

методические указания по лабораторной работе / Исследование системы со скользящими режимами
.doc
|
|
Центральный институт непрерывного образования (Общество «Знание» России)
БАЛАКОВСКИЙ ИНСТИТУТ БИЗНЕСА И УПРАВЛЕНИЯ |

Исследование системы со скользящими режимами
Методические указания для студентов
специальностей:
210100 (код 65) - Управление и информатика в технических системах;
080507 (код 65) – Менеджмент организации;
080801 (код 65) – Прикладная информатика (в автомобилях и
автомобильном хозяйстве).
|
|
Одобрено Редакционно-издательским советом Балаковского Института Бизнеса и Управления |
Балаково 2007
Цель работы: Исследовать свойства замкнутой системы с релейным законом управления. Оценить влияние возмущения М(t) и помехи измерения h(t) на характер переходных процессов. Сравнить результаты с аналогичными, полученными для систем со старшей производной в управлении.
Основные сведения
Если в системе есть звенья с малой постоянной времени или большим коэффициентом усиления, то в них с большой вероятностью могут возникать разнотемповые процессы.
Для того, чтобы оценить возможность разделения движений в линейной системе, исследуют ее корневой портрет. Если на нем можно выделить две группы разнесенных между собой корней, то в системе будут протекать разнотемповые процессы; и чем больше разнесены эти корни, тем точнее будет разделение движений. На практике достаточно их разделение на порядок.
Автоколебания - колебания с постоянной амплитудой и частотой, возникающие в системе при отсутствии периодического сигнала на входе.
В работе исследуется объект управления, который описывается уравнением:
![]() , (1)
, (1)
где M(t) – возмущение.
Под возмущением понимается как влияние окружающей среды, так и изменение параметров самого объекта (параметрическое возмущение). Чаще используется следующее описание:
B – матрица нелинейных коэффициентов. Иногда такой объект называется нелинейным нестационарным с аддитивным управлением.
Если параметры объекта со временем не меняются и возмущение ничтожно мало, то объект – нелинейный стационарный:
На
основании требований к качеству
переходных процессов в замкнутой системе
(tп
и
![]() %)
формируется желаемое дифференциальное
уравнение на единицу меньшего порядка,
чем уравнение объекта,
%)
формируется желаемое дифференциальное
уравнение на единицу меньшего порядка,
чем уравнение объекта,
![]() , (2)
, (2)
так, чтобы в статике выполнялось условие y=V, где V – входное воздействие на систему. Управляющее воздействие имеет вид:
![]() ,
,
![]() ,
(3)
,
(3)
где
![]() – размах реле, соответствующий
ограниченному ресурсу управления
объекта;
– размах реле, соответствующий
ограниченному ресурсу управления
объекта;
![]() – уравнение
поверхности скольжения.
– уравнение
поверхности скольжения.
При идеальном скользящем режиме частота переключения стремится к бесконечности. В реальной ситуации частота переключения определяется зоной нечувствительности и малой инерционностью.
Для
организации закона управления (3) с целью
оценки производной
![]() следует использовать дифференцирующий
фильтр (рисунок 2), который описывается
уравнением:
следует использовать дифференцирующий
фильтр (рисунок 2), который описывается
уравнением:
![]() . (4)
. (4)
Его постоянная времени выбирается также, как и в случае систем со старшей производной в управлении, по соотношению:
![]() .
.
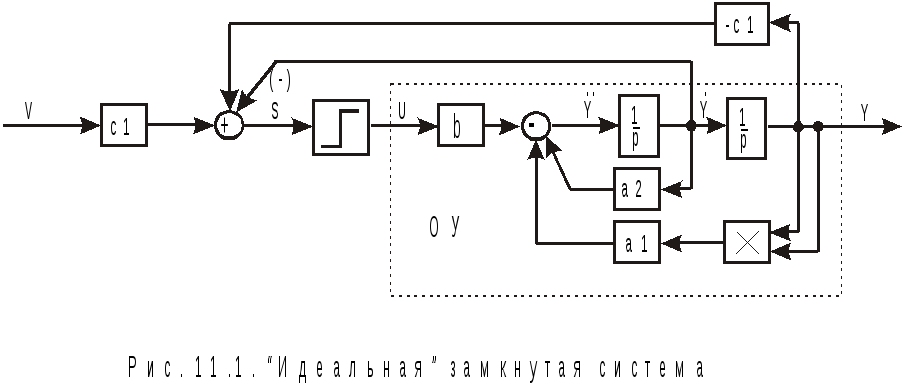
Рисунок
1. «Идеальная» замкнутая система.
Помеха измерения проявляется в системах со скользящими режимами аналогично системам со старшей производной в управлении, поэтому при наличии в системе помехи измерения h(t) следует повышать хотя бы на единицу порядок дифференцирующего фильтра.
На рисунке 3 представлена схема системы с дифференцирующим фильтром второго порядка.
