

лабораторная работа / sintez_optimalnyh_sistem_s_ispolzovaniem_principa_maksimuma
.doc
Министерство образования и науки Российской Федерации
Федеральное агентство по образованию
ИРКУТСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ
Факультет кибернетики
Кафедра Автоматизированных Систем
ОТЧЁТ
к лабораторной работе по дисциплине
«Теория оптимального управления»
|
|
|
«Синтез оптимальных систем с использованием принципа максимума» |
наименование темы
|
Выполнил |
|
АСУ-06-1 |
|
|
|
Семигузов Е.Ю. |
|
|
|
шифр группы |
|
подпись |
|
Ф.И.О. |
|
Проверил |
|
|
|
|
|
|
|
|
|
должность |
|
подпись |
|
Ф.И.О. |
Иркутск
Оглавление:
1. Цель работы. 3
2. Функциональная схема системы управления с данными варианта 3
3. Процесс вычисления ,. 3
4. Графики процесса перехода спутника из заданного положения в нулевое. 6
5. Алгоритм работы системы управления. 6
6. Листинг программы. 7
7. Список литературы. 7
-
Цель работы.
Ознакомление с методикой синтеза оптимальных систем регулирования с использованием средств вычислительной техники.
-
Функциональная схема системы управления с данными варианта
Функциональная схема системы управления представлена на рис. 1.

Момент
инерции спутника
![]() .
Исполнительными органами управления
являются реактивные двигатели с
регулируемой тягой, развивающие
максимальный момент
.
Исполнительными органами управления
являются реактивные двигатели с
регулируемой тягой, развивающие
максимальный момент
![]() При оптимальном управлении найти время,
необходимое для перехода спутника в
установившееся нулевое состояние, если
в начальный момент времени его отклонение
составляло 300°, а угловая скорость -40
градс-1. Возмущения
отсутствуют. Задачу решить, используя
принцип максимума Л.С. Понтрягина.
При оптимальном управлении найти время,
необходимое для перехода спутника в
установившееся нулевое состояние, если
в начальный момент времени его отклонение
составляло 300°, а угловая скорость -40
градс-1. Возмущения
отсутствуют. Задачу решить, используя
принцип максимума Л.С. Понтрягина.
-
Процесс вычисления
 ,
, .
.
Второй закон Ньютона для вращательного движения:
![]()
Уравнения движения спутника заданы и при отсутствии возмущений имеют вид
![]()
По
условию задачи момент
![]() должен
быть сформирован так, чтобы спутник
переходил из любого отклоненного
положения в нормально ориентированное
за минимальное время.
должен
быть сформирован так, чтобы спутник
переходил из любого отклоненного
положения в нормально ориентированное
за минимальное время.
Поскольку
тяга реактивных исполнительных двигателей
конечна, то управляющий момент
![]() ограничен
ограничен
![]()
Для решения задачи преобразуем уравнение (1), введя обозначения

Тогда уравнение (1) запишется в виде
![]()
где
![]() нормированная
функция управления, модуль которой
нормированная
функция управления, модуль которой
![]() Сформируем функцию
Сформируем функцию
![]()
Для совокупности уравнений (2)
![]()
Таким
образом, оптимальное по быстродействию
управление будет осуществляться в том
случае, если регулятор будет переключать
исполнительное устройство по релейному
закону в соответствии со знаком
вспомогательной функции
![]() Для того чтобы найти
Для того чтобы найти
![]() запишем
запишем

Интегрируя эти уравнения, получим
![]()
где
![]() постоянные
интегрирования.
постоянные
интегрирования.
Подставив
полученные
![]() в
уравнение (4) получим:
в
уравнение (4) получим:
![]()
Максимум
этой функции с учетом ограничения на
управляющий сигнал
![]() и обеспечивает оптимальность системы
по быстродействию. Очевидно, что при
наложенных ограничениях максимум
и обеспечивает оптимальность системы
по быстродействию. Очевидно, что при
наложенных ограничениях максимум
![]() имеет место, если управляющий сигнал
имеет место, если управляющий сигнал
![]() формируется исходя из алгоритма
формируется исходя из алгоритма
![]()
Управляющий
сигнал
![]() должен менять знак при выходе изображающей
точки на линию переключения:
должен менять знак при выходе изображающей
точки на линию переключения:

