

РГР / kontrolnaya_rabota_lokalnye_sistemy_upravleniya_variant_50
.doc
-
Трапеция 4
τ
h(τ)
t = τ/ωk4
h(t) = P4(0)∙h(τ)
Р(0)=Р1(0)+Р2(0)+Р3(00+Р4(0)
0
0
0,000
0,000
0,000
0,5
0,297
1,832
0,024
0,660
1
0,575
3,663
0,046
1,272
1,5
0,813
5,495
0,065
1,789
2
0,986
7,326
0,078
2,166
2,5
1,105
9,158
0,088
2,417
3
1,172
10,989
0,093
2,539
3,5
1,175
12,821
0,093
2,539
4
1,141
14,652
0,091
2,441
4,5
1,085
16,484
0,086
2,311
5
1,019
18,315
0,081
2,167
5,5
0,962
20,147
0,076
2,047
6
0,922
21,978
0,073
1,975
6,5
0,903
23,810
0,072
1,953
7
0,909
25,641
0,072
1,981
7,5
0,934
27,473
0,074
2,043
8
0,97
29,304
0,077
2,132
8,5
1,006
31,136
0,080
2,210
9
1,039
32,967
0,083
2,268
9,5
1,059
34,799
0,084
2,295
10
1,063
36,630
0,085
2,289
10,5
1,055
38,462
0,084
2,256
11
1,034
40,293
0,082
2,204
11,5
1,01
42,125
0,080
2,147
12
0,984
43,956
0,078
2,099
12,5
0,965
45,788
0,077
2,068
13
0,955
47,619
0,076
2,063
13,5
0,954
49,451
0,076
2,078
14
0,965
51,282
0,077
2,111
14,5
0,981
53,114
0,078
2,150
15
1,001
54,945
0,080
2,193
15,5
1,019
56,777
0,081
2,224
16
1,031
58,608
0,082
2,236
16,5
1,036
60,440
0,082
2,230
17
1,032
62,271
0,082
2,209
17,5
1,023
64,103
0,081
2,173
18
1,008
65,934
0,080
2,147
18,5
0,933
67,766
0,074
2,054
19
0,981
69,597
0,078
2,093
19,5
0,973
71,429
0,077
2,102
20
0,972
73,260
0,077
2,114
20,5
0,974
75,092
0,077
2,133
21
0,981
76,923
0,078
2,150
21,5
0,997
78,755
0,079
2,183
22
1,012
80,586
0,080
2,204
22,5
1,022
82,418
0,081
2,212
23
1,025
84,249
0,081
2,205
23,5
1,023
86,081
0,081
2,188
24
1,015
87,912
0,081
2,165
24,5
1,005
89,744
0,080
2,144
25
0,991
91,575
0,079
2,124
25,5
0,986
93,407
0,078
2,121
26
0,984
95,238
0,078
2,125
Искомую переходную функцию находят путем алгебраического суммирования ординат переходных функций, соответствующих каждой трапеции (рис. 5.)
Рис. 5.
7. Смоделируем АСР с использованием программы 20-sim
Составим структурную схему нашей системы (рис. 6.) и занесем найденные нами параметры (рис. 7.).
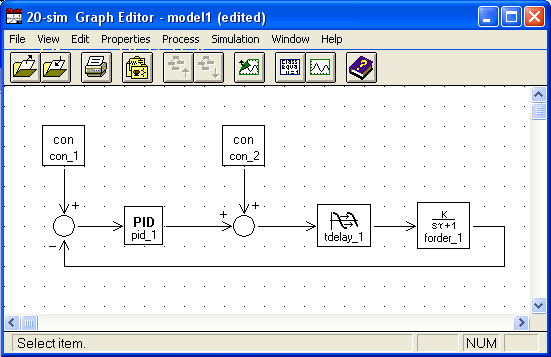
Рис. 6.
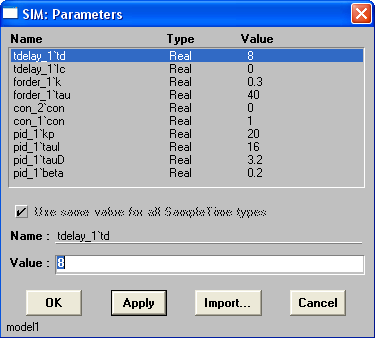
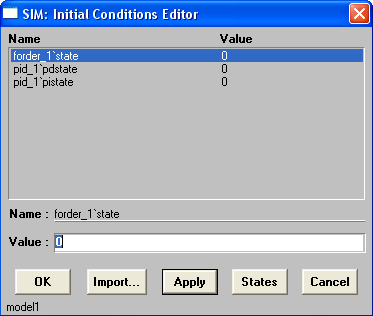
Рис. 7.
