

4. Паливна економічність автопотягу.
Робота автомобіля в складі автопотягу супроводжується підвищенням загальної витрати палива внаслідок росту сил опору руху. Відповідно збільшується і витрата палива, віднесена до одиниці пробігу. Однак витрата палива, що припадає на одиницю транспортної роботи (т.км) або масу вантажу (т) зменшується. В результаті собівартість перевезення стає меншою.
Щоб з’ясувати причини покращення паливної економічності при використанні причепів, визначимо витрату палива автопотягом на одиницю транспортної роботи:
![]() ;
;
Шляхові витрати палива:
![]() ;
;
Підставимо
значення Q
в попередню формулу
![]() і отримаємо витрату палива автопотягом
за одиницю транспортної роботи:
і отримаємо витрату палива автопотягом
за одиницю транспортної роботи:
![]() ;
;
Відношення
![]() називають коефіцієнт використання
пробігу
називають коефіцієнт використання
пробігу
![]() .
.
Окрім цього маса вантажу:
![]() ;
;
де Gгр – вага вантажу в Н.
Таким чином:
![]() або
або
![]() ;
;
Вага
автопотягу
![]() ,
тому
,
тому
![]() ;
;
Таким чином, витрата палива у великій мірі залежить від відношення власної ваги автопотягу до ваги вантажу і зменшується при зменшенні цього відношення. Власна маса причепа значно менша маси автомобіля тієї ж вантажопідйомності. Тому у випадку застосування причепа кількість вантажу збільшується майже вдвоє, а власне вага автопотягу на 50-60 %.Окрім того, ступінь використання потужності двигуна у автомобіля, що буксирує причеп вища, чим у одного автомобіля, значить ge менша. ККД трансмісії сідлового тягача вища, ніж ККД бортового автомобіля, оскільки більше навантаження, що передається трансмісією. В результаті витрата палива, віднесена до одиниці транспортної роботи у авто потягів значно менша.
Лекція 8
Стійкість автомобіля
Показники стійкості. Під втратою автомобілем стійкості розуміють перекидання або ковзання автомобіля. В залежності від напрямку перекидання розрізняють поздовжню і поперечну стійкість.
Найбільш вірогідна і небезпечна втрата поперечної стійкості, яка відбувається під дією відцентрової сили та поперечної складової сили тяжіння автомобіля, сили бокового вітру, а також при боковому ударі коліс об нерівності дороги. Показниками поперечної стійкості являються максимально можливі швидкості руху по колу і кути поперечного нахилу дороги (косогору). Обидва показника можуть бути визначені з умов поперечного ковзання коліс (заносу) та перекидання автомобіля.
Таким чином існують чотири показника поперечної стійкості:
![]() – максимальні
(критичні) швидкості руху автомобіля
по колу, відповідні початку його ковзання
і перекидання (м/с).
– максимальні
(критичні) швидкості руху автомобіля
по колу, відповідні початку його ковзання
і перекидання (м/с).
![]() – максимальні
(критичні) кути косогору відповідні
початку поперечного ковзання і
перекидання.
– максимальні
(критичні) кути косогору відповідні
початку поперечного ковзання і
перекидання.
По аналізу факторів, що впливають на стійкість, необхідно знати поперечну силу, що викликає занос і перекидання. При повороті нею є відцентрова сила. Для її визначення розглядаємо схему, допустивши, що автомобіль являється плоскою фігурою і рухається по горизонтальній дорозі, а шини в поперечному напрямку не деформуються.

Рисунок 17 – Рух автомобіля на повороті
На ділянці дороги 1-2 автомобіль рухається прямолінійно, і його керовані колеса знаходяться в нейтральному положенні.
На
ділянці 2-3 водій повертає колеса і
автомобіль рухається по кривій перемінного
радіуса. На ділянці 3-4 положення керованих
коліс повернутих на кут
![]() ,
залишається незмінним, а радіус R
траєкторії середини заднього моста
постійними. На ділянці 4-5 водій повертає
колеса в зворотньому напрямку і радіус
поступово збільшується. На ділянці 5-6
автомобіль знову рухається прямолінійно.
,
залишається незмінним, а радіус R
траєкторії середини заднього моста
постійними. На ділянці 4-5 водій повертає
колеса в зворотньому напрямку і радіус
поступово збільшується. На ділянці 5-6
автомобіль знову рухається прямолінійно.
При рівномірному русі по дузі постійного радіуса відцентрова сила (Н):
![]() ,
,
оскільки
![]() ;
; ![]() ;
; ![]() ,
,
де ![]() – маса автомобіля (кг);
– маса автомобіля (кг);
![]() – кутова швидкість (рад/с);
– кутова швидкість (рад/с);
![]() – відстань від центра повороту до центра
тяжіння (м)
– відстань від центра повороту до центра
тяжіння (м)
![]() – кут між радіусом
– кут між радіусом
![]() повороту центра тяжіння і продовження
осі заднього моста.
повороту центра тяжіння і продовження
осі заднього моста.
![]() – кут між подовжньою віссю автомобіля
і вектором швидкості середини переднього
мосту; цей кут приблизно дорівнює півсумі
кутів повороту керованих коліс.
– кут між подовжньою віссю автомобіля
і вектором швидкості середини переднього
мосту; цей кут приблизно дорівнює півсумі
кутів повороту керованих коліс.
Втрата
стійкості автомобілем особливо небезпечна
при високій швидкості, коли його рух
наближений до прямолінійного. Кут
![]() при цьому порівняно невеликий і можна
вважати, що
при цьому порівняно невеликий і можна
вважати, що
![]() .
.
Таким чином відцентрова сила:
![]() ;
;
Поперечна складова відцентрової сили:
![]() ;
;
При русі по перехідним кривим на автомобіль діє також сила, що викликана зміною кривизни траєкторії.
