

-
Последовательность выполнения работы.
-
Получить у преподавателя функциональную схему системы управления.
-
На основании общих знаний физики процесса описать общие закономерности функционирования объекта управления.
-
Выявить управляемый выходной параметр объекта управления и управляющее воздействие. Вывить качественную зависимость выходного управляющего параметра от управляющего воздействия. Предположительно задаться видом количественной зависимости.
-
Выявить возмущающие воздействия, действующие на объект управления и вызывающие отклонение выходного параметра объекта от заданного значения.
-
Выявить датчик, обеспечивающий измерение управляемого параметра.
-
Выявить задающее воздействие, обеспечивающее возможность формирования заданного значения регулируемого параметра.
-
Выявить элемент, рассчитывающий ошибку системы управления.
-
Выявить управляющее устройство, обеспечивающее определение значения управляющего воздействия.
-
Выявить исполнительный механизм, обеспечивающий подачу управляющего воздействия на объект управления.
-
Выявить все промежуточные элементы, согласующие элементы системы по типу сигналов, мощности, обеспечивающие требуемую мощность исполнительного механизма.
-
Подготовить отчет с результатами анализа системы управления.
-
На компьютере нарисовать функциональную схему системы управления.
-
Описать назначение системы управления.
-
Перечислить и показать все элементы системы управления.
-
Обозначить и показать все сигналы, действующие в системе – задающее значение, возмущающие воздействия, выходную переменную, ошибку системы, управляющее воздействие, промежуточные сигналы системы.
-
Описать работу системы в стационарном режиме работы.
-
Описать работу системы при изменении задающего воздействия.
-
Описать работу системы при изменении возмущающего воздействия.
-
Сделать анализ, какие возмущающие воздействия отрабатывает данная система управления.
-
-
-
Отчет по работе перед преподавателем.
-
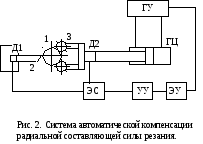
Пример анализа системы управления. В качестве примера проведем анализ системы автоматической компенсации радиальной составляющей силы резания при токарной обработке [1].
-
Функциональная схема системы управления приведена на рис. 2.
-
Общие закономерности функционирования объекта управления. Объектом анализа является механическая система токарной обработки детали. При обработке детали 1 резцом 2, под действием радиальной силы резания появляется изгиб детали, что приводит к снижению точности ее обработки.
-
 Для
устранения деформации изгиба обрабатываемой
детали имеется опорное устройство в
виде подвижного люнета. Опорные ролики
люнета 3, принимая на себя радиальную
составляющую силы резания, не дают
возможности детали прогибаться. На
деталь со стороны резца действует
радиальная сила резания, со стороны
опорных роликов люнета сила, определяемая
цилиндром 4.
Для
устранения деформации изгиба обрабатываемой
детали имеется опорное устройство в
виде подвижного люнета. Опорные ролики
люнета 3, принимая на себя радиальную
составляющую силы резания, не дают
возможности детали прогибаться. На
деталь со стороны резца действует
радиальная сила резания, со стороны
опорных роликов люнета сила, определяемая
цилиндром 4.
Обратим внимание, что, вследствие изменения диаметра детали в процессе резания, люнет не может быть жестко зафиксирован. При уменьшении диаметра детали резец и ролики сближаются, при увеличении - раздвигаются. Поэтому объектом управления является подвижная система: деталь, ролики люнета на штоке цилиндра. На деталь действует переменная радиальная сила резания, которая уравновешивается силой упругости детали при ее изгибе и силой на штоке цилиндра люнета. Деталь не будет прогибаться только тогда, когда сила на штоке цилиндра будет равна радиальной силе резания. В это время усилие изгиба детали нулевое и деформация прогиба детали отсутствует.
Таким образом, надо создать систему, обеспечивающую равенство усилия на штоке цилиндра радиальной силе резания. При таком подходе объектом управления является система, обеспечивающая усилие на штоке гидроцилиндра. В данном случае в объект управления удобно внести и исполнительный механизм – гидроусилитель, преобразующий входное напряжение электронного усилителя в пропорциональное давление на цилиндре гидроцилиндра.
-
Вход-выход объекта управления. Управляемый параметр объекта управления. Управляющее воздействие. Управляемым параметром является значение усилия на штоке цилиндра, прикладываемого через ролики люнета на обрабатываемую деталь. Управляющим воздействием является напряжение, поступающее на гидроусилитель.
-
Возмущающие воздействия. В данной системе имеется два вида возмущающих воздействий. Возмущающими воздействиями, приводящими к изменениям радиальной силы резания являются нестабильность диаметра заготовки детали, характеристик материала, изменение положение резца относительно обрабатываемой детали. Данные возмущения приводят к изменению задания рассматриваемой системе управления. Возмущающие воздействия в виде изменения характеристик элементов системы, давления и характеристик масла в гидросистеме, приводящие к изменению зависимостей сигналов на выходе элементов от входных сигналов, изменению пропорциональной зависимости между напряжением на входе гидроусилителя и усилием на штоке гидроцилиндра приводят к деформации и увеличению погрешности обработки детали. Данные возмущения отрабатываются по отклонению текущего значения усилия на штоке от заданного значения.
-
Датчик управляемой переменной. Управляемый параметр измеряется датчиком усилия на штоке цилиндра Д2.
-
Задающее воздействие. Роль задающего воздействием выполняет радиальная составляющая силы резания, измеряемая датчиком Д1. Еще раз отметим, что данная система служит не для управления радиальной силой резания. Она обеспечивает отслеживание силой опоры люнета переменного значения радиальной составляющей силы резания для устранения (уменьшения) деформации детали в процессе обработки, тем самым, уменьшения погрешность обработки.
-
Элемент сравнения. Ошибка системы управления определяется элементом сравнения ЭС путем вычитания текущего значения управляемого параметра из заданного значения
![]() ,
,
где
![]() - соответственно выходные сигналы
датчиков Д1 и Д2.
- соответственно выходные сигналы
датчиков Д1 и Д2.