Уравнение линии переключения:
![]()
Подставляя числовые значения, получим:

Так
как
![]() ,
то
,
то
![]()
Найдем точку пересечения траектории спутника до переключения и линии переключения.
Уравнение
параболы до переключения было - Из этого
уравнения необходимо найти
![]() ,
подставив в него начальные условия:
,
подставив в него начальные условия:
![]()
Теперь можно найти точку пересечения этой линии и линии переключения, приравняв оба уравнения:
![]()
![]()
Подставив в уравнение линии переключения, получим:
![]()
Так,
как
![]() ,
то
,
то ![]() .
.
Найдем время движения до переключения, учитывая, что , получим:

Общее время
![]()
-
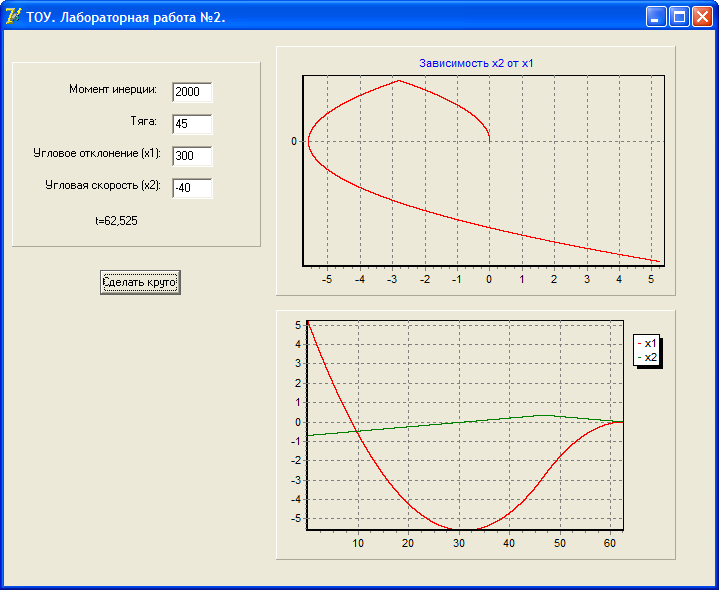
Графики процесса перехода спутника из заданного положения в нулевое.
-
Алгоритм работы системы управления.
1) Вычисляем скорость переключения при данном x1.
2) Устанавливаем
значение μ по следующему правилу:

3) Рассчитываем
новые значения x1 и
x2 следующим
образом:
![]()
![]()
4) Проверяем, равны ли x1 и x2 нулю. Если да, то завершение работы алгоритма, иначе возвращаемся к пункту 1.
-
Листинг программы.
var
x1,x2,dt,J,M,k,v_p,Summdt,mu:real;
begin
Series1.Clear;
Series2.Clear;
Series3.Clear;
x1:=StrToFloat(Edit3.Text)*pi/180;
x2:=StrToFloat(Edit4.Text)*pi/180;
J:=StrToFloat(Edit1.Text);
M:=StrToFloat(Edit2.Text);
k:=M/J;
dt:=0.001;
Summdt:=0;
repeat
if x1>=0 then
v_p:=-sqrt(2*k*x1)
else
v_p:=sqrt(abs(2*k*x1));
x2:=x2+dt*k*mu;
if x2<v_p then
mu:=1;
if x2>v_p then
mu:=-1;
if x2=v_p then
begin
if x2<0 then
mu:=1;
if x2>0 then
mu:=-1;
end;
x1:=x1+x2*dt;
Summdt:=Summdt+dt;
Series1.AddXY(x1,x2);
Series2.AddXY(Summdt,x1);
Series3.AddXY(Summdt,x2);
until (abs(x2)<0.001)and(abs(x1)<0.001);
Label5.Caption:='t='+FloatToStr(RoundTo(Summdt,-4));
-
Список литературы.
1. Куцый Н.Н. Теория оптимального управления. Лабораторный практикум: Лабораторные работы № 1,2. – Иркутск, изд-во Иркутск. гос. технич. ун-та, 2001. – 25с.