Поперечна складова цієї сили пропорційна швидкості автомобіля і кутовій швидкості повороту керованих коліс:
![]() ;
;
Чим
більша швидкість автомобіля і чим
різкіше водій повертає рульове колесо,
тим більша сила
![]() ,
і як наслідок вірогідна втрата стійкості.
,
і як наслідок вірогідна втрата стійкості.
Таким чином сумарна відцентрова сила:
![]() ;
;
Сила
![]() ,
що діє на автомобіль при криволінійному
русі, пропорційна квадрату швидкості
,
що діє на автомобіль при криволінійному
русі, пропорційна квадрату швидкості
![]() і куту
і куту
![]() .
Сила
.
Сила
![]() діє тільки під час повертання передніх
коліс. При входженні автомобілем в
поворот
діє тільки під час повертання передніх
коліс. При входженні автомобілем в
поворот
![]() має знак „мінус” і автомобіль може
рухатись з більшою швидкістю без втрати
стійкості. Практично сила
має знак „мінус” і автомобіль може
рухатись з більшою швидкістю без втрати
стійкості. Практично сила
![]() впливає на стійкість лише на початку
першої перехідної кривої і в кінці
другої, коли ця сил співрозмірна з силою
впливає на стійкість лише на початку
першої перехідної кривої і в кінці
другої, коли ця сил співрозмірна з силою
![]() .
На ділянці постійного радіусу (колової
кривої) вона відсутня, оскільки
.
На ділянці постійного радіусу (колової
кривої) вона відсутня, оскільки
![]() .
.
В
результаті повороту автомобіля навколо
його центра тяжіння виникає також
інерційний момент, пропорційний кутовому
прискоренню і моменту інерції. Під дією
![]() відбувається перерозподіл поперечних
реакцій дороги між мостами, але звичайно
вплив цього моменту на стійкість
невеликий і його можна не враховувати.
відбувається перерозподіл поперечних
реакцій дороги між мостами, але звичайно
вплив цього моменту на стійкість
невеликий і його можна не враховувати.

а – критичних швидкостей; б – критичного кута косогору
Рисунок 18 – Схема до розрахунку показників поперечної стійкості
Під
дією відцентрової сили
![]() автомобіль може перекидатись відносно
осі, що проходить через центри контактів
зовнішніх коліс з дорогою. Складемо
рівняння моментів сил відносно цієї
осі:
автомобіль може перекидатись відносно
осі, що проходить через центри контактів
зовнішніх коліс з дорогою. Складемо
рівняння моментів сил відносно цієї
осі:
![]() ,
,
де
![]() – сума нормальних реакцій дороги, що
діють на внутрішні колеса. В момент
початку перекидання внутрішні колеса
відриваються від дороги і сума
– сума нормальних реакцій дороги, що
діють на внутрішні колеса. В момент
початку перекидання внутрішні колеса
відриваються від дороги і сума
![]() .
Тоді
.
Тоді
![]() ;
;
Підставимо
значення
![]() і отримаємо вираз для критичної швидкості
по умовам перекидання:
і отримаємо вираз для критичної швидкості
по умовам перекидання:
![]() .
.
В
результаті дії сили
![]() може початись також ковзання шин по
дорозі в поперечному напрямку. Сума
поперечних реакцій
може початись також ковзання шин по
дорозі в поперечному напрямку. Сума
поперечних реакцій
![]() і
і
![]() дороги при цьому дорівнює сумі сил
зчеплення з дорогою всіх шин автомобіля:
дороги при цьому дорівнює сумі сил
зчеплення з дорогою всіх шин автомобіля:
![]() ,
,
де
![]() – коефіцієнт поперечного зчеплення
шин з дорогою.
– коефіцієнт поперечного зчеплення
шин з дорогою.
Звідси критична швидкість за умовами заносу:
![]() ;
;
Автомобіль може втратити стійкість і під час прямолінійного руху, якщо водій різко поверне керовані колеса.
Виникаюча при цьому відцентрова сила може швидко досягнути значення сили зчеплення шин з дорогою.
Під
час руху автомобіля по дорозі з поперечним
нахилом втрата стійкості можлива
внаслідок дії поперечної складової
сили тяжіння автомобіля
![]() .
Складемо рівняння моментів сил відносно
осі, що проходить через контакти шин
зовнішніх коліс з дорогою.
.
Складемо рівняння моментів сил відносно
осі, що проходить через контакти шин
зовнішніх коліс з дорогою.
![]() ;
;
В
момент початку перекидання реакція
![]() .
.
Тоді,
поділивши ліву й праву частину на
![]() маємо:
маємо:
![]() ;
;
Критичний кут по умовам перекидання на косогорі:
![]() ;
;
Можливість
автомобіля протистояти перекиданню
найбільше залежить від відношення
![]() ,
що називається коефіцієнтом поперечної
стійкості
,
що називається коефіцієнтом поперечної
стійкості
![]() .
.
Середні
значення цього коефіцієнта і відповідні
йому кути
![]() для автомобілів різних типів:
для автомобілів різних типів:
-


Легкові
0,9 – 1,2
(40о – 50о)
Вантажні
0,55 – 0,80
(30о – 40о)
Автобуси
0,50 – 0,60
(25о – 35о)
Критичний кут косогору по умовам занесення визначимо, спроектувавши всі сили на площину дороги:
![]() ;
;
Разом з тим, по умовам зчеплення шин з дорогою, сума поперечних реакцій в момент початку занесення:
![]() ;
;
отже: ![]() ;
;
![]() ;
;
Значить критичний кут косогору по умовам занесення:
![]() ;
;
Для забезпечення безпеки руху автомобіля по кривим малих радіусів влаштовують віраж, на якому проїжджа частина і обочина мають поперечний нахил до центру кривизни (односкатний поперечний профіль).
Занесення переднього та заднього мостів.
Поперечна стійкість автомобіля розглядалась за умовою, що при занесенні колеса обох мостів починають ковзання в поперечному напрямку одночасно. Звичайно починають ковзати колеса одного моста, внаслідок чого необхідно розглядати стійкість не всього автомобіля, а одного з його мостів.
