Глава 5
5.11.
а) 10; б)
![]() .
5.12. 137. 5.13. 39. 5.15. С(1;6).
5.16. А(-3;1). 5.17. (-1;8), (1;9), (3;10).
5.18. (1;4) и (13;16)
.
5.12. 137. 5.13. 39. 5.15. С(1;6).
5.16. А(-3;1). 5.17. (-1;8), (1;9), (3;10).
5.18. (1;4) и (13;16)
5.19.
![]() 5.20
5.20
![]() ,
D и E
лежат.
,
D и E
лежат.
5.21.
![]() 5.22.
5.22.
![]() 5.23.
5.23.
![]() .
.
5.24.
![]() 5.25.
5.25.
![]() ,
,
![]() .
5.26.
.
5.26.
![]() .
.
5.27.
![]() . 5.28.
. 5.28.
![]() .
.
5.30.
1)
![]() , 2)
, 2)
![]() .
5.31.
.
5.31.
![]() 5.32.
5.32.
![]() 5.33. 1)
5.33. 1)![]() ,
2)
,
2)
![]() ,
3)
,
3)
![]() ,
4)
,
4)
![]() .
5.34. Точки A и C
лежат на прямой, точка B
не лежит. 5.35. 1)
.
5.34. Точки A и C
лежат на прямой, точка B
не лежит. 5.35. 1)
![]() ,
2)
,
2)
![]() ,
3)
,
3)![]() ,
4)
,
4)
![]() .
5.36. А(1;2). 5.37. 1)
.
5.36. А(1;2). 5.37. 1)
![]() ,
2)
,
2)
![]() ,
3)
,
3)
![]() .
5.38. 1)
.
5.38. 1)
![]() ,
2)
,
2)
![]() ,
3)
,
3)
![]() ,
4)
,
4)
![]() .
5.39.
.
5.39.![]() .
5.40.
.
5.40.
![]() .
5.41. 1)
.
5.41. 1)
![]() ,
2)
,
2)
![]() ,
3)
,
3)
![]() .
5.42. 1)
.
5.42. 1)
![]() ;
2)
;
2)
![]() ;
3)
;
3)
![]() ;
4)
;
4)
![]() .
5.43.
.
5.43.![]() ,
,
![]() ,
,
![]() .
5.44. 1)
.
5.44. 1)
![]() ,
2)
,
2)
![]() . 5.45. 1)
. 5.45. 1)
![]() ,
2)
,
2)
![]() .5.46.
2,8; 0; 1,4. 5.47. 3. 5.48.
.5.46.
2,8; 0; 1,4. 5.47. 3. 5.48.
![]() .
5.49.
.
5.49.![]() ,
,
![]() ,
,
![]() .
5.50. (3;-1), (3;3),
.
5.50. (3;-1), (3;3),
![]() ;
;![]() ,
,
![]() ,
,
![]() .
5.51.
.
5.51.
![]() .
.
Глава 6. Кривые второго порядка
6.1. Преобразования системы координат
В системе координат положение каждой точки полностью определяется заданием ее координат. Если выбрать другую систему координат, то координаты точек в ней изменятся. При смене системы координат меняются и уравнения линий. В связи с этим встает задача: выбрать систему координат так, чтобы рассматриваемая линия имела в ней самое простое уравнение. Для этого необходимо знать формулы преобразования координат при переходе от одной системы к другой.
Пусть
![]() – исходная
система координат,
– исходная
система координат,
![]() – нoвая
система
координат (рис.6.1).
– нoвая
система
координат (рис.6.1).
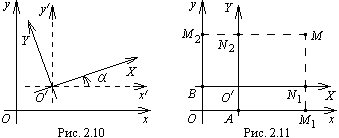
Проведем
через точку
![]() прямые,
параллельные
осям Ох
и
Оу,
получим систему координат
прямые,
параллельные
осям Ох
и
Оу,
получим систему координат
![]() .
Система
.
Система
![]() получается из х′О′у′
при повороте осей
получается из х′О′у′
при повороте осей
![]() и
и
![]() на угол
на угол
![]() .
Таким образом, переход от данной системы
координат
.