Получим переходный процесс (рис. 8.):
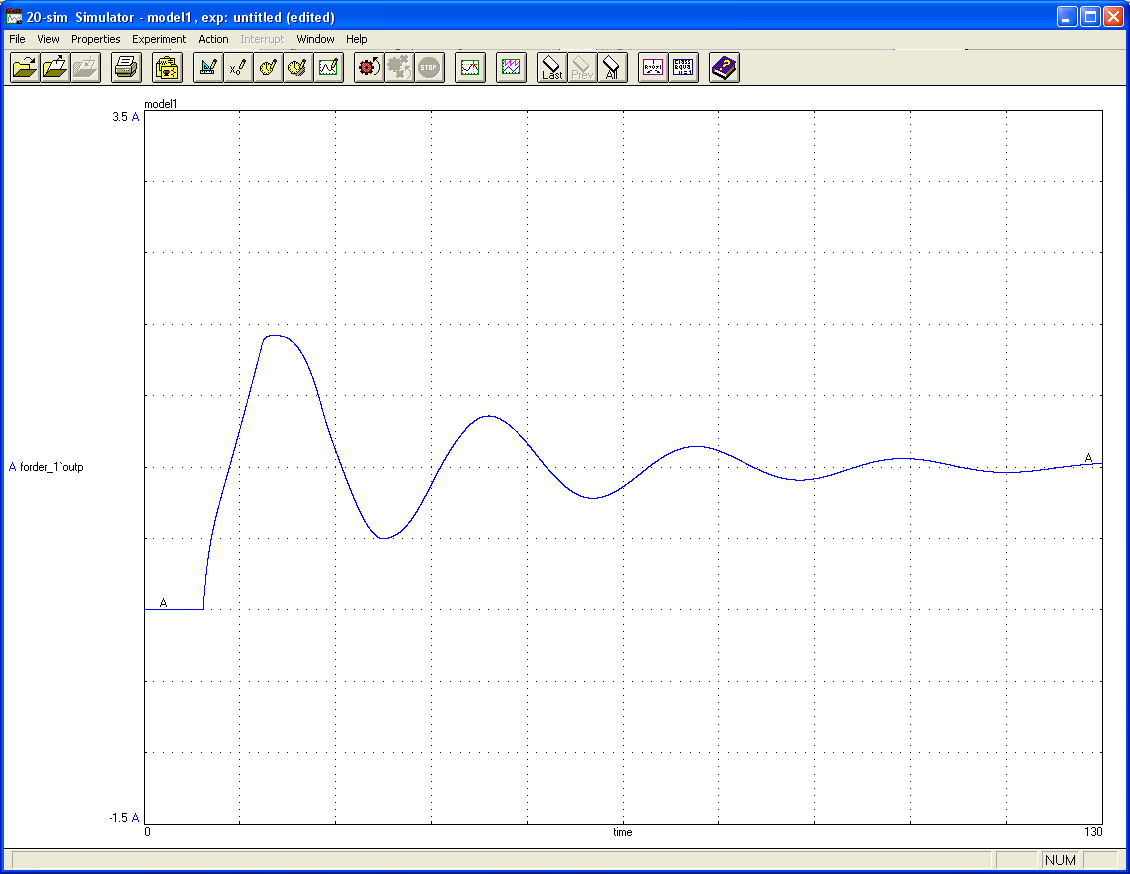
Рис. 8.
8. Оценим качество регулирования.
На практике используются такие оценки качества регулирования АСР:
ψ – степень затухания – это отношение разности двух соседних положительных амплитуд колебаний выходной величины к первой из них:
![]() .
.
хвых.макс. – максимальная величина динамического отклонения.
σ – перерегулирование – отношение разности между максимальным динамическим отклонением и установившимся значением регулируемой величины к установившемуся значению регулируемой величины:
![]() %.