Згідно
формули
![]() кочення колеса без ковзання можливе
лише при умові дотримання цієї нерівності.
Поперечна сила, яку можна прикласти до
колеса, не викликаючи його ковзання,
тим більша, чим більша сила зчеплення
і чим менша дотична реакція дороги.
Найбільш стійке в поперечному напрямку
ведене колесо, у якого дотична реакція
невелика в порівнянні з силою
кочення колеса без ковзання можливе
лише при умові дотримання цієї нерівності.
Поперечна сила, яку можна прикласти до
колеса, не викликаючи його ковзання,
тим більша, чим більша сила зчеплення
і чим менша дотична реакція дороги.
Найбільш стійке в поперечному напрямку
ведене колесо, у якого дотична реакція
невелика в порівнянні з силою
![]() .
Колесо, навантажене силою тяги, або
гальмівною силою гірше протистоїть
занесенню, чим ведене колесо. Якщо
дотична реакція досягла значення сили
зчеплення, то для того, щоб відбулось
бокове ковзання, достатньо прикласти
до колеса невелику поперечну силу.
.
Колесо, навантажене силою тяги, або
гальмівною силою гірше протистоїть
занесенню, чим ведене колесо. Якщо
дотична реакція досягла значення сили
зчеплення, то для того, щоб відбулось
бокове ковзання, достатньо прикласти
до колеса невелику поперечну силу.
Розглянемо
автомобіль у якого передні колеса
рухаються поступально із швидкістю
![]() ,
а задні, рухаючись зі швидкістю
,
а задні, рухаючись зі швидкістю![]() ,
ковзають в поперечному напрямку зі
швидкістю
,
ковзають в поперечному напрямку зі
швидкістю
![]() (а).
(а).

а – заднього; б – переднього; в – погашення заносу
Рисунок 19 – Занос мостів автомобіля
В
результаті цього задній міст переміщується
зі швидкістю
![]() ,
що викликає поворот автомобіля навколо
центра О, хоча передні колеса при цьому
знаходяться в нейтральному положенні.
Поперечна складова виникаючої при цьому
відцентрової сили
,
що викликає поворот автомобіля навколо
центра О, хоча передні колеса при цьому
знаходяться в нейтральному положенні.
Поперечна складова виникаючої при цьому
відцентрової сили
![]() діє в напрямку ковзання заднього моста,
підвищуючи швидкість
діє в напрямку ковзання заднього моста,
підвищуючи швидкість
![]() .
Це викликає подальше збільшення
відцентрової сили, в результаті чого
занесення прогресує. Тому небезпечне
занесення заднього, а не переднього
моста, (б) при якому поперечна складова
сили
.
Це викликає подальше збільшення
відцентрової сили, в результаті чого
занесення прогресує. Тому небезпечне
занесення заднього, а не переднього
моста, (б) при якому поперечна складова
сили
![]() направлена в бік, протилежний швидкості
бокового ковзання
направлена в бік, протилежний швидкості
бокового ковзання
![]() ,
а в результаті чого ковзання передніх
коліс автоматично припиняється і
автомобіль не втрачає стійкості. Щоб
усунути занесення заднього моста
необхідно зменшити дотичну реакцію на
ведучих колесах, припинивши гальмування
або зменшивши дотичну реакцію не ведучих
колесах, припинивши гальмування або
зменшивши подачу палива, і повернути
передні колеса в бік занесення, що
почалося. Якщо під час занесення передні
колеса зайняли нейтральне положення,
а центр повороту знаходився в точці О,
то після повороту передніх коліс він
зміниться в точку О1.
Радіус повороту при цьому збільшиться,
що зменшить відцентрову силу (в).
,
а в результаті чого ковзання передніх
коліс автоматично припиняється і
автомобіль не втрачає стійкості. Щоб
усунути занесення заднього моста
необхідно зменшити дотичну реакцію на
ведучих колесах, припинивши гальмування
або зменшивши дотичну реакцію не ведучих
колесах, припинивши гальмування або
зменшивши подачу палива, і повернути
передні колеса в бік занесення, що
почалося. Якщо під час занесення передні
колеса зайняли нейтральне положення,
а центр повороту знаходився в точці О,
то після повороту передніх коліс він
зміниться в точку О1.
Радіус повороту при цьому збільшиться,
що зменшить відцентрову силу (в).
Поворот передніх колі на надмірно великий кут може викликати ковзання задніх коліс у зворотній бік і рух автомобіля в напрямку, відповідному новому положенню керованих коліс. Тому зразу після припинення занесення їх слід повернути в нейтральне положення. Щоб уникнути втрати автомобілем стійкості, необхідно плавно зменшувати швидкість до початку повороту, особливо на вологій і слизькій дорозі.
Самостійна робота
Вплив конструктивних і експлуатаційних факторів на поперечну стійкість.
При
визначенні показників стійкості було
обумовлено, що автомобіль – це тверде
тіло, а в дійсності він являє собою
систему мас, з’єднаних шарнірами, або
пружинними елементами. Можна виділити
дві основні групи мас: підресорені
(кузов) і не підресорені (колеса, мости).
Центр тяжіння С
підресорених мас розташований на
відстані
![]() від переднього моста, на відстані
від переднього моста, на відстані
![]() від заднього і на висоті
від заднього і на висоті
![]() від дороги. Точка С
розташована вище центра тяжіння
автомобіля С1
і
від дороги. Точка С
розташована вище центра тяжіння
автомобіля С1
і
![]() .
Не підресорені маси веденого моста
звичайно менші, чим ведучого, тому у
задньопривідного автомобіля
.
Не підресорені маси веденого моста
звичайно менші, чим ведучого, тому у
задньопривідного автомобіля
![]() .
.

