Введение
Совокупность сведений о целях, получаемых методами радиолокации, называют радиолокационной информацией. К радиолокационной информации относят сам факт наличия целей, их количество, координаты, классы и др.
Технические средства, предназначенные для получения радиолокационной информации, называют радиолокационными станциями (РЛС) или радиолокаторами.
Радиолокационные станции (РЛС) используются в качестве технических средств получения информации. Они предназначены для непрерывного, точного определения координат летательных аппаратов, наземных и надводных объектов.
Помехозащищенность – это способность РЛС противостоять радиотехнической разведке противника (скрытность работы) и выполнять свои функции в условиях радиопомех (помехоустойчивость). По способу создания и воздействия на РЛС радиопомехи делятся на активные (мешающие излучения) и пассивные (мешающие отражения). Как активные, так и пассивные помехи могут быть не только умышленными, но и естественными. К естественным активным помехам относятся шумы космического происхождения и атмосферного происхождения, внутренние шумы космического и атмосферного происхождения, внутренние шумы радиоприемных устройств и взаимные помехи между РЛС и другими РЭС. Возможность работы радиосредств без взаимных помех часто оценивается отдельно от других видов помех и называется электромагнитной совместимостью. Пассивные помехи естественного происхождения возникают из-за отражения зондирующего сигнала РЛС от окружающих станцию объектов: местных предметов (складок местности, строений, деревьев), гидрометеоров (дождь, снег, град, облака) и т.д.
Для РЛС военного назначения радиопомехи умышленно создаются противником с помощью специальных средств радиоэлектронного подавления, к которым относятся станции (передатчики) активных помех и специальные противолокационные отражатели, доставляемые в зону действия РЛС.
Помехозащищенность РЛС достигается соответствующим выбором принципов построения РЛС. Технических характеристик основных систем, применением специальных методов и устройств защиты РЛС от помех и проведением совокупности организационных мероприятий по обеспечению скрытности работы и устранению взаимных помех.
Радиоэлектронные помехи – непоражающие, мешающие электро-магнитные и акустические излучения, ухудшающие качество функционирования радиоэлектронных средств (РЭС), управляемого оружия и военной техники иди систем обработки информации.
Воздействуя на приемные устройства, помехи имитируют или искажают наблюдаемые или регистрируемые оконечной аппаратурой сигналы или изображения, затрудняют или искажают выделение полезной информации, ведение радиопереговоров и обнаружение целей с помощью РЭС, снижают их дальность действия и точность работы автоматических систем управления. При действии помех РЭС и системы могут перестать быть источниками информации, несмотря на их полную исправность и работоспособность.
Исходные данные
|
Вариант |
16 |
|
Тип цели |
F-117A |
|
Условная вероятность ложной тревоги F |
10-4 |
|
Условная вероятность правильного обнаружения Дц |
0,85 |
|
Мах. дальность действия РЛС Дmax |
100 км |
|
Разрешающая способность по дальности δД |
150м |
|
Разрешающая способность по азимуту δβ |
1° |
|
Разрешающая способность по углу места δg |
1º |
|
Спектральная плотность АШП, приведенная ко входу приемного устройства РЛС N n |
15 Вт/МГц |
|
Темп сброса стандартных пачек дипольных отражателей m100 |
3 |
-
Выбор и обоснование зондирующего сигнала.
Зондирующий сигнал - радиосигнал, излучаемый антенной радиолокационной станции. Часто З. с. имеет форму импульса. Структура импульса и его длительность (от 0,01 мксек до 1 мсек) зависят от назначения станции. По времени запаздывания отражённого от объекта сигнала (эхо-сигнала) относительно зондирующего определяют в радиолокации расстояние до объекта. Для радиолокационного наблюдения используют: эхо-сигналы, образующиеся в результате отражения радиоволн от объекта, облученного РЛС (т. н. Р. с зондирующим излучением); сигналы РЛС, переизлучаемые ретранслирующим устройством, находящимся на объекте, местоположение которого определяется (Р. с активным ответом); собственное радиоизлучение объекта - излучение радиоустройств, находящихся на объекте, или тепловое излучение самого объекта, определяющееся его температурой (пассивная радиолокация) . Отсутствие излучения зондирующего сигнала повышает скрытность работы, существенно затрудняет обнаружение пассивных радиолокационных станций (РЛС) и создание им помех.
