

лабораторная работа / ТАУлаба / лаба2
.docАНАЛИЗ И МОДЕЛИРОВАНИЕ ДИСКРЕТНОЙ СИСТЕМЫ УПРАВЛЕНИЯ
Цель проведения лабораторной работы
• овладение методами математического описания и анализа дискретных систем управления техническими объектами;
• приобретение навыков имитационного моделирования дискретных систем с помощью Simulink.
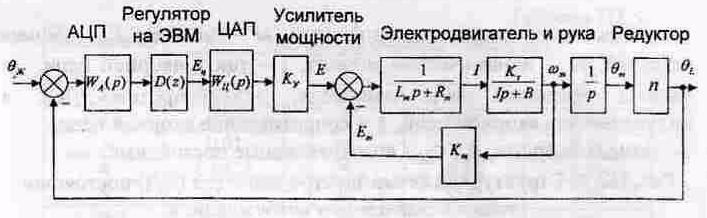
Цифровая система управления роботом
1п.

1) Математическая модель системы управления роботом
2п.
T0=0,005
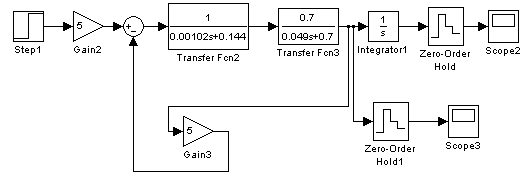
2) Дискретная СУ роботом
3п.
Z-преобразования. Получим передаточную функцию системы:
![]()
Для получения W(z):
>> k=1.21; T0=0.005;
>> den=[1.72*exp(-5) 0.0027 1]
den =
0.0116 0.0027 1.0000
>> Wp=tf(k,den);
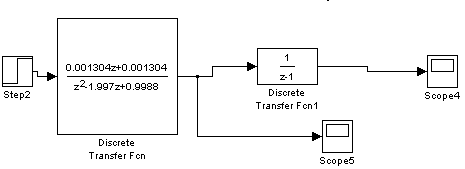
>> Wz=c2d(Wp,T0)
Transfer function:
0.001304 z + 0.001304
----------------------
z^2 - 1.997 z + 0.9988
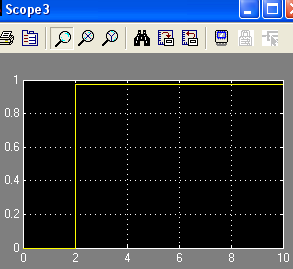
Осуществление выборки времени: 0.005

4п.
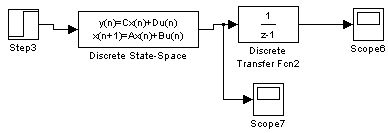
Описание системы в пространстве состояний
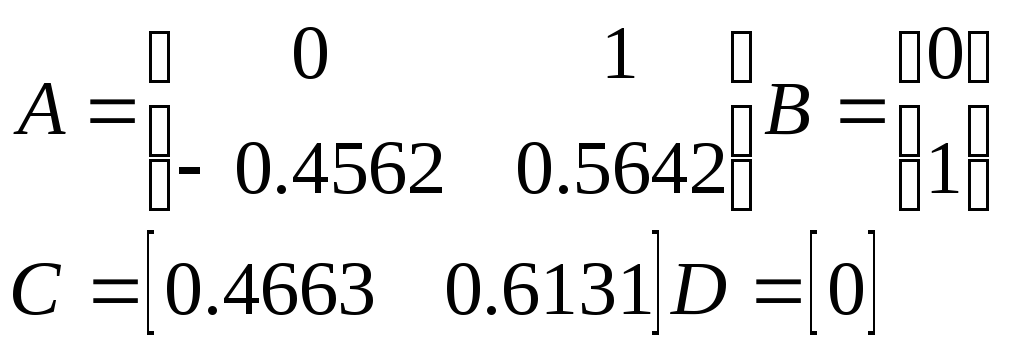

5п.
Рушить разностные уравнения
![]()
Для угловой скорости:
y[n] = 0.6131u[n-1] + 0.4663u[n-2] + 0.5642y[n-1] - 0.4562y[n-2]
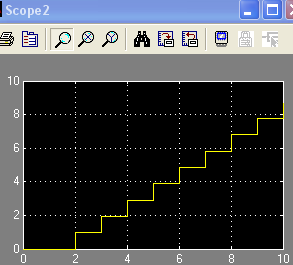
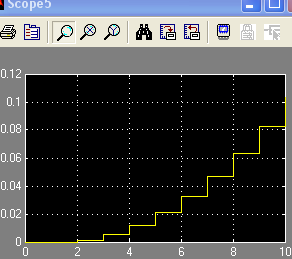
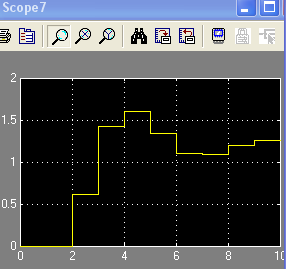
Решение разностного уравнения:

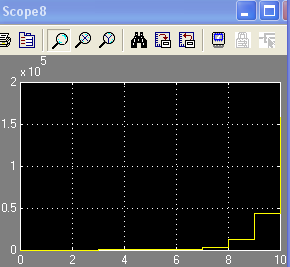
6п.
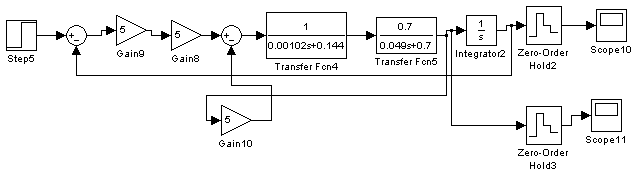
Синтез цифрового регулятора
Выводы. В данной лабораторной работе овладели методами математического описания и анализа дискретных систем управления техническими объектами, приобрели навыки имитационного моделирования дискретных систем с помощью Simulink.