Рисунок 20 – Розташування вісі крену
Під дією поперечної сили шини і пружні елементі підвіски з одного боку автомобіля розвантажуються, а з іншого навпаки. В результаті кузов автомобіля нахиляється і повертається в поперечному напрямку.
Центром крену (переднім або заднім) називають точку, відносно якої переміщується поперечний переріз автомобіля, що проходить через передній або задній міст.
Віссю крену називають пряму ЕЕ, відносно якої повертається кузов при крені. Вона проходить через центр крену Е1 і Е2 передньої і задньої частини кузова.
Положення центру крену автомобіля з важільною підвіскою розглянемо на схемі:

Рисунок 21 – Визначення центру крену при важільній незалежній підвісці
При нерухомому кузові вертикальні коливання лівого колеса викличуть переміщення точок А і Б в напрямках перпендикулярних важелям. Миттєвий центр швидкостей колеса розташований в точці К, а В переміщується при цьому перпендикулярно KL. Якщо колесо не переміщується, а нахиляється кузов, то центр його крену теж знаходиться на ліній KL. Підвіска симетрична відносно вертикальної площини ГГ, таким чином центр крену Е знаходиться в площині ГГ і розташований в даному випадку нижче поверхні дороги. Підвіску з паралельним переміщенням коліс, можна розглядати як важільну, що має нескінченно довгі важелі. Центр крену при такій підвісці знаходиться на поверхні дороги. У автомобіля з підвіскою на поздовжніх листових ресорах центр крену знаходиться орієнтовно в площині, що проходить через середину верхнього корінного листа ресори. У легкових автомобілів з передньою незалежною і задньою залежною підвіскою вісь крену ЕЕ нахилена до дороги. У вантажівок, що мають обидві залежні підвіски вісь крену розташована паралельно дорозі.
Поперечна
сила
![]() ,
прикладена до центру тяжіння кузова,
створює на плечі крену
,
прикладена до центру тяжіння кузова,
створює на плечі крену
![]() момент, що викличе поперечний нахил
кузова. Визначимо кут крену при повороті
автомобіля на горизонтальній дорозі.
момент, що викличе поперечний нахил
кузова. Визначимо кут крену при повороті
автомобіля на горизонтальній дорозі.

Рисунок 22 – Схема до визначення кута крену кузова
До
центру тяжіння підресорних мас прикладені
сила тяжіння
![]() і
і
![]() .
Точка прикладення сили тяжіння
.
Точка прикладення сили тяжіння
![]() і відцентрової сили
і відцентрової сили
![]() не підресорених мас розташована на
висоті, рівній приблизно радіусу колеса
не підресорених мас розташована на
висоті, рівній приблизно радіусу колеса
![]() .
.
На
колеса внутрішнього боку автомобіля
діють реакції
![]() і
і
![]() ,
а на колеса зовнішньої –
,
а на колеса зовнішньої –
![]() і
і
![]() .
Під дією сили
.
Під дією сили
![]() кузов повертається відносно осі крену
на кут
кузов повертається відносно осі крену
на кут
![]() ,
який звичайно не перевищує 8 о
– 10 о,
тому можна вважати
,
який звичайно не перевищує 8 о
– 10 о,
тому можна вважати
![]() .
При малих кутах крену зміщення центру
тяжіння:
.
При малих кутах крену зміщення центру
тяжіння:
![]()
Момент
сил
![]() і
і
![]() врівноважують моменти пружних сил:
врівноважують моменти пружних сил:
![]() .
.
де
![]() – кутова жорсткість підвіски автомобіля.
Звідси:
– кутова жорсткість підвіски автомобіля.
Звідси:
 ,
(рад)
,
(рад)
Для
зменшення крену встановлюють стабілізатор
поперечної стійкості і тим самим
підвищують кутову жорсткість підвіски.
При кренах кузова збільшується можливість
перекидання автомобіля. Якщо при
визначенні швидкості
![]() і кута
і кута
![]() врахувати також і кут крену кузова, то
їх значення будуть на 10-15 % менші, ніж
без цього врахування.
врахувати також і кут крену кузова, то
їх значення будуть на 10-15 % менші, ніж
без цього врахування.
Автомобіль може втратити стійкість при гальмуванні через нерівномірний розподіл гальмових сил між колесами. Причому несправність передніх гальмових механізмів більш небезпечна, ніж задніх.
Поздовжня стійкість автомобіля.
У сучасних автомобілів центр тяжіння розташований низько і перекиданні в повздовжній площині практично неможливе. Можливе лише буксування задніх коліс, яке викличе сповзання автомобіля, наприклад, під час динамічного подолання авто потягом крутого підйому великої довжини.

Рисунок 23 – Схема до визначення максимального кута підйому, який долає автопотяг
Визначимо максимальний кут підйому, який при рівномірному русі може подолати автопотяг без буксування тягача. Приймемо, що сили опору кочення і повітря відсутні.
![]() ,
,
де
![]() – вага причепа;
– вага причепа;
![]() – висота розташування буксирного гаку;
– висота розташування буксирного гаку;
Максимальна
величина дотичної реакції обмежена
зчепленням шин з дорогою
![]() ;
;
Підставивши
в цю формулу значення
![]() і
і
![]() і поділивши обидві частини на
і поділивши обидві частини на
![]() одержимо вираз для максимального
(критичного) кута підйому, при якому
можливий рух автопотягу без буксування
ведучих коліс тягача:
одержимо вираз для максимального
(критичного) кута підйому, при якому
можливий рух автопотягу без буксування
ведучих коліс тягача:
![]() ;
;
Для
нового автомобіля
![]()
![]() ;
;
Критичний
кут підйому в більшій мірі залежить від
коефіцієнту зчеплення. Для автомобілів
при
![]() цей кут не перевищує 4
о
– 6
о,
а для автомобілів
цей кут не перевищує 4
о
– 6
о,
а для автомобілів
![]() він знаходиться в межах 10
о
– 15
о.
