

методические указания по лабораторной работе / Анализ нелинейной САУ
.doc
|
|
Центральный институт непрерывного образования (Общество «Знание» России)
БАЛАКОВСКИЙ ИНСТИТУТ БИЗНЕСА И УПРАВЛЕНИЯ |

Анализ НЕЛИНЕЙНОЙ сАУ со старшей производной в ЗАКОНЕ управлениЯ
Методические указания для студентов
специальностей:
210100 (код 65) - Управление и информатика в технических системах;
080507 (код 65) – Менеджмент организации;
080801 (код 65) – Прикладная информатика (в автомобилях и автомобильном хозяйстве).
|
|
Одобрено Редакционно-издательским советом Балаковского Института Бизнеса и Управления |
Балаково 2007
Цель работы: Исследовать свойства замкнутой системы с различными дифференцирующими фильтрами, оценить влияние возмущения и помехи измерения на характер переходных процессов.
Основные сведения
Свойство системы можно интерпретировать графически в пространстве состояний, т.е. в пространстве размерности n, координатами которого являются переменные состояния исследуемого объекта или системы.
![]()
![]()

![]()
![]()
Рисунок 1 – Пространство состояний
Состояние объекта или системы в произвольный момент времени изображается точкой пространства состояний, которая называется изображающей точкой объекта.
В работе исследуется объект управления, описываемый уравнением:
![]() (1)
(1)
где
![]() - возмущение;
- возмущение;
![]() ;
;
![]() .
.
На основании
требований к качеству переходных
процессов в замкнутой системе (![]() и
и
![]() )
формируется желаемое дифференциальное
уравнение того же порядка, что и уравнение
объекта.
)
формируется желаемое дифференциальное
уравнение того же порядка, что и уравнение
объекта.
![]() (2)
(2)
так, чтобы в статике
выполнялось условие
![]() ,
где
,
где
![]() -
входное воздействие на систему. Согласно
методу синтеза управляющее воздействие
имеет вид:
-
входное воздействие на систему. Согласно
методу синтеза управляющее воздействие
имеет вид:
![]() , (3)
, (3)
где
![]() -
коэффициент усиления регулятора,
численное значение которого приближенно
можно определить по соотношению
-
коэффициент усиления регулятора,
численное значение которого приближенно
можно определить по соотношению
![]() .
.
На практике для
организации управления (3) с целью оценки
производных
![]() и
и
![]() используют дифференцирующий фильтр,
который в простейшем случае описывается
уравнением:
используют дифференцирующий фильтр,
который в простейшем случае описывается
уравнением:
![]() , (4)
, (4)
где
![]() и
и
![]() являются оценками
являются оценками
![]() и
и
![]() ;
;
![]() -
коэффициент демпфирования, обеспечивающий
переходные процессы в фильтре близкие
к монотонным;
-
коэффициент демпфирования, обеспечивающий
переходные процессы в фильтре близкие
к монотонным;
![]() -
постоянная времени фильтра, которая
выбирается из условия
-
постоянная времени фильтра, которая
выбирается из условия
![]() ;
;
![]() -
желаемая постоянная времени.
-
желаемая постоянная времени.
Рассчитанный таким образом фильтр будем называть «быстрым». На рисунке 2 показана схема системы с дифференцирующим фильтром второго порядка.
Исследование свойств системы осуществляется с помощью метода разделения движений, причем быстрой составляющей соответствует контур, приведенный на рисунке 3.
Характеристическое уравнение контура быстрых движений (КБД) имеет вид:
![]()
и может быть представлено в стандартной форме
![]() , (5)
, (5)
где
![]() - постоянная времени контура; (6)
- постоянная времени контура; (6)
![]() - коэффициент
демпфирования.
- коэффициент
демпфирования.
Если рассчитывать
параметры контура быстрых движений из
условия разделения движений
![]() и монотонности переходного процесса в
нем
и монотонности переходного процесса в
нем
![]() ,
то найденные по соотношениям (6) параметры
дифференцирующего фильтра
,
то найденные по соотношениям (6) параметры
дифференцирующего фильтра
![]() и
и
![]() соответствуют фильтру, который будем
называть «медленным».
соответствуют фильтру, который будем
называть «медленным».
