

§ I7. Аналитические методы расчета переходных процессов
Механические переходные процессы описываются обычно линейными дифференциальными уравнениями первого порядка, решение которых относительно определяемого неизвестного дает функциональную зависимость его от аргумента в виде алгебраического уравнения. Однако следует иметь в виду, что интегрирование дифференциальных уравнений становится возможным только тогда, когда действующие в системе правда моменты, являются постоянными или известно аналитическое выражение зависимости их от угловой скорости двигателя.
Таким образом, при выборе метода расчета переходных процессов основным является ее принцип работы двигателя, а характер механических характеристик электропривода. Для приводов постоянного и переменного тока, работающих на прямолинейных участках механических характеристик, могут быть применены одни и те же метода расчета (расчетные уравнения).
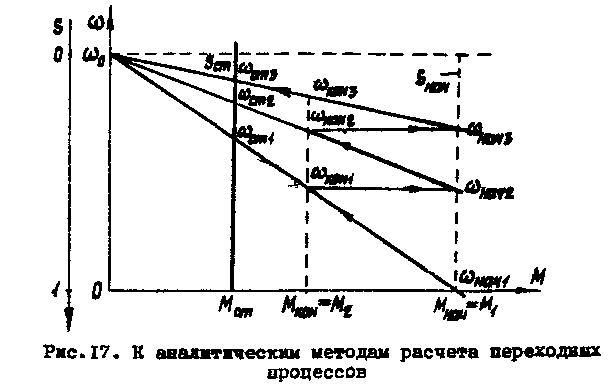
Решение дифференциальных уравнений механического и электрического равновесий электропривода, записанных для разгона двигателя при наиболее часто встречающихся обычных условиях пуска, при МСТ = const и прямолинейных механических характеристиках двигателя (рис. 17) получим в виде выражений изменения:
– скорости

– тока

– момента
– скольжения
Здесь ωНАЧ.Х, IНАЧ.Х, MНАЧ.Х, sНАЧ.Х – параметры электродвигателя, при которых он начинает разгоняться на данной х-й характеристике;
ΩСТ.Х, IСТ.Х, MСТ.Х, sСТ.Х – параметры электродвигателя, соответствующе установившемуся режиму работы на х-й характеристике;
ТМЛ – электромеханическая постоянная, имеющая самостоятельное значение для каждой х-й характеристики (ступени пуска).
Как следует из полученных выражений, на каждой ступени пуска указанные величины изменяются по экспоненциальному закону. Аналогичные законы изменения основных параметров электропривода в переходных режимах можно получить при решении дифференциальных уравнений, описывавших другие (в том числе и тормозные) режимы электропривода.
Расчетные значения скорости, момента и скольжения для получения конечных результатов берут из соответствующих механических характеристик. Соответствующие им токи определяют из выражений:
– для двигателей постоянного тока независимого возбуждения
где Iа – ток в якоре при заданных значениях момента и скорости;
Ra – сопротивление якорной цепи, в которой протекает ток
– дня асинхронных двигателей с фазным ротором
где I1 – ток статора, соответствующий скольжению s и моменту М;
IH, MH, sН.Х. – номинальные значения тока, момента и скольжения при работе двигателя на расчетной х-й характеристике;
I0 – ток холостого хода двигателя, определяемый по формуле
Для определения электромеханической постоянной ТM необходимо знать приведенное к валу двигателя значение момента инерции системы электродвигатель – рабочий механизм JПР. Общую формулу для определения JПР можно записать в следующем виде:

где к = 1,1 - 1,3 - коэффициент, учитывающий инерционность маховых масс элементов кинематической передачи, вращающихся не на валу двигателя;
m – масса поступательно движущихся со скоростью v частей установки;
 –
передаточное
число.
–
передаточное
число.
Следует иметь в виду, что приведенное значение момента инерции JПР изменяется с изменением нагрузки механизма.
Решив любое из уравнений (94) – (97) относительно t, можно определить время изменения величины от начального до конечного значения.
Так, решение уравнения (94) дает
![]() (102)
(102)
а уравнение (96) –
 (103)
(103)
При реостатном пуске двигателя, пользуясь, например, уравнением (94), можно определить время разгона двигателя на каждой пусковой характеристике (ступени). При этом следует иметь в виду, что начальная скорость ωНАЧ = 0 (рис. 17) и что на естественной характеристике (последняя ступень) из уравнения (94) определится время разгона двигателя лишь до скорости ωКОН З, по которой условившийся режим еще не наступает. Двигатель будет продолжать разгоняться до скорости ωСТ З под действием динамического момента МДИН = М – МСТ постепенно уменьшающегося до нуля. Поэтому разгон до конечной скорости, которой на последней ступени является ωСТ, будет продолжаться бесконечно длительное время. Однако с достаточной для практических расчетов точностью переходный процесс считает закончившимся, когда скорость или момент будут отличаться от конечного значения не более чем на 2% от полного изменения величины за время разгона на данной ступени, т.е.
При разгоне из неподвижного состояния ωКОН = 0,98 ωСТ.
Подставив значение ωКОН или МКОН из уравнения (104) или (105) соответственно в уравнение (102) или (103), получим
![]() (106)
(106)
Таким образом, время разгона электропривода на последней ступени пуска следует принимать равным четырехкратному значению постоянной времени ТМ, определенной для этой ступени.
Пользуясь приведенными формулами можно построить графики изменения скорости, момента и тока за время переходного процесса (пуска), т.е.
![]()
Для этого из выражения (102) или (103) определяют время разгона двигателя на каждой ступени от начальной до конечной скорости или изменения момента от МНАЧ до МКОН, которые берут из пусковой диаграммы. Удобно пользоваться внесением (103), так как величины МНАЧ, МКОН, и МСТ для всех ступеней будут иметь одно и то же значение. Тогда

Изменяться же будет лишь величина ТМ, определяемая для каждой х–й ступени из выражений:
- для двигателя с независимым возбуждением
 (107)
(107)
- для асинхронного двигателя (без учета кривизны механических характеристик)
 (108)
(108)
Время разгона на каждой х-й ступени, таким образом, будет
![]() (109)
(109)
Полное время переходного процесса определится как сумма всех tХ, т.e,
При расчете зависимости I = f(t) граничные величины тока находят по поведенным выше уравнениям (98) и (99) для взятых из пусковой диаграммы значений момента и скорости (скольжения).
Промежуточные точки кривых изменения скорости, тока и момента во времени рассчитывают соответственно по (94), (95), (96) и (97). В зависимости от выбранного масштаба и времени работы, на той или иной ступени следует брать две-четыре промежуточные точки.
Аналогично рассчитывают переходные процессы при торможении двигателей, работающих на прямолинейных механических характеристиках.
Прямолинейные механические характеристики, как известно, имеют двигатели постоянного тока с независимым (параллельным) возбуждением. С некоторым приближением можно считать прямолинейными механические характеристики асинхронных двигателей с фазным ротором в пределах нагрузок, не превышающих 0,7 МКР, и особенно при включении в цепь ротора значительных сопротивлений.
Приведенные методы расчета переходных процессов ни в коем случае не применимы к асинхронным двигателям с короткозамкнутым ротором.