Цим пояснюється часті випадки буксування
тягачів з причепами на порівняно некрутих
підйомах.
він знаходиться в межах 10
о
– 15
о.
Цим пояснюється часті випадки буксування
тягачів з причепами на порівняно некрутих
підйомах.
Автомобіль
з усіма ведучими мостами може долати
круті підйоми без втрати повздовжньої
стійкості навіть на мокрих і слизьких
дорогах
![]() .
.
Лекція 9
Керованість автомобіля
Дорожня ситуація безперервно змінюється, вимагаючи від водія постійної готовності змінити характер руху автомобіля. Для цього автомобіль повинен мати властивості легко й швидко змінювати своє положення на дорозі під керуванням водія.
Керованість автомобіля оцінюють по таким показникам: критична швидкість по керованості, повертаємість, співвідношення кутів повороту керованих коліс, стабілізація керованих коліс і їх кутові коливання.
Критична швидкість по умовам керованості.
В
лекції 8 розглянуто автомобіль під час
руху на повороті. Керовані колеса
повернуті на кут
![]() .
До переднього мосту прикладена штовхаюча
сила Р,
складова якої Рх1,
паралельна керованим колесам, при
рівномірному русі рівна силі опору
кочення
.
До переднього мосту прикладена штовхаюча
сила Р,
складова якої Рх1,
паралельна керованим колесам, при
рівномірному русі рівна силі опору
кочення
![]() .
Поперечна складова сили Р:
.
Поперечна складова сили Р:
![]() ;
;
На
передній міст діє також відцентрова
сила передньої частини автомобіля,
направлена в напрямку радіуса
![]() повороту середини переднього моста:
повороту середини переднього моста:
![]() ,
,
де
![]() – маса, що припадає на передній міст
автомобіля, кг;
– маса, що припадає на передній міст
автомобіля, кг;
![]() – швидкість середини переднього моста,
м/с;
– швидкість середини переднього моста,
м/с;
але
![]() і
і ![]() ,
,
тому ![]() ;
;
Сили
![]() і
і
![]() намагаються викликати бокове ковзання
керованих коліс. Щоб колеса котились
без ковзання необхідно дотримання
наступної умови:
намагаються викликати бокове ковзання
керованих коліс. Щоб колеса котились
без ковзання необхідно дотримання
наступної умови:
![]() .
.
Тому ковзання коліс найбільш можливе при великій швидкості. Критичною швидкістю по умовам керованості називають швидкість, з якою автомобіль може рухатись на повороті без поперечного ковзання керованих коліс. Цю швидкість визначимо з попередніх виразів:
![]() .
.
Якщо
швидкість автомобіля більше швидкості
![]() ,
то керовані колеса при повороті
проковзують в поперечному напрямку і
поворот коліс не змінить напрямку руху
автомобіля.
,
то керовані колеса при повороті
проковзують в поперечному напрямку і
поворот коліс не змінить напрямку руху
автомобіля.
На
дорогах з твердим покриттям коефіцієнт
зчеплення
![]() звичайно набагато більший коефіцієнт
опору кочення
звичайно набагато більший коефіцієнт
опору кочення
![]() ,
тому автомобіль легко зберігає
керованість. При русі по дорогам з
нерівним зледенілим покриттям, а також
по піску або снігу значення коефіцієнту
,
тому автомобіль легко зберігає
керованість. При русі по дорогам з
нерівним зледенілим покриттям, а також
по піску або снігу значення коефіцієнту
![]() і
і
![]() близькі, що приводить до зниження
критичної швидкості. Якщо
близькі, що приводить до зниження
критичної швидкості. Якщо
![]() ,
то підкорінний вираз дорівнює нулю, і
автомобіль може повертатись з дуже
малою швидкістю. Якщо
,
то підкорінний вираз дорівнює нулю, і
автомобіль може повертатись з дуже
малою швидкістю. Якщо
![]() ,
то
,
то
![]() стає уявною величиною і автомобіль стає
некерованим. При повному ковзанні
передніх коліс, наприклад, в результаті
гальмування, поперечна реакція виникнути
не може, і автомобіль втрачає керованість.
стає уявною величиною і автомобіль стає
некерованим. При повному ковзанні
передніх коліс, наприклад, в результаті
гальмування, поперечна реакція виникнути
не може, і автомобіль втрачає керованість.
Поворотність автомобіля.
Поворотність – це властивість автомобіля змінювати напрямок руху без повороту керованих коліс. Існує дві причини поворотності: - увод коліс, викликаний поперечною еластичністю шин і поперечний крен кузова, пов’язаний еластичністю підвіски. Відповідно розрізняють шинну і кренову поворотність. Для забезпечення невеликих значень поворотності дещо зменшують тиск в шинах передніх коліс в порівнянні з задніми. Окрім цього, центр тяжіння автомобіля зміщують в сторону переднього моста, що збільшує частину відцентрової сили, діючої на керовані колеса.
Співвідношення кутів повороту керованих коліс.
При повороті автомобіля вектори швидкостей центрів всіх коліс перпендикулярна радіусам, проведеним з центру повороту.

Рисунок 24 – Відношення кутів повороту коліс, які керуються
У автомобіля, що має жорсткі шини вектори швидкостей співпадають з серединними площинами коліс і центр повороту „0” знаходиться на продовженні осі заднього моста.
Співвідношення
між кутами повороту
![]() і
і
![]() зовнішнього і внутрішнього коліс
визначимо з трикутників ОАВ і ОСД:
зовнішнього і внутрішнього коліс
визначимо з трикутників ОАВ і ОСД:
![]() ;
;
![]() .
.
Різниця
к![]() ,
,
де
![]() – відстань між центрами шворнів,
– відстань між центрами шворнів,
![]() .
.
