

§ 15. Динамическое торможение асинхронных двигателей
Наибольшее распространение в грузовых электроприводах имеет, очевидно, торможение асинхронных двигателей противовключением, которое не требует дополнительных устройств, а осуществляется переключением на обратное вращение. Однако наряду с этим способом достаточно широкое применение находит и динамическое торможение.
Схема включения и физическая сущность процессов, протекающих в асинхронном двигателе в режиме динамического торможения, значительно отличаются от аналогичных показателей других режимов работы двигателя. Для получения этого режима обмотка статора отключается от сети трехфазного переменного тока и включается на пониженное напряжение постоянного тока.
Постоянный ток, протекая по обмотке статора, создает неподвижное в пространстве магнитное поле, которое наводит э. д. с. и ток в обмотке вращающегося ротора. Взаимодействие этого тока с магнитным потоком статора и создает тормозной момент. При этом асинхронный двигатель представляет собой синхронный генератор с неявновыраженными полюсами, работающий при переменной частоте на сопротивление цепи ротора. Однако для расчета механических характеристик асинхронного двигателя при динамическом торможении режим синхронного генератора заменяется режимом асинхронного двигателя с питанием статора вместо постоянного тока IП равнозначным ему по м. д. с. трехфазным переменным током I1. Механические характеристики динамического торможения по форме аналогичны характеристикам двигательного режима, но, в отличие от них, выходят из начала координат и располагаются во втором квадранте координатной плоскости (рис.16).
Р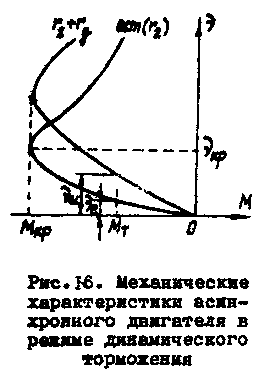 асчет
динамического торможения и построение
механических характеристик без учета
насыщения магнитной системы двигателя
можно осуществить, имея паспортные
(каталожные) данные машины, в том числе
Е2Н
и
I2Н.
При этом возможно ориентировочное
определение активного и индуктивного
сопротивления обмоток двигателя.
асчет
динамического торможения и построение
механических характеристик без учета
насыщения магнитной системы двигателя
можно осуществить, имея паспортные
(каталожные) данные машины, в том числе
Е2Н
и
I2Н.
При этом возможно ориентировочное
определение активного и индуктивного
сопротивления обмоток двигателя.
Активное сопротивление обмотки ротора можно найти из уравнений (74) и (75).
Приведенное значение этого сопротивления будет
![]()
где
 – коэффициент трансформации асинхронного
двигателя.
– коэффициент трансформации асинхронного
двигателя.
С достаточной для ориентировочных расчетов точностью можно принять активное сопротивление статора равным приведенному значению сопротивления ротора, т.е.
![]()
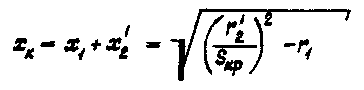
Индуктивное сопротивление короткого замыкания двигателя
В этом уравнении можно принять:
– для асинхронных короткозамкнутых двигателей
![]()
– для двигателей с фазным ротором
![]()
Индуктивное сопротивление цепи намагничивания
![]()
При динамическом торможении используют параметр относительной скорости ν, который аналогичен скольжению s, характеризующему работу асинхронного двигателя:
![]()
Критическое значение относительной скорости двигателя определится из выражения

При выборе νКР для тормозной механической характеристики следует иметь в виду, что наибольший тормозной эффект при определенном МКР имеет место при νКР ≈ 0,41, которую можно получить для двигателя с фазным ротором путем введения в цепь ротора активных добавочных сопротивлений.
Критический, а, следовательно, и тормозной динамический моменты выбираются в зависимости от времени, в течение которого необходимо затормозить привод. Из уравнения критического момента при динамическом торможении
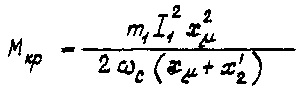
можно определить эквивалентный тормозной ток статора
В зависимости от схемы включения обмотки статора на питание от источника постоянного тока, между трехфазным переменным током I1 и постоянным током IП устанавливается определенное соотношение. Если к источнику постоянного тока подключить два луча звезды обмотки статора, то IП = 1,23I1. При этом к статору подводят напряжение
![]()
где r1 – активное сопротивление одной фазы статора.
Для построения всей механической характеристики асинхронного двигателя при динамическом торможении можно воспользоваться формулой Клосса, записанной для этого режима;

Рассчитанная и построенная для сопротивления r2’ механическая характеристика является естественной. Искусственные характеристики можно рассчитать и построить с помощью соотношения
где R2 = r2 + rД – общее активное сопротивление фазы ротора.