Таким образом, переход от данной системы
координат
![]() к новой системе
к новой системе
![]() совершается с помощью двух движений:
параллельного переноса и поворота.
совершается с помощью двух движений:
параллельного переноса и поворота.
-
Пусть
 – данная система координат;
– данная система координат;
 – система, которая получается из
– система, которая получается из
 при параллельном переносе (рис.6.2).
Положение новой системы определяется
координатами точки
при параллельном переносе (рис.6.2).
Положение новой системы определяется
координатами точки
 – центра
новой системы. Точка
– центра
новой системы. Точка
 в системе
в системе
 имеет координаты
имеет координаты
 .
Следовательно,
.
Следовательно,
 ,
,
 .
.
Рассмотрим
произвольную точку М.
В системе
![]() точка М
имеет координаты
точка М
имеет координаты
![]() .
Следовательно,
.
Следовательно,
![]() = х,
= х,
![]() = y.
В новой системе
= y.
В новой системе
![]() точка М
имеет координаты
точка М
имеет координаты
![]() ,
т.е.
,
т.е.
![]()
![]() .
Очевидно,
.
Очевидно,
![]() ,
,
![]() .
.
Учитывая, что
![]() ,
,
![]() ,
получаем
,
получаем
![]() ,
, ![]() ,
,
или
|
|
(6.1) |
которые называются формулами параллельного переноса системы координат.
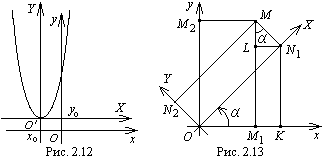
Пример
6.1. Рассмотрим
уравнение параболы
![]() .
Выражение
.
Выражение
![]() дополним до полного квадрата:
дополним до полного квадрата:
![]() ,
,
откуда
![]() ,
,
или
![]() .
.
Введем новые
координаты
![]() ,
,
![]() .
В системе координат
.
В системе координат
![]() данное уравнение имеет простой вид
данное уравнение имеет простой вид
![]() .
.
![]() ,
,
![]() (рис.6.3).
(рис.6.3).
-
Дана система координат
 и новая система
и новая система
 ,
полученная из
,
полученная из
 поворотом на угол
поворотом на угол
 (рис.
6.4). Пусть
М
– произвольная точка плоскости с
координатами
(рис.
6.4). Пусть
М
– произвольная точка плоскости с
координатами
 в системе
в системе
 ,
т.е.
,
т.е.
 .
Пусть
.
Пусть
 – координаты точки М
в новой системе координат, следовательно,
– координаты точки М
в новой системе координат, следовательно,
 ,
,
 .
Из точки
.
Из точки
 опустим перпендикуляр
опустим перпендикуляр
 на ось
на ось
 ,
тогда
,
тогда
![]() .
.
Из
треугольника
![]() получаем
получаем
![]() .
.
Проведем отрезок
![]() параллельно оси
параллельно оси
![]() .
Из треугольника
.
Из треугольника
![]() получаем
получаем
![]() ,
т.к.
,
т.к.
![]()
![]() .
Поскольку
.
Поскольку
![]() ,
,
![]() .
Подставляя найденные выражения в
равенство (5.13), получаем формулу для
координаты х.
Аналогично
выводится формула для координаты y.
.
Подставляя найденные выражения в
равенство (5.13), получаем формулу для
координаты х.
Аналогично
выводится формула для координаты y.
|
|
(6.2) |
Равенства (6.2)
являются формулами
для поворота системы координат на угол
![]() .
.
Пример
6.2. В системе
хОу
кривая задана уравнением
![]() .
Повернем систему координат на
.
Повернем систему координат на
![]() .
Для этого воспользуемся формулами (6.2)
.
Для этого воспользуемся формулами (6.2)
![]() ,
,
![]() ,
,
или
Следовательно,
Данное уравнение
в новой системе координат имеет вид
–2XY
= 1, или
![]() .
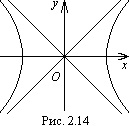
Это уравнение гиперболы, изображенной
на рис.6.5.
.
Это уравнение гиперболы, изображенной
на рис.6.5.