З
рівняння виходить, що колесо внутрішнє
по відношенню до центру повороту повинно
бути повернуте на більший кут, ніж
зовнішнє. Щоб забезпечити необхідне
співвідношення між кутами повороту
керованих коліс їх з’єднують рульовою
трапецією. Однак точного виконання
рівняння трапеція не забезпечує. Тому
при їх проектуванні вважають достатнім,
якщо при значеннях
![]() розбіжність між теоретичним і дійсним
значенням
розбіжність між теоретичним і дійсним
значенням
![]() не перевищує
не перевищує
![]() ,
а при
,
а при
![]() не більше
не більше
![]() .
.
У автомобілів з еластичними шинами по мірі збільшення швидкості вектори швидкостей центрів коліс н е співпадають з серединними площинами їх. Тому співвідношення кутів повороту керованих коліс повинно змінюватись автоматично, що значно ускладнить конструкцію автомобіля.
Коливання керованих коліс.
Під час руху керовані колеса, що мають залежну підвіску, можуть коливатись разом з переднім мостом у вертикальній площині, а разом з рульовою трапецією – навколо шворнів (осей повороту) в горизонтальній площині.
Кутові
коливання керованих коліс навколо
шворнів недопустимі, оскільки деталі
ходової частини і рульового керування
сприймають при цьому значні знакозмінні
динамічні навантаження, а коливання з
великою амплітудою призводять до втрати
керованості. Найбільш небезпечними є
стійкі коливання коліс, тобто такі, які
безперервно повторюються (самозбуджуються).
У випадку нахилу керованих коліс у
вертикальній площині, наприклад, при
наїзді одного з них на нерівність дороги,
виникає момент
![]() ,
що діє в горизонтальній площині. Під
дією цього моменту колеса повертаються
відносно шворнів, стикаючи амортизаційні
пружини. Поворот коліс викликає появу
моменту
,
що діє в горизонтальній площині. Під
дією цього моменту колеса повертаються
відносно шворнів, стикаючи амортизаційні
пружини. Поворот коліс викликає появу
моменту
![]() ,
що діє у вертикальній площині і намагається
збільшити нахил коліс. Таким чином
перекіс переднього моста викликає
кутові коливання коліс, які в свою чергу
посилюють перекіс моста. Виникнувши,
коливання продовжуються і після того,
як колесо з’їхало
з нерівності.
,
що діє у вертикальній площині і намагається
збільшити нахил коліс. Таким чином
перекіс переднього моста викликає
кутові коливання коліс, які в свою чергу
посилюють перекіс моста. Виникнувши,
коливання продовжуються і після того,
як колесо з’їхало
з нерівності.

Рисунок 25 – Зв’язок між вертикальним і кутовим хитаннями коліс
Основним засобом зменшення кутових коливань коліс є застосування незалежної передньої підвіски. В цьому випадку при вертикальних переміщеннях керованих коліс не відбувається більшого їх нахилу.
Розглянуті
коливання є власними, вони залежать
тільки від характеристики пружинних
елементів, моментів інерції і мас
окремих деталей. Окрім власних коливань
можуть виникати також вимушені коливання,
викликані періодично діючою збуджуючою
силою. Така сила може, наприклад, виникнути
внаслідок дисбалансу (неврівноваженості)
коліс. При коченні неврівноваженого
колеса з’являється
відцентрова сила
![]() ,
яку можна розкласти на вертикальну силу
,
яку можна розкласти на вертикальну силу
![]() і горизонтальну
і горизонтальну
![]() .
Під дією сили
.
Під дією сили
![]() колеса намагається повернутись відносно
шворня, а під дією сили
колеса намагається повернутись відносно
шворня, а під дією сили
![]() - переміститись у вертикальному напрямку.
Оскільки при коченні колеса напрямок
сили
- переміститись у вертикальному напрямку.
Оскільки при коченні колеса напрямок
сили
![]() і
і
![]() змінюється, то виникає „виляння”
колеса. Найбільш несприятливий випадок,
коли обидва колеса мають дисбаланс і
неврівноважені ділянки розташовані в
одній площині, але з різних боків від
осі обертання коліс. В цьому випадку
крутні моменти, які діють на колеса,
складаються і кутові коливання особливо
сильні.
змінюється, то виникає „виляння”
колеса. Найбільш несприятливий випадок,
коли обидва колеса мають дисбаланс і
неврівноважені ділянки розташовані в
одній площині, але з різних боків від
осі обертання коліс. В цьому випадку
крутні моменти, які діють на колеса,
складаються і кутові коливання особливо
сильні.
Вихляння керованих коліс може бути обумовлено наявністю подвійного зв’язку цих коліс з кузовом автомобіля (через рульовий привід і підвіску).

Рисунок 26 – Сили, які діють на нерівномірність коліс.
Схема виникнення обертального моменту.
Стабілізація керованих коліс.
Стабілізацією керованих коліс називають їх властивість зберігати нейтральне положення і автоматично в нього повертатись. Вимірювачами стабілізації при виході автомобіля з повороту служать стабілізуючі моменту і кутова швидкість рульового колеса при повертанні його в центральне положення.
Стабілізуючий момент виникає завдяки поздовжньому і поперечному нахилу шворнів, а також внаслідок поперечної еластичності шини. На стабілізацію керованих коліс в основному впливають поперечна еластичність шини і поздовжній нахил шворня. Від поперечного нахилу шворня стабілізуючий момент практично залежить лише при русі по кривим малого радіуса.
Лекція 10
Прохідність автомобіля
Геометричні показники прохідності.
Прохідність залежить від багатьох факторів, основними з яких є опорно-тягові властивості і геометричні параметри автомобіля, а також конструкції окремих агрегатів трансмісії (диференціала, коробки передач ті інше). На прохідність суттєво впливає стиль водіння автомобіля.
В залежності від прохідності автомобілі умовно поділяють на три групи. В основу класифікації покладена колісна формула, в якій перша цифра відповідає загальній кількості коліс, а друга – числу ведучих коліс.
