

Министерство образования и науки Российской Федерации
Федеральное агентство по образованию
Саратовский государственный технический университет
Балаковский институт техники, технологии и управления
настройка регуляторов
по графикам переходных процессов
Методические указания
к выполнению лабораторной работы по курсу
«Теория автоматического управления»
для студентов специальности 120100 «Технология машиностроения» для направления 657800 «Конструкторско-технологическое
обеспечение машиностроительного производства»
всех форм обучения
Одобрено
редакционно-издательским советом
Балаковского института техники,
технологии и управления
Балаково 2010
Цель работы
Данная работа является третьей из цикла работ, посвященных анализу систем управления процессами технологии машиностроения. Целью работы является освоение методики настройки промышленных регуляторов по графикам переходных процессов.
Основные понятия
П ропорционально-интегрально-дифференциальный
регулятор(ПИД – регулятор) является
типовым промышленным корректирующим
устройством, которое используется в
промышленных системах автоматического
регулирования. В таком случае его удобно
рассматривать как управляющее устройство,
служащее для расчета управляющего
воздействия, которое затем усиливается
по мощности и подается на исполнительный
механизм объекта управления.
ропорционально-интегрально-дифференциальный
регулятор(ПИД – регулятор) является
типовым промышленным корректирующим
устройством, которое используется в
промышленных системах автоматического
регулирования. В таком случае его удобно
рассматривать как управляющее устройство,
служащее для расчета управляющего
воздействия, которое затем усиливается
по мощности и подается на исполнительный
механизм объекта управления.
ПИД – регуляторудобно рассматривать в виде трех параллельно включенных компонент: пропорциональной, интегральной и дифференциальной (рис 1). Передаточная функция регулятора имеет вид
![]() .
.
Для некоторых объектов достаточно использовать пропорциональную составляющую, пропорционально-интегральную составляющую. Поэтому, кроме ПИД промышленностью выпускаются пропорциональные регуляторы (П-регуляторы) и пропорционально – интегральные регуляторы (ПИ-регуляторы).
П-регулятор.
Управляющее воздействие П-регулятора
пропорционально отклонению регулируемой
величины от заданного значения![]()
![]() .
.
П-регулятор имеет два настраиваемых параметра:
![]() - коэффициент
пропорциональной составляющей;
- коэффициент
пропорциональной составляющей;
![]() –контрольная точка
- значение управляющего воздействия
при равенстве регулируемой переменной
заданному значению (при нулевой ошибке
системы).
–контрольная точка
- значение управляющего воздействия
при равенстве регулируемой переменной
заданному значению (при нулевой ошибке
системы).
П-регуляторы позволяют управлять работой практически всех промышленных объектов, однако при статическом объекте управления общая разомкнутая система является статической и такие системы имеют остаточную ошибку.
Р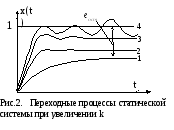 ассмотрим
переходные процессы статической системы
с П-регулятором при единичном задающем
воздействии. При малом значении
коэффициента регулятора переходный
процесс 1 (линия 1 на рис. 2) является
экспоненциальным и имеет большую
остаточную ошибку регулирования
ассмотрим
переходные процессы статической системы
с П-регулятором при единичном задающем
воздействии. При малом значении
коэффициента регулятора переходный
процесс 1 (линия 1 на рис. 2) является
экспоненциальным и имеет большую
остаточную ошибку регулирования![]()
![]() ,
,
где
![]() -
установившаяся ошибка объекта управления
без регулятора при
-
установившаяся ошибка объекта управления
без регулятора при
постоянном задающем или возмущающем воздействии.
![]() -
установившаяся ошибка системы с
регулятором при постоянном
-
установившаяся ошибка системы с
регулятором при постоянном
задающем или возмущающем воздействии;
k-коэффициент передачи разомкнутой системы в установившемся
состоянии.
При увеличении
коэффициента усиления остаточная ошибка
уменьшается, но в переходном процессе
появляется колебательная составляющая
(кривая 2 на рис. 2). При дальнейшем
увеличении коэффициента усиления ошибка
уменьшается и увеличивается степень
колебательности (кривая 3 на рис. 2). При
коэффициенте усиления, превышающем
какое- то предельно допустимое значение
![]() система становится неустойчивой,
переходный процесс колебательный
расходящийся, система не приходит в
заданное значение (кривая 4).
система становится неустойчивой,
переходный процесс колебательный
расходящийся, система не приходит в
заданное значение (кривая 4).
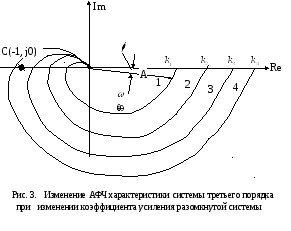
Для изучения
влияния коэффициента пропорциональной
составляющей регулятора рассмотрим
амплитудную фазовую частотную
характеристику (АФЧХ) статической
разомкнутой системы управления. АФЧХ
представляет собой линию, которую
описывает годограф (конец вектора модуля
частотной характеристики А) разомкнутой
системы при изменении частоты
отрабатываемого сигнала. Пусть АФЧХ
разомкнутой системы третьего порядка
при коэффициете ПИ-регулятора
![]() имеет вид кривой 1, показанной на рис.
3. При изменении частоты от
имеет вид кривой 1, показанной на рис.
3. При изменении частоты от![]() до
до![]() модуль АФЧХ уменьшается от коэффициента
разомкнутой системы
модуль АФЧХ уменьшается от коэффициента
разомкнутой системы![]() до 0.
до 0.
Фазовый сдвиг системы изменяется от 0 до -270 градусов (три звена первого порядка по 900). Система с отрицательной обратной связью является устойчивой:
- если общий сдвиг по фазе всех элементов разомкнутой системы не превышает -1800, тогда отрицательная обратная связь не превращается в положительную;
- общий сдвиг элементов системы по фазе может быть более -1800 , но тогда модуль частотной характеристики должен быть не более 1.
Эти два условия
выражаются критерием Найквиста, согласно
которому АФЧХ разомкнутой системы при
изменении частоты
![]() до
до![]() не должна охватывать точку С(-1,j0).
Это означает, что при отставании по фазе
более -1800 коэффициент системы
не должен быть более 1.
не должна охватывать точку С(-1,j0).
Это означает, что при отставании по фазе
более -1800 коэффициент системы
не должен быть более 1.
Система управления
с АФЧХ 1 является устойчивой, но имеет
большую остаточную ошибку, равную
![]() .
.
Повышение коэффициента системы путем увеличения коэффициента регулятора до k2 уменьшает ошибку, но приближает годограф к точке С(-1,j0). При этом в системе появляется колебательность. Дальнейшее увеличение коэффициента до значенияk3 еще более снижает ошибку, но повышает колебательность системы. И при коэффициентеk4 годограф начинает охватывать точку С(-1,j0) и отрицательная обратная связь превращается в положительную с коэффициентом по замкнутому контуру системы более 1, что приводит к расходящимся колебаниям.
Таким образом, увеличение коэффициента пропорциональной части регулятора ограничено возможностью получения неустойчивости и недопустимой колебательности регулируемого процесса. Ограничение коэффициента передачи регулятора приводит к большим остаточным ошибкам регулирования. Поэтому П-регулятор имеет ограниченное применение.