Сигналы бывают простыми и сложными.
Основными достоинствами сложных радиосигналов по сравнению с простыми являются:
1) часть рассеянной целью электромагнитной
энергии возвращается к радиоприёмному
устройству РЛС возможность наблюдения любых
радиоконтрастных объектов, высокая
информационная способность
радиолокационного сигнала, возможность
измерения дальности до цели по времени
запаздывания сигнала;
возможность наблюдения любых
радиоконтрастных объектов, высокая
информационная способность
радиолокационного сигнала, возможность
измерения дальности до цели по времени
запаздывания сигнала;
2) большая дальность наблюдения малоразмерных целей;
3) возможность кодирования запросного и ответного сигналов для получения дополнительной информации о цели (о бортовом номере самолета, количестве топлива, высоте полета и т.п.);
4) возможность наблюдения любых радиоконтрастных объектов, высокая информационная способность радиолокационного сигнала, возможность измерения дальности до цели по времени запаздывания сигнала.
Известно, что разрешающая способность
по дальности равна: δ

τu – длительность импульса для простого радиоимпульса
τсл – длительность сложного импульса.
Рассчитаем эффективную ширину АЧС зондирующего сигнала:
 Гц,
Гц,
а далее длительность одиночного радиоимпульса на выходе оптимального фильтра
 м/сек
м/сек
Расчет периода следования импульсов проводится по следующей формуле:
 сек
сек
где Dmax – приборная дальность (известно из условия).
По условию вероятность правильного обнаружения D и ложной тревоги(F) на выходе оптимального фильтра определим отношение сигнал-шум q (график №1 задания).

Рассчитаем пороговое значение коэффициента различимости приведенного по входу приемного устройства:

Реальный коэффициент различимости (γр), который дает возможность оценить реальную минимальную энергию на входе приемного устройства, при которой цель обнаруживается с показателем качества не ниже заданных и с учетом потерь в трактах РЛС(αε) и числом накапливаемых импульсов (L).
 ,
,
где αε на практике
 [ДБ]
[ДБ]
 [ДБ]=10 [раз]
[ДБ]=10 [раз]
αнак – коэффициент
накопления. На её величину основным
образом влияет коэффициент потерь
оператора, который может принимать
значение
 [ДБ].
[ДБ].
Его можно исключить с помощью применения в РЛС в качестве накопителя и порогового устройства цифровой обнаружитель цели, а не индикатор кругового обзора и глаз оператора, т.о. можно пренебречь и величиной αнак;
– αУПЧ = 0,8 [ДБ] – коэффициент потерь, учитывающий проигрыш в отношении с/ш на выходе квазиоптимального фильтра по сравнению с оптимальным фильтром;
– αПЧ = 2 [ДБ] – коэффициент потерь при преобразовании частоты;
– αВУ = 1 [ДБ] – коэффициент потерь в высокочастотном тракте.
Получим – αε = 10 [ДБ] = 10 [раз]
L – число накапливаемых импульсов
 ,
где
,
где
 –
разрешающая способность РЛС по азимуту;
–
разрешающая способность РЛС по азимуту;
 –
скорость вращения антенны РЛС в
угломестной плоскости, зададимся (~15
об/мин)
–
скорость вращения антенны РЛС в
угломестной плоскости, зададимся (~15
об/мин)
 –
период следования зондирующего импульса.
–
период следования зондирующего импульса.
Определяем вид зондирующего сигнала.
