

РГР / Решение2
.docx-
Описание работы системы автоматического управления
-
Принципиальная схема
-
Цель системы заключается в автоматическом слежении за положением самолеты или какого-либо иного объекта. На рис.1. электронный блок приемника вычисляет ошибку ε(t) между угловым положением объекта 𝛂0(t) и направлением антенны 𝛂(t).

Рис. 1. Система радиолокационного сопровождения. Принципиальная схема
-
Функциональная схема

Рис. 2. Система радиолокационного сопровождения. Функциональная схема
Объектом управления является радар.
-
Структурная схема
Даны следующие значения передаточных функций:
WУс(P)
=

WДв(P)
=


Рис. 3. Система радиолокационного сопровождения. Структурная схема
W𝛂o(P)
=

Таким образом, схема состоит из следующих типовых звеньев:
W1(P)
=
 - апериодическое устойчивое звено;
- апериодическое устойчивое звено;
W2(P)
=
 – интегрирующее звено;
– интегрирующее звено;
W3(P)
=
 =
=
 если
если
 ,
то звено колебательное устойчивое,
иначе это два апериодических звена.
Определим ξ:
,
то звено колебательное устойчивое,
иначе это два апериодических звена.
Определим ξ:

 ,
,
следовательно, можно разложить на 2 апериодических звена:
W3(P)
=
 (*)
(*)
Для вычисления коэффициентов T1, T2 необходимо решить следующее квадратное уравнение:
0,0008P2 + 0.8P + 1 = 0 / (:0.0008)
P2 + 1000 + 1250 = 0 (**)
D = b2 - 4ac = 106 - 4*1250 = 995000 > 0, √D = ±997.5
P1,2
=

P1
=
P2
=
Уравнение (**) раскладывается на произведение сумм:
(P – P1)(P – P2) = 0
(P + 1.252)(P + 998.75) = 0
Необходимо произвести преобразование данного произведения к виду (*):
1.252 (1+0.799P) 998.75 (1 + 0.001P) = 0
Таким образом:
W3(P)
=
 , то есть получается два апериодических
звена
, то есть получается два апериодических
звена
W31(P)
=
 и W32(P)
=
и W32(P)
=

W4(P) = 100 – усилительное звено.
-
Описание системы операторным и дифференциальным уравнениями
Структурные преобразования не требуются.
Передаточная функция для разомкнутой системы:

Рис. 4. Разомкнутая система
W𝛂0(P)
=

W𝛂0(P) = WУс(P) WДв(P)
W𝛂o(P)
=

Передаточная функция для замкнутой системы:

Рис. 5. Замкнутая система
Ф𝛂0(P)
=

Ф𝛂0(P)
=

=
Характеристическое уравнение замкнутой системы, D(P):
D(P) = 0.000004P4 + 0.0048P3 + 0.805P2 + P + 100
Операторное уравнение замкнутой системы:
(P) = Ф𝛂0(P) 𝛂0(P) + Фf(P) f(P), где f(P) – возмущающий сигнал, т.к. f(P) = 0, то получаем следующий вид операторного уравнения:
(P) = Ф𝛂0(P) 𝛂0(P)
(P)
=

D(P) 𝛂(P) = 100 𝛂0(P)
(0.000004P4 + 0.0048P3 + 0.805P2 + P + 100) 𝛂(P) = 100 𝛂0(P)
Производим обратную замену:
P=
Перейдем от операторного вида системы к дифференциальному:

-
Оценка устойчивости САУ
Критерий устойчивости Рауса-Гурвица:
D(P) = 0.000004P4 + 0.0048P3 + 0.805P2 + P + 100
ai
> 0, i
=
 ,
следовательно, необходимое условие
устойчивости выполняется
,
следовательно, необходимое условие
устойчивости выполняется
D(P) = 0
0.000004P4 + 0.0048P3 + 0.805P2 + P + 100 = 0
Составляем матрицу Гурвица:

Δ1 = a1 = 0,0048 >0
Δ2 = a1 a2 – a3 a0 = 0,0048*0,805 – 1*0,000004 = 0,00386 > 0
Δ3
= a3
Δ2
–
a4
 =
a3
Δ2
-
a4
a12
= 1*0,00386 – 100*0,00482
= 0,001556 > 0
=
a3
Δ2
-
a4
a12
= 1*0,00386 – 100*0,00482
= 0,001556 > 0
Δi
> 0, i= ,
следовательно, система устойчива.
,
следовательно, система устойчива.
Критерий устойчивости Найквиста:
W𝛂0(P)
=

W𝛂0(P)
=

Q(P) = P (1+0.005P) (1+0.799P) (1+0.001P)
Q(P) = 0, тогда
P (1+0.005P) (1+0.799P) (1+0.001P) = 0
Корни уравнения Q(P) = 0:
P1 = 0
P2 = -200
P3 = -1.25
P4 = -1000

