

Классификация кинематических пар
|
Кинематическая пара и её условное обозначение |
Шар-плоскость
|
Цилиндр-плоскость
|
Сферическая
|
Цилиндрическая
|
Поступательная
|
|
Плоскостная
|
Сферическая
|
Вращательная
|
|||
|
Винтовая
|
|||||
|
|
5/1 |
4/2 |
3/3 |
2/4 |
1/5 |
|
Число степеней свободы / класс пары |
|||||








Кинематические цепи. Систему звеньев, связанных между собой кинематическими парами, называют кинематической цепью. Если звенья совершают движение в одной плоскости, кинематическая цепь будет плоской, в противном случае – пространственной.
В зависимости от строения кинематическая цепь может быть замкнутой и разомкнутой, простой и сложной. В замкнутой кинематической цепи (рис.3.1а, в) каждое звено входит не менее чем в две кинематические пары, в разомкнутой цепи (рис. 3.1б, г) имеются звенья, входящие лишь в одну кинематическую пару.
Простой (рис. 3.1а, б) называют кинематическую цепь, у которой каждое звено входит в соединение с другим звеном с помощью одной или двух кинематических пар. В противном случае цепь называют сложной (рис.3.1 в, г).

Рис. 3.1
3.2. Основные виды механизмов
Исходя из кинематических, конструктивных и функциональных свойств, механизмы подразделяют на:
1. Рычажные (рис. 3.2а, б)– предназначенные для преобразования вращательного движения входного звена в возвратно-поступательное движение выходного звена. Могут передавать большие усилия и мощности.
2. Кулачковые (рис. 3.2в, г) – предназначенные для преобразования вращательного или возвратно-поступательного движения входного звена в возвратно-поступательное или возвратно-вращательное движение выходного звена. Придавая профилям кулачка и толкателя соответствующие очертания всегда можно осуществить любой желательный закон движения толкателя.
3. Зубчатые (рис. 3.2е) – образованные с помощью зубчатых колес. Служат для передачи вращения между неподвижными и подвижными осями. Зубчатые передачи с параллельными осями осуществляются при помощи цилиндрических зубчатых колес, с пересекающимися осями – при помощи конических зубчатых колес, а со скрещивающимися осями – при помощи червяка и червячного колеса.
4. Фрикционные (рис. 3.2д) – движение от ведущего звена к ведомому передается за счет сил трения, возникающих в результате контакта этих звеньев.
3.3. Структурный синтез и анализ механизмов
Структурным синтезом механизма называется проектирование структурной схемы механизма, которая состоит из неподвижного и подвижных звеньев и кинематических пар. Он является начальной стадией составления схемы механизма, удовлетворяющего заданным условиям. Исходными данными обычно являются виды движения ведущего и рабочего звеньев механизма, взаимное расположение осей вращения и направления поступательного движения звеньев, их угловые и линейные перемещения, скорости и ускорения.Наиболее удобным методом нахождения структурной схемы является метод присоединения структурных групп Ассура к ведущему звену или основному механизму.

Рис. 3.2
Под структурным анализом механизма понимается определение количества звеньев и кинематических пар, определение степени подвижности механизма, а также установление класса и порядка механизма.
Степень подвижности пространственного механизма определяется по формуле Сомова - Малышева:
W = 6n – (5P1 +4P2 + 3P3 + 2P4 + P5), (3.1)
где Р1, Р2, Р3, Р4, Р5 - число одно-, двух-,трех-, четырех- и пятиподвижных кинематических пар; n – число подвижных звеньев.
Степень подвижности плоского механизма определяется по формуле Чебышева:
W = 3n – 2PH – PB, (3.2)
где РН – число низших, а РВ – число высших кинематических пар.
В качестве примера рассмотрим четырехзвенный механизм рулевого управления автопилота (рис. 3.3): звенья 1 и 2 образуют цилиндрическую пару четвертого класса, имеющую две степени свободы; звенья 2-3 и 4-1 образуют вращательные пары пятого класса, имеющие одну степень свободы;
звенья 3-4 образуют шаровую пару третьего класса, имеющую три степени свободы; число подвижных звеньев равно трем, тогда
W = 6·3 - 2·5 - 1·4 - 1·3 = 1
С


Рис. 3.3
Кинематическая цепь, число степеней свободы которой относительно элементов ее внешних кинематических пар равно нулю, называют структурной группой Ассура, по имени Л.В. Ассура, который впервые фундаментально исследовал и предложил структурную классификацию плоских стержневых механизмов. Пример образования плоского шестизвенного механизма дан на рис.3.4.
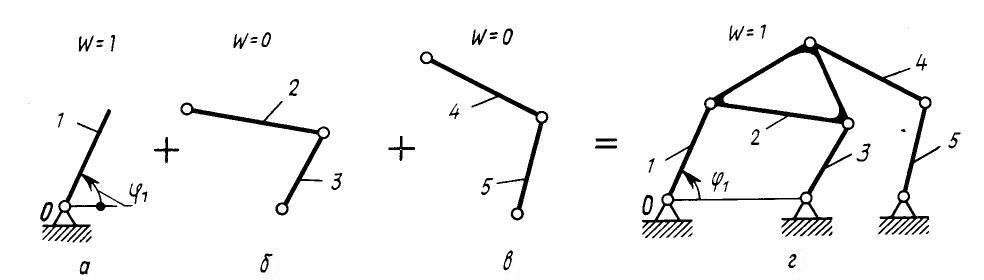
Рис. 3.4
Структурные группы подразделяют по классу и порядку. Класс группы определяется максимальным числом кинематических пар входящих в одно звено (рис. 3.5).

Рис. 3.5
Порядок группы определяется числом элементов, которыми группа присоединяется к основному механизму (рис. 3.6).

Рис. 3.6
Класс и порядок механизма зависят от того, какое звено является ведущим.