Наличие в системе
помехи измерения
![]() приводит
к необходимости повышать хотя бы на
единицу порядок дифференцирующего
фильтра, передаточная функция которого
имеет вид:
приводит
к необходимости повышать хотя бы на
единицу порядок дифференцирующего
фильтра, передаточная функция которого
имеет вид:
 ,
(7)
,
(7)
где параметры А
и В выбираются из условия устойчивости
контура быстрых движений, а постоянная
времени
![]() рассчитывается для «быстрого» или
«медленного» фильтра.
рассчитывается для «быстрого» или
«медленного» фильтра.
Методические указания
1. В работе в качестве объекта управления используется звено второго порядка, описываемое дифференциальным уравнением:
![]() ,
,
численные значения
коэффициентов которого
![]() приведены в таблице 1.
приведены в таблице 1.
2. Приступая к работе, необходимо (в соответствии с номером варианта) сформировать желаемое дифференциальное уравнение и определить параметры «быстрого» и «медленного» дифференцирующего фильтров 2-го порядка.
3. При исследовании свойств системы с помощью программных продуктов, следует в качестве метода интегрирования использовать метод Рунге-Кутта 4-го порядка точности и уменьшить в два раза шаг интегрирования.
4. При исследовании
быстрой переменной
![]() необходимо вводить масштаб не более
0,05.
необходимо вводить масштаб не более
0,05.
5. Пункты задания, отмеченные символом *, выполняются по указанию преподавателя.
6. При исследовании работы системы с «медленным» фильтром следует подключить вход усилителя (с коэффициентом с1) непосредственно к выходу объекта.
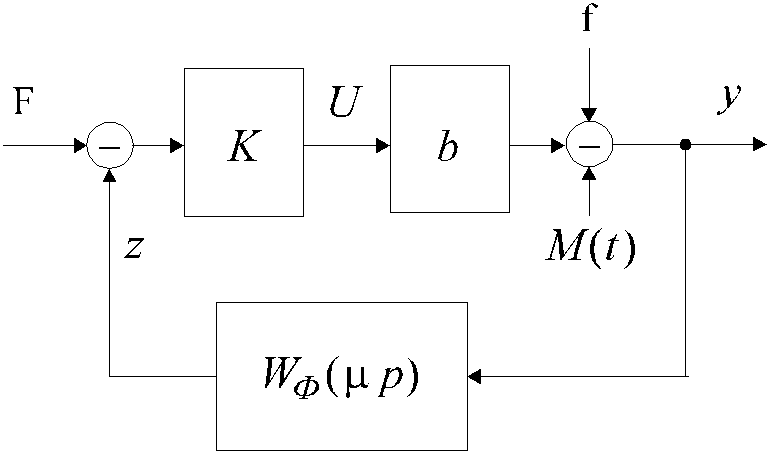
Рисунок 1 Схема контура быстрых движений

Рисунок 2 - Структурная схема замкнутой системы
Порядок выполнения работы
1. Определить параметры регулятора и фильтра на основании требований к качеству работы системы (таблица 1) для объекта вида (1).
Оценить качество
переходных процессов объекта по
переменной
![]() при
при
![]() ,
,
![]() при нулевых начальных условиях.
при нулевых начальных условиях.
Таблица 1.
|
Параметр |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
|
|
2 |
3 |
1 |
3 |
2 |
1 |
4 |
2 |
|
|
1 |
2 |
1 |
4 |
3 |
2 |
1 |
5 |
|
|
0.6 |
1 |
2 |
1 |
0.5 |
2 |
0.6 |
0.7 |
|
|
3 |
1 |
4 |
2 |
3 |
1 |
2 |
1 |
|
|
30 |
10 |
0 |
0 |
30 |
15 |
20 |
10 |
2. Набрать модель
замкнутой системы с «быстрым» фильтром
2-го порядка и зарисовать переходной
процесс для медленной
![]() и быстрой переменной
и быстрой переменной
![]() при
при
![]() ,
,
![]() при нулевых начальных условиях. Проверить,
соответствует ли качество переходного
процесса желаемому.
при нулевых начальных условиях. Проверить,
соответствует ли качество переходного
процесса желаемому.
3. Сравнить измеренные
значения
![]() и
и
![]() с действительными
с действительными
![]() и
и
![]() при нулевых начальных условиях.
при нулевых начальных условиях.
4. Исследовать
влияние
![]() на процессы
на процессы![]() и
и
![]() ,
изменяя
,
изменяя
![]() в диапазоне (1-100) при нулевых начальных
условиях.