Рис. 6. Корни уравнения Q(P)=0
Все корни принадлежат левой комплексной полуплоскости (R), следовательно, система устойчива в разомкнутом состоянии.
Построение АФЧХ в среде MatLab:
W𝛂0(P)
=

>> w=tf([100],[0.000004,0.0048,0.805,1,0])
>> nyquist(w)

Рис. 7. АФЧХ. Годограф Найквиста

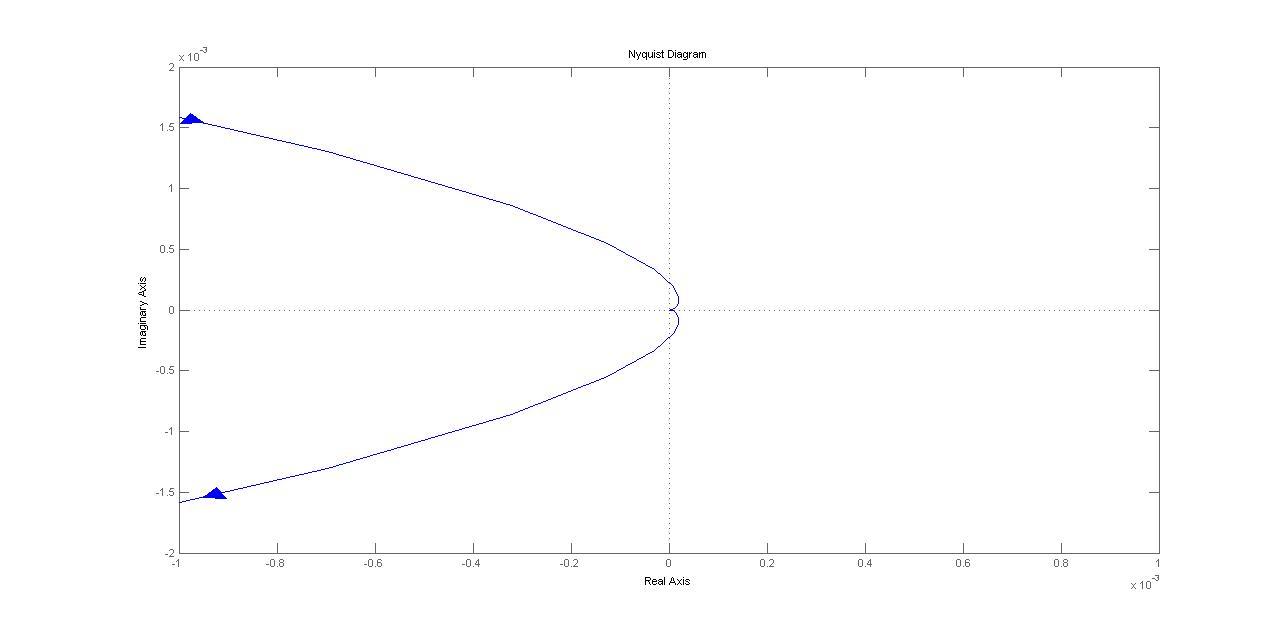
Рис. 8. АФЧХ. Годограф Найквиста. Увеличенный масштаб
Годограф Найквиста не охватывает особую точку (-1; j0), следовательно, система устойчивая.
Построение логарифмической АФЧХ
W1(jω)
=
 , где T=0.005,
тогда ωτ1=
, где T=0.005,
тогда ωτ1= ,
lg(ωτ1)
= 2.3 дек.
,
lg(ωτ1)
= 2.3 дек.
L1(ω)
= 20 lg
Ψ1(ω)
= arctg ( )
)
W2(jω)
=
 :
:
L2(ω)
= -20 lg , где
, где
 =1
=1
Ψ2(ω)
=