Исследование свойств системы осуществляется с помощью метода разделения движений, причем быстрой составляющей соответствует контур, приведенный на рисунке 4.
Поскольку контур быстрых движений (КБД) является нелинейным, для исследования его свойств следует применять метод гармонического баланса. Метод гармонического баланса позволяет выделить такой специфический вид переходных процессов, как автоколебания.
Метод гармонического баланса предполагает предварительную линеаризацию нелинейного элемента (гармоническую линеаризацию).
Передаточная функция гармонически линеаризованного нелинейного элемента следующая:
![]() , (5)
, (5)
где с – размах реле;
А – амплитуда автоколебаний.
Методические указания
-
Приступая к работе, необходимо предварительно сформировать желаемое дифференциальное уравнение и определить параметры дифференциальных фильтров 1-го и 2-го порядка. Параметры объекта и требования к качеству работы системы приведены в таблице 1.
2. При исследовании свойств системы с помощью программы “COMPAS” следует в качестве метода интегрирования использовать метод Рунге-Кутта 4-го порядка точности и уменьшать шаг интегрирования до 0,001.
3. При исследовании переменной U(t) необходимо вводить масштаб не более 0,2.
Таблица 1
|
|
Варианты |
||||||
|
Параметр |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
|
а1 |
2 |
3 |
1 |
3 |
2 |
1 |
2 |
|
а2 |
1 |
2 |
1 |
4 |
3 |
2 |
5 |
|
b |
0.6 |
1 |
2 |
1 |
0.5 |
2 |
0.7 |
|
tп |
3 |
1 |
4 |
2 |
3 |
1 |
1 |
|
U |
10 |
10 |
10 |
10 |
10 |
10 |
10 |
Порядок выполнения работы
-
Набрать модель “идеальной” замкнутой системы (рисунок 1). Построить фазовый портрет системы. Оценить качество переходного процесса по переменным y(t),
 и U(t)
при V=0,
M(t)=0
и при различных начальных условиях
y(0)
и
и U(t)
при V=0,
M(t)=0
и при различных начальных условиях
y(0)
и
 из диапазона [-2, 2].
из диапазона [-2, 2]. -
Для оценки производной ввести в систему фильтр 1-го порядка, повторить п. 1 (рисунок 2).
-
Зарисовать переходный процесс для переменной
 ,
изменяя значение
от 0,1Тж
до 0,01Тж.
,
изменяя значение
от 0,1Тж
до 0,01Тж. -
Подавая на объект возмущение
 (ступенчатое воздействие) зарисовать
переходный процесс
(ступенчатое воздействие) зарисовать
переходный процесс
 ,
изменяя поочередно
,
изменяя поочередно
 и диапазоне:
и диапазоне:

-
Оценить влияние помехи на
 ,
подавая на вход фильтра
,
подавая на вход фильтра
 ,
где в качестве помехи использовать
гармонический сигнал с амплитудой
А=0,1
и несколькими значениями периода из
диапазона Т=(0,5-0,05).
,
где в качестве помехи использовать
гармонический сигнал с амплитудой
А=0,1
и несколькими значениями периода из
диапазона Т=(0,5-0,05). -
Заменить фильтр 1-го порядка фильтром 2-го порядка (рисунок 3) и повторить п. 5.
-
Для системы с фильтром 2-го порядка построить фазовый портрет и зарисовать переходный процесс для переменных y(t) и
 .
. -
Меняя поочерёдно d и в диапазонах d=(0,2-1) иот 0,1Тж до 0,01Тж, оценить их влияние на
 .
.
Содержание отчета
-
Цель работы.
-
Результаты расчёта параметров дифференцирующих фильтров 1-го и 2-го порядков.
-
Структурные схемы системы.
-
Графики всех переходных процессов и фазовые портреты.
-
Выводы по работе.
Контрольные вопросы
-
При каких условиях в системе возникает скользящий режим?
-
Что представляет собой эквивалентное управление?
-
Как сформировать поверхность переключения?
-
Как уменьшить влияние помех измерения на поведение системы?
-
Как оценить устойчивость быстрых движений в системе?
-
Влияет ли величина ресурса управления объекта на автоколебания в контуре быстрых движений?
СПИСОК ЛИТЕРАТУРЫ
-
Топчеев Ю.И. Атлас для проектирования систем автоматизированного регулирования. М: Машиностроение. 1989.
-
Иващенко Н.Н. Автоматическое регулирование. М.: Машгиз. 1962.
-
Справочное пособие по теории автоматического управления. Под ред. Е.А.Санковского. МН.: Высшая шк. 1973.-584 с.
-
Гузенко А.И. Основы теории автоматического регулирования. Под ред. В.В. Солодовникова. М.:высшая шк. 1977. – 408 с.
-
Куропаткин П.В. Теория автоматического управления. М.: Высш. Шк. 1973. – 528 с.
