

6 Разработка электрической принципиальной схемы
ПРОЦЕССОРА ИНДИКАТОРА ШИН
Как с технической, так и с экономической стороны индикатор шин удовлетворяет большинству критериев идеального индикатора шин: он простой, высоко-интегрированный, с малыми габаритами. Многие параметры ИШ программно-управляемые, что позволяет заложить в устройство новые возможности. Все это делает индикаторы очень перспективными приборами.
Индикатор шин применяют при настройке и ремонте аппаратных устройств на базе МП К1810ВМ86. Индикатор состоит из микропульта, платы процессора и сорокаштырьковой вилки.
При начальной настройке устройства, когда нет готовых программ в ПЗУ, с помощью подстановки данных можно запрограммировать предусмотренные на плате ВУ и проверить ОЗУ.
Режим подстановки данных позволяет использовать индикатор шин как оценочное устройство при работе с МП К1810ВМ86.
Технические характеристики индикатора шин определяются характеристиками применяемого микропроцессора. Таким образом, индикатор обладает следующими параметрами:
- допустимый диапазон температур -10° С до + 70° С;
- напряжение (питание индикатора шин осуществляется через
соответствующие контакты вилки) + 5 В;
-максимальная тактовая частота 5МГц;
-максимальная потребляемая мощность 15Вт.
Индикатор шин предназначен для аппаратной настройки устройств на основе МП К1810ВМ86.




Рисунок 32 - Общая структура Процессора индикатора шин
Вилка устанавливается в розетку МП настраиваемого устройства. Питание индикатора осуществляется через соответствующие контакты вилки. Плата процессора содержит эмулирующий МП К1810ВМ86, который всеми выводами, за исключением RDY, подключен через плоский кабель длиной 50 мм к вилке индикатора шин. Сигнал RDY, поступающий с платы пользователя, «перехватывается» индикатором для обеспечения пошагового режима работы.
Микропульт соединен с платой процессора пятипроводным кабелем длиной 500 мм. С него в плату процессора поступают в последовательном коде соответствующие команды, а с платы также в последовательном коде выдается в микропульт информация о состоянии шины адреса, данных и управляющих сигналов эмулирующего МП.
Микропульт имеет 10-разрядный цифровой дисплей для отображения адреса, данных и управляющих сигналов МП и четыре клавиши управления работой индикатора шин.
Клавиша «Сброс» предназначена для физического сброса микропульта и платы процессора.
Клавиши «-» и «+» необходимы для перемещения запятой по разрядам цифрового дисплея влево и вправо соответственно, а также для увеличения и уменьшения шестнадцатеричной цифры соответствующего индикатора. Кратковременное нажатие на клавишу «-» или «+» (менее 1/3 с) изменяет значение шестнадцатеричной цифры, а более длительное - перемещает запятую.
Клавиша «Пуск» служит для запуска индикатора шин в работу в выбранном режиме. По сбросу индикатор переходит в исходное состояние и на его правом крайнем индикаторе появляется символ выбранного режима. По нажатию клавиши «-» или «+» последовательно перебираются все возможные режимы работы индикатора шин. После выбора соответствующего режима можно нажать клавишу «Пуск» и перевести индикатор на работу в этом режиме.
Среди возможных режимов работы индикатора шин: Т - пошаговый, G - автоматический, q - полуавтоматический с остановом на контрольной точке, Р - установки контрольной точки, А - перехода по заданному адресу, Н - полуавтоматический с остановом на контрольной точке и подстановкой данных, U - пошаговый с подстановкой данных.
Опрос клавиатуры, управление индикацией и связь с платой процессора по двухпроводной линии осуществляет однокристальная ЭВМ (ОЭВМ) К1810ВМ86 под управлением монитора микропульта «зашитого» в РПЗУ К573РФ2.
Выдачу всех необходимых управляющих сигналов на плату процессора и связь с микропультом по двухпроводной линии обеспечивает ОЭВМ под управлением монитора процессорной платы.
Регистры D12 и D14 предназначены для сохранения адреса по сигналу ALE МП и данных по сигналу ALE35 ОЭВМ, регистр D17 - для сбора информации с управляющих выводов МП, регистры D19 и D20 - для управляющих сигналов в максимальном режиме. На триггере D16 собрана схема управления готовностью в пошаговом режиме.
При установке эмулирующего МП К1810ВМ86 выключатель SA2 необходимо перевести в соответствующее положение. Индикатор шин удобно применять при настройке и ремонте устройств на базе МП К1810ВМ86, прогоняя «зашитую» в РПЗУ программу в автоматическом, пошаговом или полуавтоматическом режиме с остановом на контрольной точке.
Если неисправность заключается в «залипании» отдельных сигналов адреса, данных или управляющих сигналов, то ее удается локализировать за первые же несколько шагов в пошаговом режиме.

