

лабораторная работа / ТАУлаба / лаба3
.doc
СИНТЕЗ СИСТЕМЫ ОПТИМАЛЬНОГО УПРАВЛЕНИЯ МЕТОДОМ ДИНАМИЧЕСКОГО ПРОГРАММИРОВАНИЯ
Цель проведения лабораторной работы
Изучение методов и приобретение навыков синтеза и моделирования системы оптимального управления в условиях известного вектора состояния.
1п.
Схема ЭДПТ как ОУ


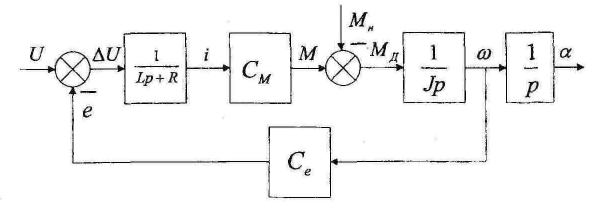
Структурная схема ЭДПТ
L = 1,102 мГн
R = 0,144 Ом
I = 0,049 кг*м2
Ce = 0,812
2п
В пространстве состояний
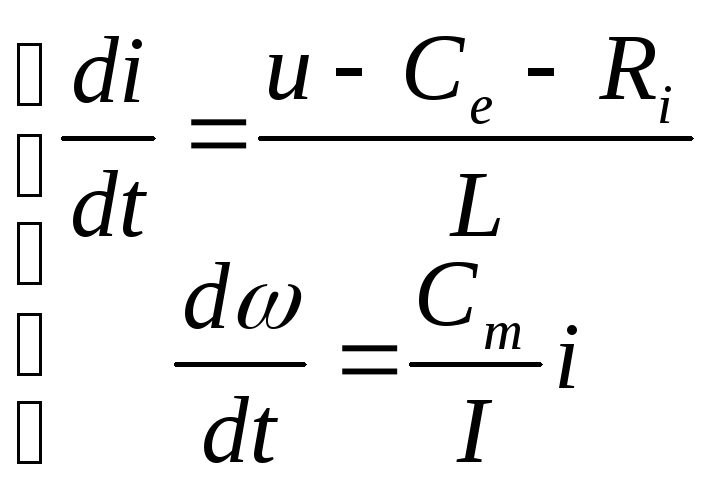
x1 =
i x2 =![]()

a11 = - R/L a12 = - Ce/L b1 = 1/L
a21= Cm/I a22 = 0 b2 = 0
Матрица поведения
![]()
![]()
3п.
ОУ в базисе интеграла
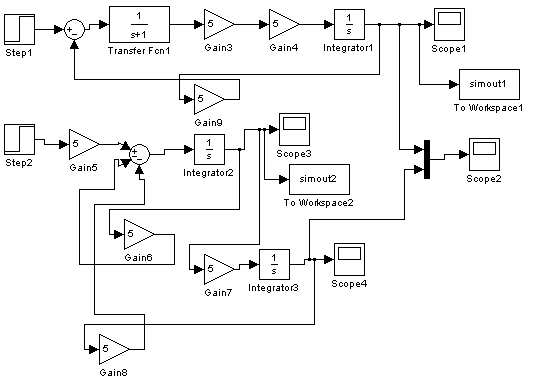
4п.
Постановка задачи оптимального управления
ОУ:
![]() = -130,67x1
- 736,84x2
+ 907,44u
= -130,67x1
- 736,84x2
+ 907,44u
![]() =
16,57x1
=
16,57x1
Критерий качества:
![]()
Синтез линейного квадратичного регулятора
Функционал качества имеет вид:
![]()
![]() R = 1
R = 1
u* = - Gx
Решение находится из уравнения Риккати:
>> A=[-130.67 -736.84; 16.57 0]
A =
-130.6700 -736.8400
16.5700 0
>> B=[907.44; 0]
B =
907.4400
0
>> Q=[1 0; 0 1]
Q =
1 0
0 1
>> [P,L,G]=care(A,B,Q)
P =
0.0010 0.0005
0.0005 0.0722
L =
-903.1297
-21.4466
G =
0.8749 0.4762
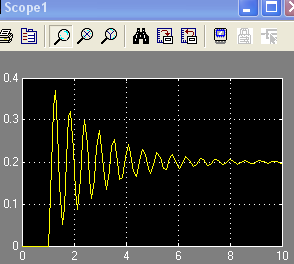
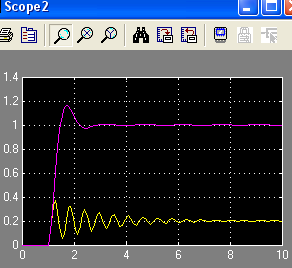
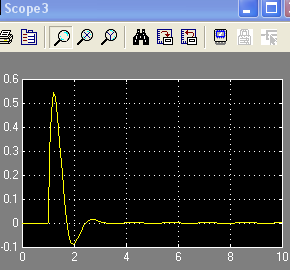
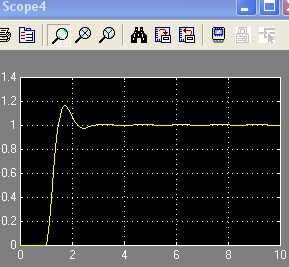
Отсюда общая структура оптимального закона управления:
u* = - 0,8749x1 – 0,4762x2
Выводы. В данной лабораторной работе изучили методы и приобрели навыки синтеза и моделирования системы оптимального управления в условиях известного вектора состояния.