До першої групи відносять автомобілі обмеженої (нормальної) прохідності 4х2 і 6х2; до другої – підвищеної прохідності 4х4, 6х6; до третьої – автомобілі високої прохідності типу 8х8, що мають спеціальну компоновку. При спеціальній конструкції автомобіля 4х4 і 6х6 мають таку ж прохідність, що й автомобілі третьої групи.
Геометричні показники, що характеризують прохідність в горизонтальній і вертикальній площині такі:
Дорожній
просвіт – відстань
![]() між найнижчою точкою авто і площиною
дороги.
між найнижчою точкою авто і площиною
дороги.

Рисунок 27 – Геометричні показники прохідності автомобіля
Кути
переднього
![]() і заднього
і заднього
![]() звису, а також передній
звису, а також передній
![]() і задній
і задній
![]() звис характеризують прохідність по
нерівним дорогам при наїзді на перешкоду
і з’їзду з неї, переїзди через канави.
звис характеризують прохідність по
нерівним дорогам при наїзді на перешкоду
і з’їзду з неї, переїзди через канави.
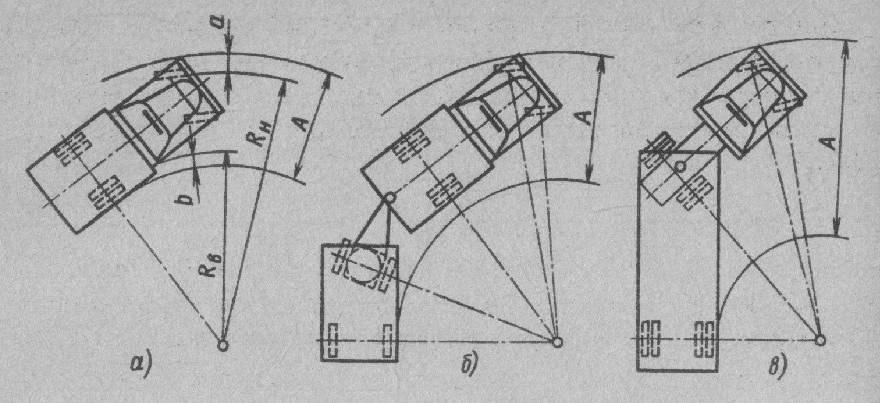
а – одного автомобіля; б – тягача з причепом; в – тягача з напівпричепом
Рисунок 28 – Показники маневрування
Поздовжній
радіус
![]() прохідності визначає контури, перешкоди,
яку не чіпляючи може подолати автомобіль.
Зменшуючи, наприклад, базу можна зменшити
прохідності визначає контури, перешкоди,
яку не чіпляючи може подолати автомобіль.
Зменшуючи, наприклад, базу можна зменшити
![]() .
Значення
.
Значення
![]() для деяких типів автомобіля (м).
для деяких типів автомобіля (м).
Легковий 4х2 3,2 – 8,3
Вантажівки 4х2 2,7 – 5,5
Вантажівки 4х4 6х4 1,9 – 3,6
Властивість
автомобіля розвертатись на мінімальній
площі називають маневреністю. Вона
характеризує прохідність автомобіля
в горизонтальній площині. Показники
маневреності такі: мінімальний радіус
повороту зовнішнього переднього колеса
![]() ,
ширина смуги руху А, яку займає автомобіль
при повороті і максимальний вихід
окремих частин автомобіля за межі
траєкторії зовнішнього переднього і
внутрішнього заднього коліс.
,
ширина смуги руху А, яку займає автомобіль
при повороті і максимальний вихід
окремих частин автомобіля за межі
траєкторії зовнішнього переднього і
внутрішнього заднього коліс.
Максимальну ширину смуги руху визначають за формулою:
![]() ;
;
![]() – мінімальний радіус повороту внутрішнього
заднього колеса.
– мінімальний радіус повороту внутрішнього
заднього колеса.
При буксируванні причепів маневреність автомобіля погіршується, оскільки причеп зміщується в напрямку центра повороту і ширина смуги руху збільшується.
Опорні і тягові показники прохідності.
Тяговими показниками прохідності є максимальна сила тяги і динамічний фактор, а опорно-зчіпними – зчіпна вага, тиск коліс на дорогу і коефіцієнт зчеплення.
Для
подолання бездоріжжя автомобілі повинні
мати більшу силу тяги і більший динамічний
фактор. Для їх збільшення в трансмісію
автомобілів підвищеної прохідності
вводять додаткову коробку передач
(демультиплікатор). Зчіпну вагу
![]() можна збільшити, збільшуючи число
ведучих коліс, або зміщуючи центр тяжіння
в сторону ведучого моста. Відношення
можна збільшити, збільшуючи число
ведучих коліс, або зміщуючи центр тяжіння
в сторону ведучого моста. Відношення
![]() для легковиків знаходиться в межах
0,45-0,5, а для вантажівок 0,65-0,75.
для легковиків знаходиться в межах
0,45-0,5, а для вантажівок 0,65-0,75.
Максимальний
динамічний фактор для вказаних типів
авто знаходиться в межах 0,25-0,35. Для
автомобілів з усіма ведучими мостами
![]() ,
а
,
а
![]() .
.
Основним показником прохідності авто по дорогах з м’яким покриттям є тиск (Па) коліс на дорогу:
![]() ;
;
![]() – вага авто, що сприймається колесом,
(Н);
– вага авто, що сприймається колесом,
(Н);
![]() – площа контакту, (м2).
– площа контакту, (м2).
При
зменшенні тиску повітря в шинах площа
контакту збільшується, що зменшує тиск
коліс на дорогу. Цим можна скористатись
при русі по вологій сніговій цілині,
піску, заболоченій луговині. При русі
по м’якому вологому ґрунту зниження
тиску коліс на дорогу може зменшити
прохідність, оскільки ведучі колеса
при цьому будуть гірше видавлювати
вологу в контакті шини з опорною поверхнею
і починають буксувати. Необхідно
регулювати зчеплення коліс з дорогою
тиском в шинах, або встановленням коліс
зі збільшеним діаметром. Коефіцієнт
зчеплення шин з дорогою
![]() визначає його прохідність, по вологим
ґрунтам і слизькій дорозі.