%.
tp – время регулирования – промежуток времени, в течение которого отклонение регулируемой величины от заданного значения делается меньшей определенной наперед заданной величины ∆х.
Определим параметры для нашего переходного процесса h(t) (рис. 5) и для модели, построенной в 20-sim (рис. 8.).
|
Параметры |
h(t) |
20-sim |
|
хвых.макс |
2,539 |
1,92 |
|
хвых.1 |
0,395 |
0,91 |
|
хвых.3 |
0,145 |
0,355 |
|
∆х |
0,081 |
0,098 |
|
Хвых(∞) |
2,144 |
1,01 |
|
σ |
≈18,4% |
≈90% |
|
tp |
138,9 |
117,09 |
|
ψ |
0,633 |
0,61 |
Р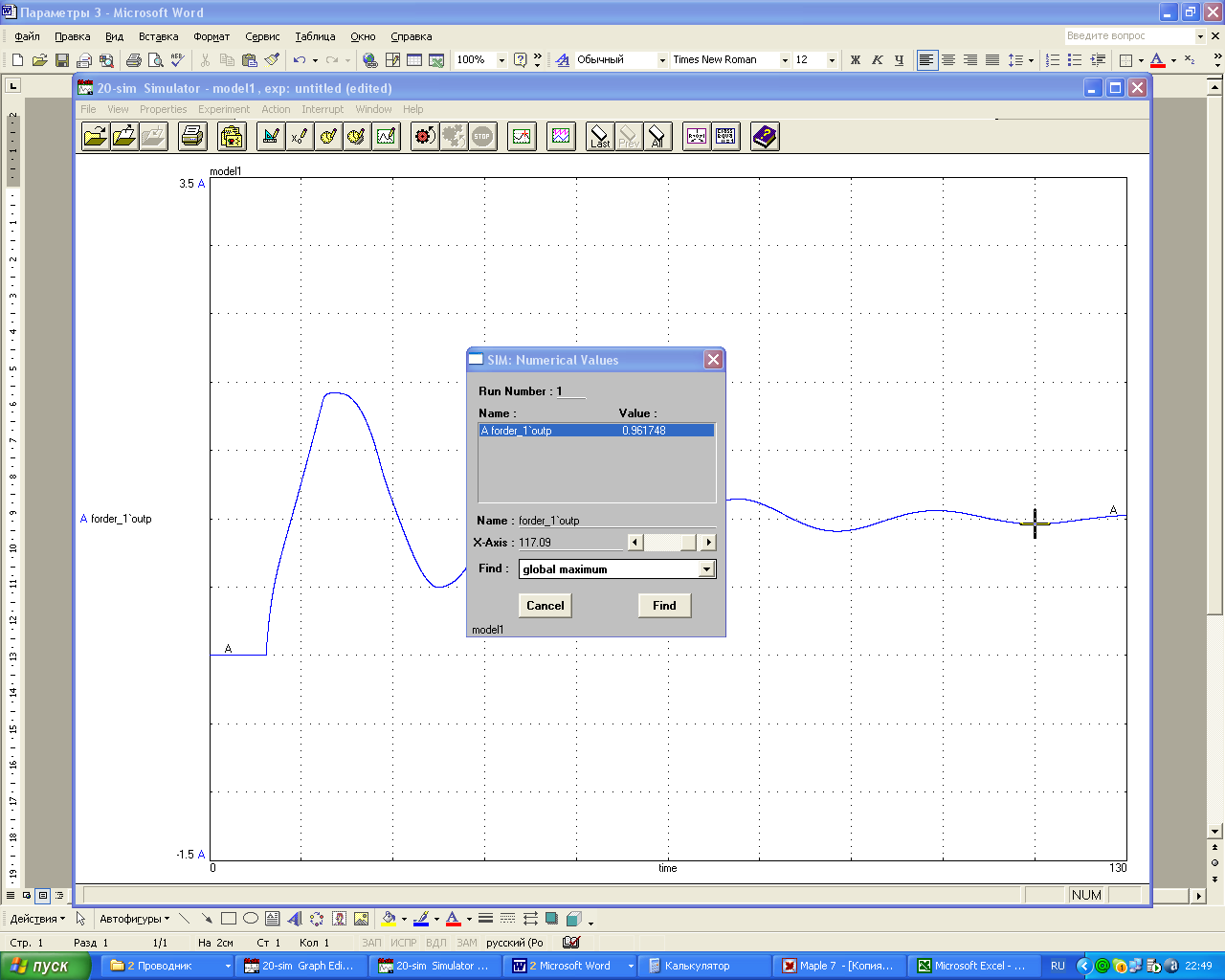 ис.