W31(jω)
=
 , где
T=0.799, тогда
ωτ31=
, где
T=0.799, тогда
ωτ31= 1,252,
lg(ωτ31)
= 0.097 дек.
1,252,
lg(ωτ31)
= 0.097 дек.
L31(ω)
= 20 lg
Ψ31(ω)
= arctg ( )
)
W32(jω)
=
 , где
T=0.001, тогда
ωτ32=
, где
T=0.001, тогда
ωτ32= 1000,
lg(ωτ32)
= 3 дек.
1000,
lg(ωτ32)
= 3 дек.
L32(ω)
= 20 lg
Ψ32(ω)
= arctg ( )
)
W4(jω) = 100:
L4(ω) = 20 lg100 = 20*2 = 40
Ψ4(ω) = 0
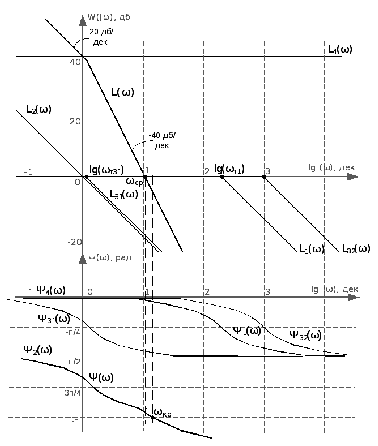
Рис. 9. Логарифмическая АФЧХ
По графику ЛАФЧХ видно, что ωср < ωкр , следовательно, система устойчивая.
-
Построение модели исследуемой системы в среде MatLab
На вход исследуемой системы подается единичное воздействие. Выходной и входной сигналы снимаются с осциллографа
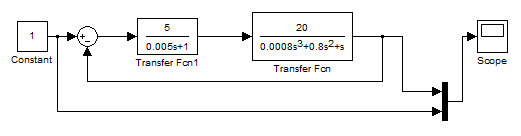
Рис. 10. Модель исследуемой системы в среде MatLab
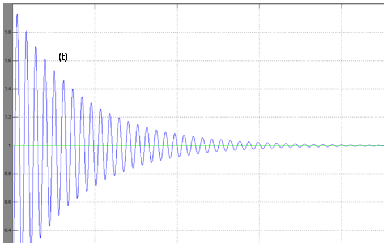
Рис. 11. Реакция исследуемой САУ на единичное воздействие
По переходной характеристике системы видно, что колебания затухают, значит, можно сделать вывод, что система устойчивая.
-
Синтез желаемой структуры САУ
Желаемая структура должна удовлетворять требованиям, заданным в ТЗ:
σ = 40%, тогда M = 1,58
εст = 1,7%
tпп = 1,75 сек
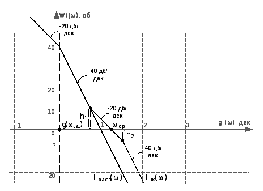
Рис. 12. ЛАФЧХ желаемой (Lж(ω)) и располагаемой ((Lрасп(ω)) структуры.
Область высоких частот мало влияет на характеристику системы, поэтому форма желаемой ЛАФЧХ может будет повторять форму располагаемой ЛАФЧХ. Область нижних частот определяется требованием к точности системы (εст). Область средних частот определяется требованиями к запасу устойчивости и быстродействию системы.
Коэффициент добротности системы по скорости определяется следующим образом:

 =
=

Определение границ области средних частот, M – колебательность системы:


Для того, чтобы система удовлетворяла требованиям ТЗ, в её структуру последовательно включается корректирующее устройство.

Рис. 13. Структурная схема САУ с КУ
ЛАФЧХ последовательного корректирующего устройства получается вычитаем из Lж(ω) Lрасп(ω):
Lку(ω) = Lж(ω) - Lрасп(ω)
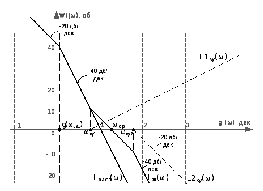
Рис. 14. ЛАФЧХ корректирующего звеньев устройства
 ,
тогда
,
тогда
 .
Данное значение удовлетворяет требованию
ТЗ.
.
Данное значение удовлетворяет требованию
ТЗ.
Из графика видно, что корректирующее устройство состоит из двух типовых звеньев:

 – форсирующее
звено первого порядка
– форсирующее
звено первого порядка
 -
апериодическое устойчивое звено
-
апериодическое устойчивое звено
Определение коэффициентов T1, T2:
 ,
тогда
T1=0.18
,
тогда
T1=0.18
 ,
тогда T2=0.018
,
тогда T2=0.018
Передаточная функция корректирующего устройства принимает следующий вид:
 ,
так как T1>T2
,
то это реальное форсирующее звено.
,
так как T1>T2
,
то это реальное форсирующее звено.

Рис. 14. Структурная схема САУ с вычисленным КУ
-
Построение модели синтезированной системы в среде MatLab

Рис. 15. Модель синтезированной системы в среде MatLab

Рис. 16. Реакция синтезированной САУ на единичное воздействие
По графику определим коэффициент перерегулирования σ:
 ,
где 𝛂max=1.233,
𝛂уст=1,
тогда
,
где 𝛂max=1.233,
𝛂уст=1,
тогда
 .
.
Данное значение меньше заданного в ТЗ, значит, требование к запасу устойчивости выполняется.
Оценка точности синтезированной системы:
εуст , где 𝛂0(t)
– входной сигнал, заданный константой,
равный 1, 𝛂уст
= 1, тогда
, где 𝛂0(t)
– входной сигнал, заданный константой,
равный 1, 𝛂уст
= 1, тогда
 .
Это значение меньше заданного в ТЗ,
следовательно, можно сделать вывод, что
синтезированная система удовлетворяет
требованию к точности.
.
Это значение меньше заданного в ТЗ,
следовательно, можно сделать вывод, что
синтезированная система удовлетворяет
требованию к точности.
Оценка быстродействия синтезированной системы:
tпп
 0,65 сек < 1.75 сек, следовательно,
синтезированная система удовлетворяет
требование к быстродействию.
0,65 сек < 1.75 сек, следовательно,
синтезированная система удовлетворяет
требование к быстродействию.
Таким образом, синтезированная система удовлетворяем всем требованиям ТЗ.