визначає його прохідність, по вологим
ґрунтам і слизькій дорозі.
Вплив конструкції автомобіля на його прохідність.
Ведені
колеса значно гірше долають вертикальні
перешкоди, ніж ведучі. Розглянемо схему
сил, що діють на ведене (переднє) колесо
автомобіля при подоланні ним вертикальної
перешкоди висотою
![]()

а – ведуче колесо; б – ведене колесо.
Рисунок 29 – Схема сил, які діють на переднє колесо під час долання ними вертикальної перешкоди
На
колесо діє штовхаюче зусилля
![]() ,
що сприймається переднім колесом від
рами і реакція перешкоди R.
З умови рівноваги:
,
що сприймається переднім колесом від
рами і реакція перешкоди R.
З умови рівноваги:
![]() ;
; ![]() ;
;
Сили, що діють на колесо, зв’язані між собою рівняннями:
![]() ;
; ![]() ;
; ![]() ;
;
Тоді
![]() ;
;
З
отриманого виразу видно, що при
![]() сила
сила
![]() є нескінченно великою, і автомобіль не
зможе подолати таку перешкоду навіть
при великій силі тяги на ведучих колесах.
На ведуче переднє колесо крім сил
є нескінченно великою, і автомобіль не
зможе подолати таку перешкоду навіть
при великій силі тяги на ведучих колесах.
На ведуче переднє колесо крім сил
![]() і
і
![]() діє також тяговий момент
діє також тяговий момент
![]() ,
в наслідок чого з’являється
тягове зусилля
,
в наслідок чого з’являється
тягове зусилля
![]() .
Розкладемо
.
Розкладемо
![]() на горизонтальну
на горизонтальну
![]() і вертикальну
і вертикальну
![]() складові.
складові.
В
результаті дії сил
![]() і
і
![]() виникають реакції
виникають реакції
![]() і
і
![]() .
Спроектувавши всі сили на вертикальну
і горизонтальну вісі отримаємо:
.
Спроектувавши всі сили на вертикальну
і горизонтальну вісі отримаємо:
![]() ;
; ![]() ;
;
Виникнення
додаткової сили
![]() дозволяє ведучому колесу подолати
перешкоду з висотою, що дорівнює радіусу
колеса, а зусилля
дозволяє ведучому колесу подолати
перешкоду з висотою, що дорівнює радіусу
колеса, а зусилля
![]() зменшує складову сили опору руху
зменшує складову сили опору руху
![]() .
.
Колія передніх і задній коліс.
При утворенні колії під час руху по м’яким ґрунтам виникає значний опір коченню колеса. Тому у випадку неспівпадіння колії задніх коліс з передньою, опір руху більший (передні колеса одинарні, задні подвоєні).
Підвіска.
Рух автомобілів 6х4 і 6х6 по бездоріжжю без відриву коліс від ґрунту може бути обмежений допустимим перекосом їх мостів, що залежить від типів підвіски. При незалежній і балансирній підвісці допускається більший перекіс мостів, що збільшує прохідність.
Диференціал.
При пробуксуванні одного з ведучих коліс (наприклад лівого) диференціал розподіляє крутний момент між колесами наступним чином:
![]() ;
; ![]() ,
,
![]() – крутний
момент на веденому зубчатому колесі
головної передачі.
– крутний
момент на веденому зубчатому колесі
головної передачі.
![]() – момент
тертя в диференціалі, що виникає через
відносний рух його деталей.
– момент
тертя в диференціалі, що виникає через
відносний рух його деталей.
З точки зору прохідності тертя в диференціалі є корисним, оскільки дозволяє передавати більший крутний момент колесо, що не буксує і менший – на те що буксує, а це сприяє припиненню буксування. Сумарна сила тяги на двох ведучих колесах при цьому досягає максимального значення:
![]() ,
,
де
![]() – сила тяги на колесі з меншим зчепленням.
– сила тяги на колесі з меншим зчепленням.
Диференціал з малим внутрішнім тертям розподіляє крутний момент по на півосях приблизно порівну, і реалізація моменту обмежується буксуванням колеса, що знаходиться на ґрунті з меншим коефіцієнтом зчеплення. Загальна сила тяги на ведучих колесах визначається колесом, яке має менше зчеплення з дорогою і може бути недостатньою для подолання опору руху. Тому при встановленні звичайного диференціалу різко погіршується прохідність автомобіля. Тертя в ньому невелике, внаслідок чого сумарна сила тяги збільшується лише на 4-6 %. В черв’ячному і кулачковому диференціалах, які встановлюють на автомобілі підвищеної і високої прохідності, тертя значно більше і сила тяги зростає на 10-15 %. Самоблокувальні диференціали збільшують прохідність по слизьким ґрунтам, оскільки діють автоматично і дозволяють долати слизькі ділянки без втрати автомобілем кінетичної енергії. Сумарна сила тяги при блокуванні диференціала під час руху збільшується на 20-25 %, оскільки різниця між коефіцієнтами зчеплення під лівим і правим ведучим колесами порівняно невелика.
Регулювання тиску повітря в шинах.
Автомобілі, що мають централізовану систему регулювання тиску в шинах, всіх інших рівних можливостях мають підвищену прохідність при русі на м’яких ґрунтах.
Зниження швидкості руху.
Встановлення на автомобіль гідротрансформатора, роздавальної коробки, електромеханічної трансмісії сприяє підвищенню його прохідності по м’яких і вологих ґрунтах, що дозволяє зменшити швидкість до 0,5-1,5 км/год. і забезпечити успішне рушання з місця автомобіля в умовах бездоріжжя.
Лекція 11