Принимая во внимание преимущество сложных сигналов на простыми, остановимся на выборе сложного. Одной из характеристик сложного сигнала является база.
Определим ее значение для поставленной задачи.
Запишем основное управление радиолокации:


где
 –
максимальное значение дальности действия
РЛС;
–
максимальное значение дальности действия
РЛС;
 –
эффективная поверхность антенны РЛС,
определяется реальной поверхностью
антенны РЛС, которая в свою очередь
равна (0,6–0,8) от реальной площади антенны.
–
эффективная поверхность антенны РЛС,
определяется реальной поверхностью
антенны РЛС, которая в свою очередь
равна (0,6–0,8) от реальной площади антенны.
 ,
,
где
 –
линейные размеры антенны по β,ε
–
линейные размеры антенны по β,ε
k=
Задаемся λ=0,5
 и
и
 ,
находим
,
находим
 м2
м2
 м2
м2
– –
коэф. усиления антенны РЛС.
–
коэф. усиления антенны РЛС.

– –
средняя ЭПР цели для истребителей.
–
средняя ЭПР цели для истребителей.
– ,
,
где k=1,38·10-23– коэф. Больцмана
kш– коэф. шума генераторного прибора.
В зависимости от длины волны в качестве генераторного прибора возьмем……
Коэф. шума определяется по графику 2 задания;
–Т– абсолютная температура, при нормальных условиях (20º С=293 К);
–N0– спектральная плотность мощности шумов на входе приемного устройства;
–Эи– энергия зондирующего сигнала (для сложного сигнала)
 ,
,
где Ри– импульсная мощность, ее значение ограничено вероятностью пробоя волноводного тракта РЛС и не превышает 200 кВт.
Принимаем значение Ри=195 кВт.
Находим В путем подстановки найденных значений в основное уравнение радиолокации.

Вывод: в качестве зондирующего
сигнала, удовлетворяющего всем исходным
данным, в данной работе выбран сложный
сигнал линейно частотной модуляции с
 км.
км.
Выбор такого сигнала при заданном объеме обозреваемого пространства, не ухудшает свойств РЛС, то есть можно выбрать передающее устройство состоящее или из большого количества маломощных элементов, или из малого числа элементов большой мощности. Кроме того, рассчитаны и другие характеристики зондирующего сигнала:
– с;
с;
– км;
км;
– м;
м;
– кВт.
кВт.
Исходя из этих характеристик, выбираем ЛЧМ сигнал .
Достоинство этого сигнала в том, что
часть рассеянной целью электромагнитной
энергии возвращается к радиоприёмному
устройству РЛС возможность наблюдения любых
радиоконтрастных объектов, высокая
информационная способность
радиолокационного сигнала, возможность
измерения дальности до цели по времени
запаздывания сигнала.
возможность наблюдения любых
радиоконтрастных объектов, высокая
информационная способность
радиолокационного сигнала, возможность
измерения дальности до цели по времени
запаздывания сигнала.
1.2. Выбор и обоснование передающего устройства.
В качестве передающего устройства выбираем РПдУ. Так как радиолокационные передатчики являются составной частью радиолокационных станций и предназначены для генерирования импульсов высокочастотной энергии заданной несущей частоты и мощности.
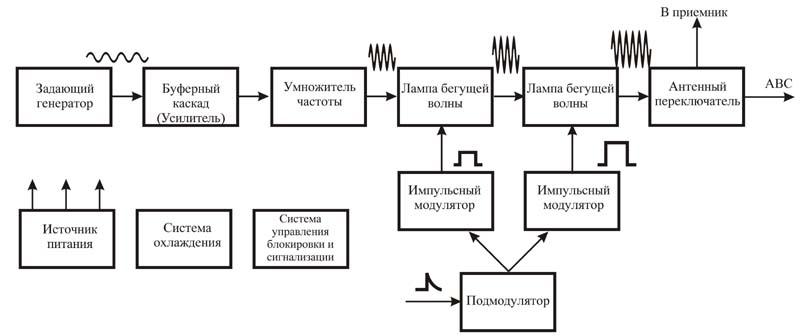
Подавляющее большинство современных РЛС работает в импульсном режиме в сантиметровом и дециметровом диапазонх волн. Основными элементами передатчика импульсной РЛС являются генератор, модулятор и источники питания.