-
Анхимюк В.Л. Теория автоматического управления. 3-е изд. Минск: Высшая шк. 1979. – 350 с.
-
Иващенко Н.Н. Автоматическое регулирование. М.: Машиностроение. 1972. – 736 с.
Рисунок
2 – Замкнутая система с дифференцирующим
фильтром 1-го порядка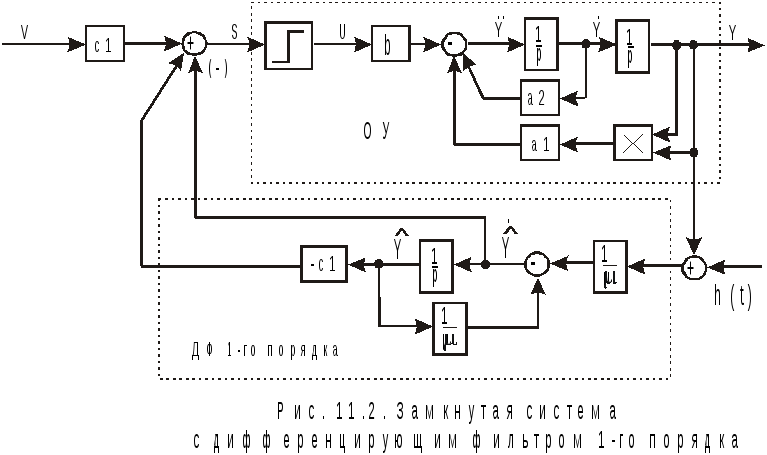
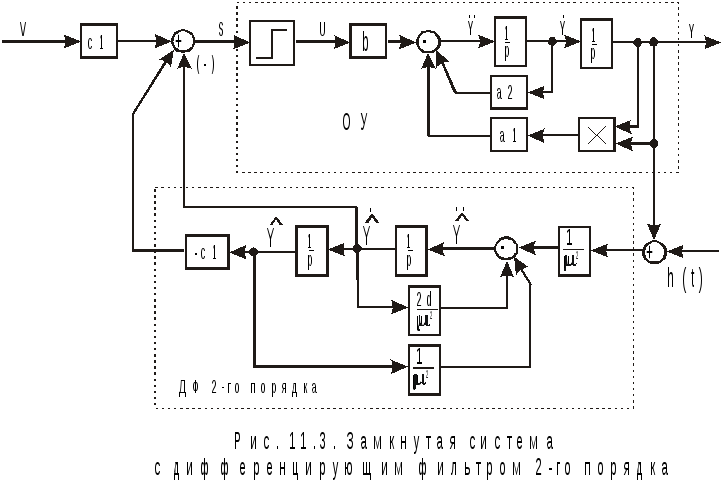
Рисунок
3. Замкнутая система с дифференцирующим
фильтром 2-го порядка.
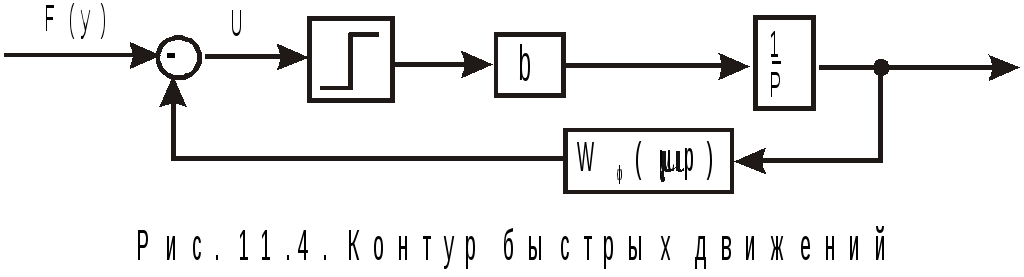
Рисунок
4. Контур быстрых движений.
Исследование системы со скользящими режимами
Балаковский Институт Бизнеса и Управления
Методические указания для студентов
специальностей:
210100 (код 65) - Управление и информатика в технических системах;
080507 (код 65) – Менеджмент организации;
080801 (код 65) – Прикладная информатика (в автомобилях и
автомобильном хозяйстве).
Составитель:
СКОРОБОГАТОВА Татьяна Николаевна
Рецензент: Власов Вячеслав Викторович
Редактор: Пономарева Марина Вячеславовна
Лицензия Код 221 Серия ИД № 03989 от 12.02.01 г.
Подписано в печать 09.04.07 г. Формат 60х84 1/16
Бум. Тип. Уч.-изд. л 0,75
Тираж 100 экз. Заказ 02-04/07
_______________________________________________
Подготовка оригинал-макета–
Балаковский Институт Бизнеса и Управления
Печать тиража – Ризограф «Print-Fix»
Балаковский Институт Бизнеса и Управления
413800, г. Балаково Саратовской области,
ул. Транспортная, 4