10. tp
– время регулирования.
ис.
10. tp
– время регулирования.
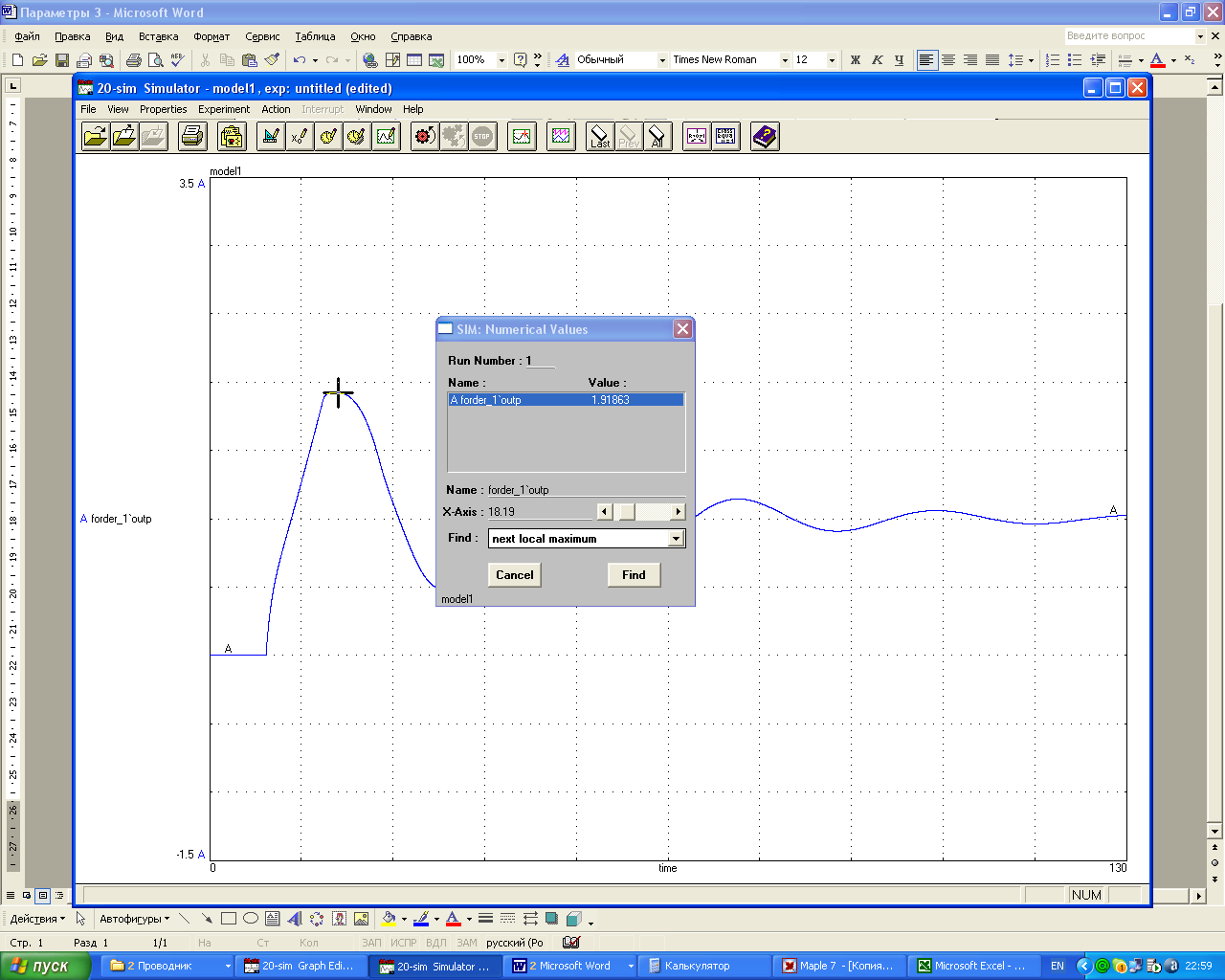
Рис. 9. хвых.макс. – максимальная величина динамического отклонения.