В зависимости от состава генератора (однокаскадный или многокаскадный) различают однокаскадные и многокаскадные передающие устройства ( РПдУ).
В однокаскадном РПдУ в качестве генератора используется автогенератор (задающий генератор) магнетронного типа.
Генератор
СВЧ вырабатывает радиоимпульсы
длительностью от десятых долей
микросекунды до десятков микросекунд.
Период повторения импульсов больше
длительности импульса в сотни и тысячи
раз .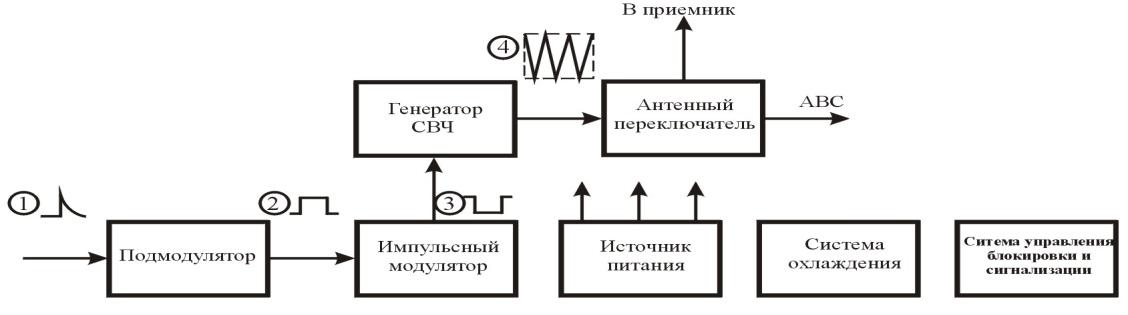
Импульсный модулятор в РПдУ предназначен для управления СВЧ-генератором. В нем накапливается энергия, потребляемая от источника питания, в качестве которого обычно применяется высоковольтный выпрямитель.
С выхода модулятора импульс постоянного напряжения величиной в десятки киловольт подается на катод магнетрона (генератора СВЧ) и последний вырабатывает радиоимпульс такой же длительности.
Антенный переключатель во время излучения радиоимпульса подключает антенну к выходу СВЧ- генератора, вход приемника в это время блокируется.
Один или несколько подмодулятотров служат для преобразования маломощных импульсов синхронизации в импульсы требуемой амплитуды и длительности, необходимые для отпирания модуляторных ламп, то есть управления работой самих модуляторов.
Жидкостная или воздушная система охлаждения РПдУ обеспечивает оптимальный температурный режим работы передатчика.
Система управления, блокировки и сигнализации обеспечивает:
-
Установленный порядок включения и выключения передатчика;
-
Безопасность обращения с РПдУ для обслуживающего персонала;
-
Сигнализацию о неисправности состояния передатчика.
Недостатком рассмотренной однокаскадной схемы РПдУ импульсной РЛС является трудность получения высокой стабильности частоты колебаний и невозможность наращивания выходной мощности. Относительное отклонение частоты составляет = 10 -5, мощность на выходе – от долей до миллионов ватт.
Отмеченные
недостатки устранены в многока Системы
защиты импульсных РЛС от пассивных
помех основаны на использовании различия
в скорости перемещения пассивных
помех (отражателей) и цели, так как при
облучении движущихся целей происходит
изменение структуры отраженного сигнала
по сравнению с сигналом, отраженным от
пассивных помех (частота, ширина спектра
сигнала, период посылок, длительность
импульса).