

§ 14. Регулирование скорости двигателей постоянного тока
Для электроприводов тележки грузоподъемных механизмов обычно используются двигатели параллельного возбуждения, и заданные режимы работы они обеспечивают на естественной или реостатных характеристиках.
Механизмы подъема груза, как было отмечено ранее, работают в более сложных условиях, и применяемые для их привода двигатели с последовательным возбуждением не могут обеспечить всех режимов на обычных реостатных характеристиках. Широкое применение в грузовых электроприводах получили схемы комбинированного включения обмоток двигателя с соответствующими сопротивлениями, к каким относятся:
– шунтирование двигателя сопротивлением при наличии общего последовательного сопротивления;
– шунтирование обмотки якоря;
– параллельное
включение обмоток якоря и возбуждения
при наличии общего последовательного
сопротивления.
параллельное
включение обмоток якоря и возбуждения
при наличии общего последовательного
сопротивления.
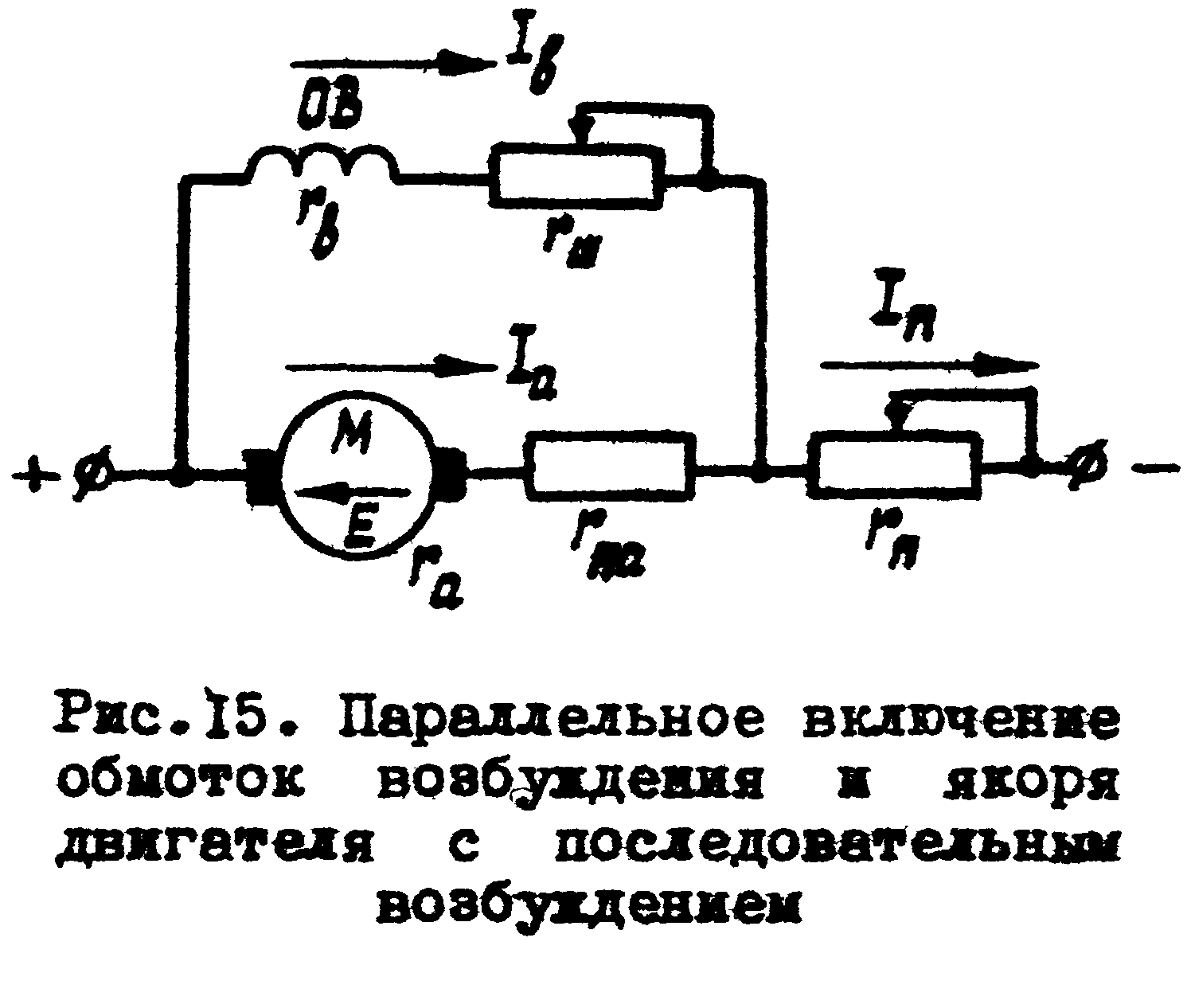
Двигательные режимы при незначительном моменте на валу, а также тормозные режимы, применяемые при опускании тяжелых грузов, можно осуществить двигателем с последовательным возбуждением при параллельном включении обмоток якоря и возбуждения при наличии общего последовательного сопротивления (рис.15). Необходимые механические характеристики можно рассчитать следующим образом.
Работу схемы на рис.15 определяет система уравнений
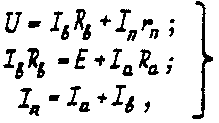
где в соответствии со схемой обозначено:
![]()
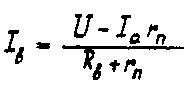
Для выбранного двигателя, очевидно, будут известными напряжение U и сопротивления обмоток rА и rВ. Для получения требуемой характеристики необходимо задаться значениями сопротивлений rШ, rП, rПА. Тогда, решая систему уравнений относительно Е, получим

откуда

Таким образом, задаваясь значениями тока нагрузки IА, можно построить электромеханическую характеристику. Значения сФ при этом можно определить так.
Для заданного значения IА в результате решения первого и третьего уравнений исходной системы найдем IВ:
по которому из кривой намагничивания Ф = f (IВ) определится поток Ф.
Значение постоянного коэффициента с можно определить из номинального режима работы двигателя на естественной характеристике:
![]()
Из кривой намагничивания Ф = f (IН). Тогда
![]()
Пользуясь известным соотношением
![]()
от электромеханической характеристики можно перейти к механической:
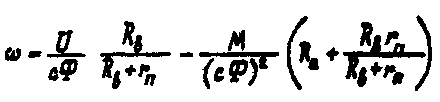
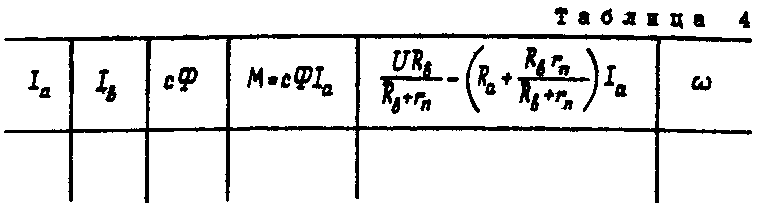
Расчет электромеханической и механической характеристик удобно свести в табл.4.
Задаваясь добавочными сопротивлениями в схеме включения двигателя, следует иметь в виду:
– уменьшение сопротивления rШ вызывает уменьшение скорости идеального холостого хода двигателя и крутизны механической характеристики;
– увеличение сопротивления rП вызывает уменьшение скорости идеального холостого хода ω0 и увеличение крутизны механической характеристики, при rП = ∞ двигатель переходит в режим динамического торможения;
– включение сопротивления rПА, не изменяя скорости ω0, смещает максимум момента из перового квадранта в четвертый.