в диапазоне (1-100) при нулевых начальных
условиях.
5. Подавая на объект
возмущение
![]() ,
зарисовать процессы
,
зарисовать процессы
![]() и
и
![]() для рассчитанного значения
для рассчитанного значения
![]() ;
здесь
;
здесь
![]() ,
,
![]() - момент возникновения возмущения.
- момент возникновения возмущения.
6. Оценить влияние
помехи
![]() на
на
![]() и
и
![]() .
При этом на вход фильтра следует подавать
.
При этом на вход фильтра следует подавать
![]() ,
где в качестве помехи использовать
гармонический сигнал с амплитудой
,
где в качестве помехи использовать
гармонический сигнал с амплитудой
![]() и несколькими значениями периода из
диапазона
и несколькими значениями периода из
диапазона
![]() .
.
7. Исследовать
влияние параметров фильтра на характер
процессов, задавая
![]() и
и
![]() ,
рассчитанные из условия «медленного»
дифференцирующего фильтра. Сравнить
результаты с процессами, полученными
в п. 2. Зарисовать переходной процесс
,
рассчитанные из условия «медленного»
дифференцирующего фильтра. Сравнить
результаты с процессами, полученными
в п. 2. Зарисовать переходной процесс
![]() .
Проверить, соответствует ли качество
переходного процесса желаемому.
.
Проверить, соответствует ли качество
переходного процесса желаемому.
8. Вместо
![]() включить в систему нелинейный элемент
типа «ограничение» и исследовать влияние
величины ресурса управления
включить в систему нелинейный элемент
типа «ограничение» и исследовать влияние
величины ресурса управления
![]() на
характер процессов в системе. Зарисовать
на
характер процессов в системе. Зарисовать
![]() и
и
![]() при
при
![]() и нескольких значениях
и нескольких значениях
![]() ,
выбранных из диапазона (5-20).
,
выбранных из диапазона (5-20).
Содержание отчета
1 Цель работы.
2 Результаты расчета параметров регулятора и дифференцирующих фильтров.
3 Структурные схемы систем с дифференцирующими фильтрами.
4 Графики всех переходных процессов.
5 Выводы по работе.
Контрольные вопросы
1 Как формируется закон управления в системах с вектором скорости?
2 Какова роль контура быстрых движений в системах с вектором скорости?
3 С какой целью в систему вводят дифференцирующий фильтр?
4 Как рассчитать параметры дифференцирующего фильтра в системах без помех и при наличии помех?
5 Как оценить влияние малой инерционности фильтра на свойства замкнутой системы?
СПИСОК ЛИТЕРАТУРЫ
-
Топчеев Ю.И. Атлас для проектирования систем автоматизированного регулирования. М: Машиностроение. 1989.
-
Иващенко Н.Н. Автоматическое регулирование. М.: Машгиз. 1962.
-
Справочное пособие по теории автоматического управления. Под ред. Е.А.Санковского. МН.: Высшая шк. 1973.-584 с.
-
Гузенко А.И. Основы теории автоматического регулирования. Под ред. В.В. Солодовникова. М.:высшая шк. 1977. – 408 с.
Анализ НЕЛИНЕЙНОЙ сАУ со старшей производной в ЗАКОНЕ управлениЯ
Балаковский Институт Бизнеса и Управления
Методические указания для студентов
специальностей:
210100 (код 65) - Управление и информатика в технических системах;
080507 (код 65) – Менеджмент организации;
080801 (код 65) – Прикладная информатика (в автомобилях и
автомобильном хозяйстве).
Составитель:
СКОРОБОГАТОВА Татьяна Николаевна
Рецензент: Власов Вячеслав Викторович
Редактор: Пономарева Марина Вячеславовна
Лицензия Код 221 Серия ИД № 03989 от 12.02.01 г.
Подписано в печать 09.04.07 г. Формат 60х84 1/16
Бум. Тип. Уч.-изд. л 0,75
Тираж 100 экз. Заказ 02-04/07
_______________________________________________
Подготовка оригинал-макета–
Балаковский Институт Бизнеса и Управления
Печать тиража – Ризограф «Print-Fix»
Балаковский Институт Бизнеса и Управления
413800, г. Балаково Саратовской области,
ул. Транспортная, 4