Рисунок 33 - Принципиальная схема процессора индикатора шин
Описание работы Процессора индикатора шин представлена на блок-схеме, рисунок 34

Рисунок 34 – Блок-схема работы Процессора индикатора шин
Описывая алгоритм работы индикатора шин видно, что его удобно применять при настройке и ремонте устройств на базе МП К1810ВМ86, прогоняя «зашитую» в РПЗУ программу в автоматическом, пошаговом или полуавтоматическом режиме с остановом на контрольной точке. Управляющая команда поступает из микропульта на плату, затем подается на настраиваемое устройство. Затем идет обратная передача информации от настраиваемого устройства и отображается на дисплее микропульта.
ЗАКЛЮЧЕНИЕ
В ходе курсового проектирования была создана управляющая МПС на базе однокристального микропроцессора К1810ВМ86, удовлетворяющая всем параметрам, заданным в техническом задании.
Разработана подсистема ПДП на базе контроллера КР580ВТ57, подсистема ввода-вывода и светодиодной индикации для ввода значений цифровых датчиков и двоичных кодов и вывода значений функций управляющих воздействий. Создана блок-схема цикла управления, по которой можно написать программу на языке Ассемблера для данного типа микропроцессора.
СПИСОК ИСПОЛЬЗУЕМЫХ ИСТОЧНИКОВ
1 Горбунов В.Л., Панфилов Д.И., Преснухин Д.Л. Микропроцессоры.
Основы построения микроЭВМ. – М.: Высшая школа, 1986.
2 Гуртовцев А.Л., Гудыменко С.В. Программы для микропроцессоров:
справ. пособие. – Минск: Высшая школа, 1989.
3 Корнеев В., Киселев А. Современные микропроцессоры. 3-е издание.
– Санкт-Петербург, 2003.
4 Новиков Ю.В., Скоробогатов П.К. Основы микропроцессорной техни-
ки. – М.: ИНТУИТ. РУ, 2003.
-
Хвощ С.Т., Варлинский Н.Н., Попов Е.А. Микропроцессоры и микро-
ЭВМ в системах автоматического управления: справочник. – Л.: Ма-
шиностроение, 1987.
ПРИЛОЖЕНИЕ А
(обязательное)
Графическая часть
1 Структурная схема микропроцессора К1810ВМ86
2 Уточненная схема микропроцессора К1810ВМ86
3 Блок схема
4 Структурная схема ЭВМ ЕС1834
5 Функциональная схема управляющей микро ЭВМ
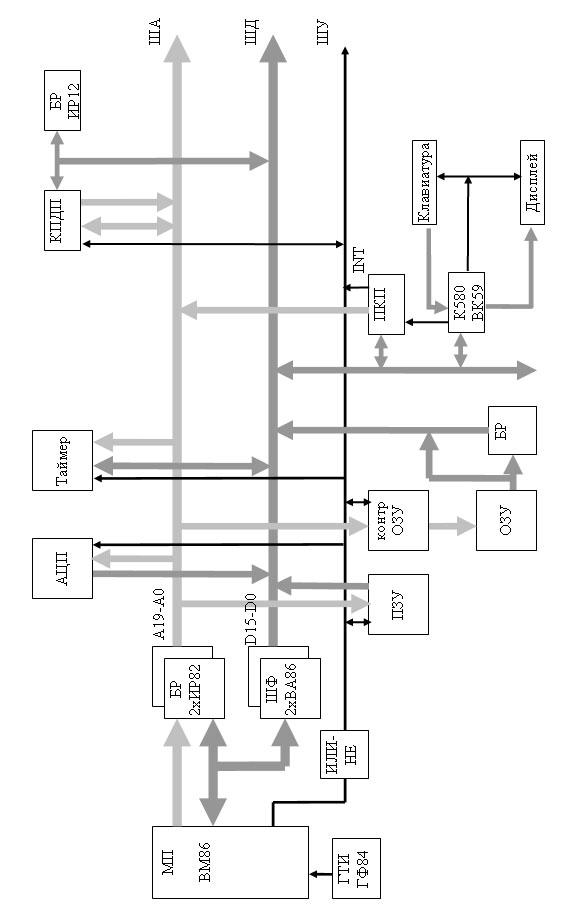
Рисунок 33 – Общая схема управляющей МПС