

-
Плоское напряженное состояние
![]()
Ключевые слова: экстремальные напряжения, тензор деформации.
Рассмотрим важный для приложений случай плоского напряженного состояния, реализуемого, например, в плоскости Oyz. Тензор напряжений в этом случае имеет вид
Геометрическая иллюстрация представлена
на рис.1.
При этом площадки х=const являются
главными с соответствующими нулевыми
главными напряжениями. Инварианты
тензора напряжений равны
![]() ,
а характеристическое уравнение принимает
вид
,
а характеристическое уравнение принимает
вид
![]()
Корни этого уравнения равны
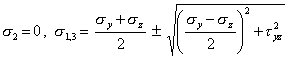
(1)
Нумерация корней произведена для случая 1>0, 1<0.
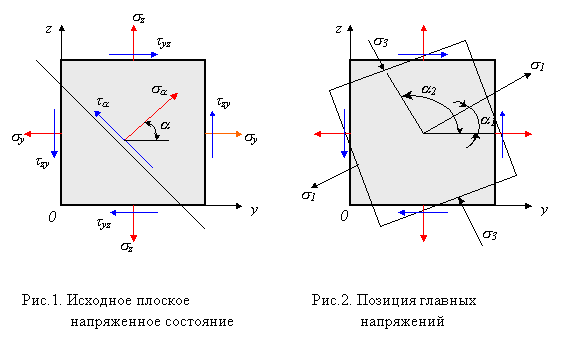
Произвольная площадка характеризуется углом на рис. 1, при этом вектор n имеет компоненты: ny=cos, nz=sin, nх=0. Нормальное и касательное напряжения на наклонной площадке выражаются через угол следующим образом:
![]()
(2)
![]()
(3)
Так как на главных площадках касательное напряжение отсутствует, то, приравнивая нулю выражение (3), получим уравнение для определения угла a между нормалью n и осью Оу
![]()
(4)
Наименьший положительный корень уравнения (4) обозначим через 1. Так как tg(х)-периодическая функция с периодом , то имеем два взаимно ортогональных направления, составляющие углы 1 и 2=1 + /2 с осью Оу. Эти направления соответствуют взаимно перпендикулярным главным площадкам (рис. 2).
Если продифференцировать соотношение (2) по и приравнять производную нулю, то придем к уравнению (4), что доказывает экстремальность главных напряжений.
Для нахождения ориентации площадок с экстремальными касательными напряжениями приравняем нулю производную от выражения
![]()
откуда получим
![]()
(5)
Сравнивая соотношения (4) и (5), находим, что
![]()
Это равенство возможно, если углы 2
и 2
отличаются на угол /2.
Следовательно, н аправления
площадок с экстремальными касательными
напряжениями отличаются от направлений
главных площадок на угол /4
(рис.
3).
аправления
площадок с экстремальными касательными
напряжениями отличаются от направлений
главных площадок на угол /4
(рис.
3).
Величины экстремальных касательных напряжений получим после подстановки (5) в соотношение (3) с использованием формул
![]()
После некоторых преобразований получим
![]()
Сравнивая это выражение с полученными ранее значениями главных напряжений (1), выразим экстремальные касательные напряжения через главные напряжения
![]()
Аналогичная подстановка в (2) приводит к выражению для нормальных напряжений на площадках с
![]()
Полученные соотношения позволяют проводить направленно-ориентированный расчет конструкций на прочность в случае плоского напряженного состояния.
Тензор деформации
Рассмотрим вначале случай плоской деформации (рис. 4). Пусть плоский элемент MNPQ перемещается в пределах плоскости и деформируется (изменяет форму и размеры). Координаты точек элемента до и после деформации отмечены на рисунке.
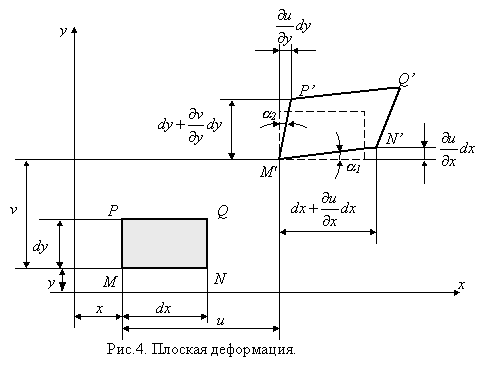
По определению относительная линейная деформация в точке М в направлении оси Ох равна
![]()
Из рис. 4 следует
Учитывая, что MN=dx, получим
В случае малых деформаций, когда (дu/дх)<<1, (дv/дх)<< 1, можно пренебречь квадратичными слагаемыми. С учетом приближенного соотношения
![]()
справедливого при x<<1, окончательно для малой деформации получим
![]()
Угловая деформация xy определяется как сумма углов 1 и 2 (4). В случае малых деформаций
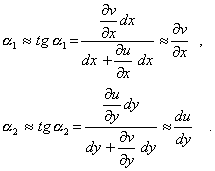
Для угловой деформации xy имеем
![]()
Проводя аналогичные выкладки в общем случае трехмерной деформации, имеем девять соотношений
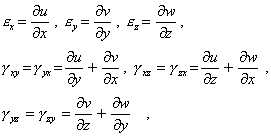
(6)
связывающих линейные и угловые деформации с перемещениями. Эти соотношения носят название соотношений Коши.
Три линейных и шесть угловых деформаций (6) образуют тензор малых деформаций
(7)
Этот тензор полностью определяет деформированное состояние твердого тела. Он обладает теми же свойствами, что и тензор напряжений. Свойство симметрии непосредственно следует из определения угловых деформаций. Главные значения и главные направления, а также экстремальные значения угловых деформаций и соответствующие им направления находятся теми же методами, что и для тензора напряжений.
Инварианты тензора деформаций определяются аналогичными формулами, причем первый инвариант тензора малых деформаций имеет ясный физический смысл. До деформации его объем равен dV0=dxdydz. Если пренебречь деформациями сдвига, которые изменяют форму, а не объем, то после деформации ребра будут иметь размеры
![]()
(рис. 4), а его объем будет равен
![]()
Относительное изменение объема
![]()
в пределах малых деформаций составит
![]()
что совпадает с определением первого инварианта. Очевидно, что изменение объема есть физическая величина, не зависящая от выбора системы координат.
Так же, как и тензор напряжений, тензор деформаций можно разложить на шаровой тензор и девиатор. При этом первый инвариант девиатора равен нулю, т. е. девиатор характеризует деформацию тела без изменения его объема.