движения системы.
Частотная передаточная функция получается из обычной заменой оператора Лапласа s на комплексную частоту jw, т.е. в результате перехода от изображения Лапласа к изображению Фурье:
![]() .
.
При фиксированном значении ω частотная характеристика является комплексным числом, и, следовательно, может быть представлена в виде
![]() .
.
Здесь
![]() –
амплитудно-частотная
характеристика (АЧХ);
–
амплитудно-частотная
характеристика (АЧХ);
![]() –
фазово-частотная
характеристика (ФЧХ);
–
фазово-частотная
характеристика (ФЧХ);
![]() –
вещественная
частотная характеристика (ВЧХ);
–
вещественная
частотная характеристика (ВЧХ);
![]() –
мнимая
частотная характеристика (МЧХ).
–
мнимая
частотная характеристика (МЧХ).
Геометрическое
место точек W(iω)
на комплексной плоскости при изменении
ω от ω0
до от ω1
(обычно ω0 = 0,
ω1 = ![]() ),
называется амплитудно-фазовой
характеристикой (АФХ) или частотным
годографом Найквиста.
),
называется амплитудно-фазовой
характеристикой (АФХ) или частотным
годографом Найквиста.
Имеет широкое практическое значение логарифмическая амплитудная характеристика, ЛАХ (диаграмма Боде), которая определяется как L = 20 lg A(ω), измеряется в децибелах и строится как функция от lg ω.
ЗАДАНИЕ.
Задана передаточная функция:
![]()
Найдем ее динамические и частотные характеристики. Будем работать в командном режиме среды Matlab.
-
Создадим LTI – объект с именем w, для этого выполним:
>> w=tf([-3 8],[-1 -4 -6 -4])
Transfer function:
3 s - 8
---------------------
s^3 + 4 s^2 + 6 s + 4
2. Найдем полюса и нули передаточной функции с использованием команд pole, zero.
>> pole (w)
ans =
-2.0000
-1.0000 + 1.0000i
-1.0000 - 1.0000i
>> zero (w)
ans =
2.6667
3.Построим передаточную функцию командой step(w). Результат ее выполнения приведен на рисунке:

Рис.1 Переходная функция h(t)
4. Построим импульсную переходную функцию командой impulse (w)

Рис.2 Импульсная переходная функция.
5. Диаграмму Боде получим, используя команду bode (w).
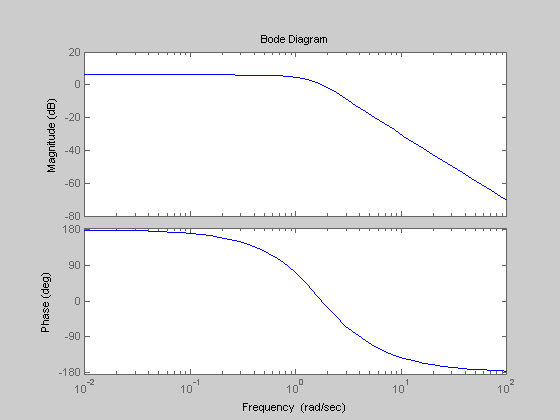
Рис.3 Логарифмические частотные характеристики.
6. Определим частотный годограф Найквиста, выполнив команду nyquist (w)

Рис.4 Частотный гадограф.
Каждая из построенных характеристик полностью и однозначно определяет рассматриваемую систему управления.