

-
Расчет скоростей
Расчет скоростей производится для всех двенадцати положений механизма. Рассчитываются линейные и угловые скорости всех звеньев, а также скорости центров масс.
Расчет скоростей и построение планов проведем для положения №1 механизма.
Угловая скорость кривошипа:
![]() 1/с.
1/с.
Используя значение угловой скорости кривошипа, определяем скорость точки А:
![]() .
.
![]() м/с.
м/с.
Запишем векторное уравнение для скорости точки В:
![]() .
(2.1)
.
(2.1)
В этом уравнении нам известны направления векторов скоростей VB, VA, VAB. Скорость точки В направлена по направляющей t-t, скорость точки А направлена перпендикулярно кривошипу ОА, а скорость звена АВ направлена перпендикулярно этому звену. Зная направления скоростей и значение скорости точки А, решим уравнение (1) графически. Для этого изначально определим значение масштабного коэффициента, который необходим для построений. Он определяется аналогично масштабному коэффициенту, найденному в п. 2.1.1:
![]() ,
,
где pva – отрезок, изображающий скорость точки А на плане скоростей (pva выбирается произвольно).
![]()
![]() .
.
После определении масштабного коэффициента решаем векторное уравнение (2.1) (рис. 2.1.2). Для этого отмечем точку pv – полюс, из него проводим отрезок pva, равный значению скорости точки А и направленный перпендикулярно кривошипу ОА. Из конца построенного отрезка проводим линию действия относительной скорости, который направлен перпендикулярно АВ, в точке пересечения этого вектора с направляющей t-t, будет находиться точка b. Вектор pvb определяет скорость точки В, он направлен из полюса pv.
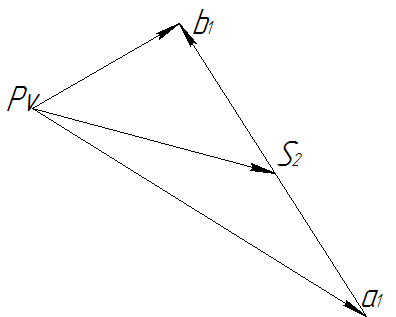
Рис. 2.1.2. План скоростей для положения №1
Численное значение скоростей определим, измерив, полученные отрезки и перемножив их на масштабный коэффициент:
![]() ,
(2.2)
,
(2.2)
![]() .
(2.3)
.
(2.3)
![]() м/с,
м/с,
![]() м/с.
м/с.
Угловые скорости рассчитаем по формулам:
![]() ,
,![]() 1/с (2.4)
1/с (2.4)
где
![]() - длина шатуна (м).
- длина шатуна (м).
Положения центров масс на плане скоростей будут определяться по принципу подобия.
![]() ,
(2.5)
,
(2.5)
![]() мм.
мм.
Численное значение скоростей центров масс определим, измерив, отрезки, соединяющие точки центров масс и полюс, и перемножив их на масштабный коэффициент:
![]() м/с,
(2.6)
м/с,
(2.6)
В данной работе выполняется расчет скоростей для всех двенадцати положений. Расчет производится аналогично рассмотренному положению. Вектора всех скоростей выходят из одного полюса. Результаты расчета (полный план скоростей) представлен на первом листе графической части проекта. Значения всех скоростей звеньев механизма и точек звеньев представлены в таблице 2.
Таблица 2
|
|
VA |
VAB |
VB |
VS2 |
ω1 |
ω2 |
|
|
м/с |
1/с |
||||
|
0 |
8,17 |
8,30 |
0,50 |
4,40 |
19 |
5,03 |
|
1 |
7,50 |
3,40 |
5,30 |
4,55 |
||
|
2 |
4,80 |
6,30 |
7,00 |
2,91 |
||
|
3 |
0,90 |
8,10 |
8,10 |
0,55 |
||
|
4 |
3,30 |
7,80 |
7,80 |
2,00 |
||
|
5 |
6,60 |
5,00 |
6,10 |
4,00 |
||
|
6 |
9,10 |
4,70 |
6,90 |
5,52 |
||
|
7 |
7,70 |
5,10 |
5,70 |
4,67 |
||
|
8 |
5,20 |
8,30 |
7,90 |
3,15 |
||
|
9 |
1,00 |
8,50 |
8,30 |
0,61 |
||
|
10 |
3,50 |
6,20 |
7,10 |
2,12 |
||
|
11 |
6,80 |
2,80 |
5,30 |
4,12 |
||