

3.4.Переход к новому базису.
Пусть b=(![]() )
и b'=(
)
и b'=(![]() )
старый и новый базисы линейного векторного
пространства Rn.
Каждый из векторов нового базиса можно
выразить в виде линейной комбинации
векторов старого базиса:
)
старый и новый базисы линейного векторного
пространства Rn.
Каждый из векторов нового базиса можно
выразить в виде линейной комбинации
векторов старого базиса:
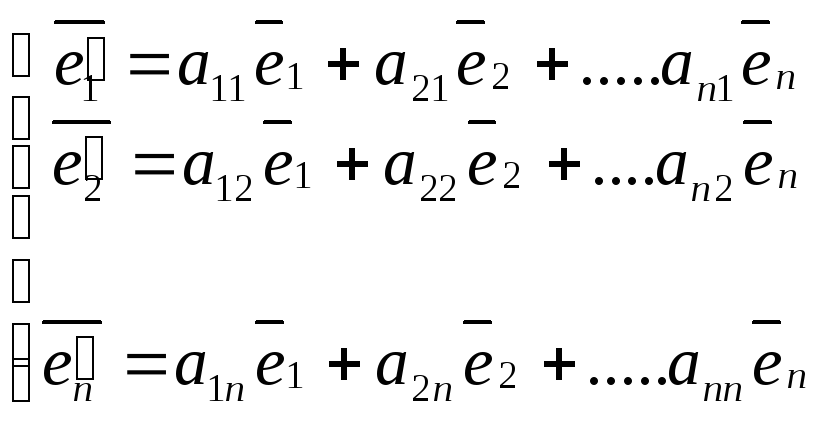
Или

Или в сокращенной матричной форме:
![]() ,где
,где

T - называется матрицей
перехода от старого базиса![]() к новому
к новому
![]() .
Следует обратить внимание на то, что
координаты разложения нового базиса
по старому базису располагаются в
матрице перехода по столбцам. Матрица
перехода от нового базиса к старому
имеет вид:
.
Следует обратить внимание на то, что
координаты разложения нового базиса
по старому базису располагаются в
матрице перехода по столбцам. Матрица
перехода от нового базиса к старому
имеет вид:
T-1; B =B′ ·T-1;
Найдем зависимость между координатами вектора в разных базисах. Пусть некоторый вектор x имеет координаты (x1 x2 …хn) в старом и (x'1, x'2,...x'n) в новом, тогда
![]()
Подставив сюда разложение векторов (
![]() )
по базису(
)
по базису(
![]() ),получим:
),получим:
![]()
+![]()
![]()
Перенесем все влево и сгруппируем
слагаемые с одинаковыми сомножителями![]()
![]()
![]()
Это равенство выполняется при условии,
что все коэффициенты перед
![]() равны 0. следовательно:
равны 0. следовательно:
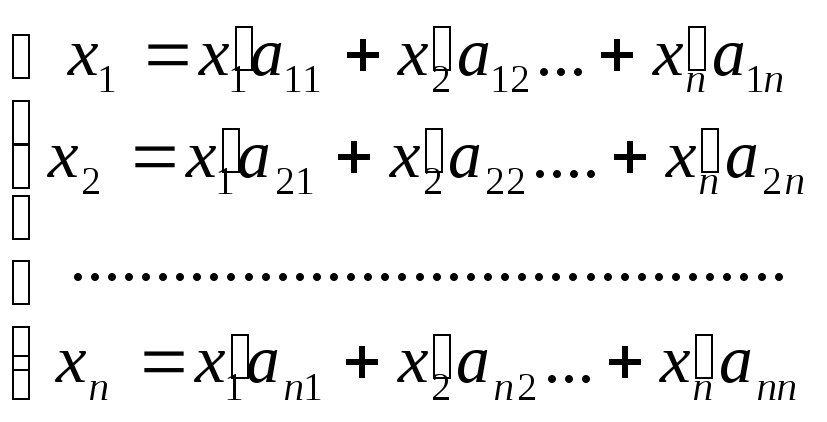
Или в матричной форме:
 или
X=TX1
или
X=TX1
3.5. Линейные операторы.
Пусть Rn1
Rm2-линейные
пространства размерности n
и m. Если задан
закон (правило),по которому каждому
вектору x пространства
Rn1
ставится в соответствии и единственный
вектор y пространства
Rm2,
то говорят, что задан оператор
![]() действующий
из Rn1
в Rm2
и записывают эту операцию
действующий
из Rn1
в Rm2
и записывают эту операцию
![]() .
Оператор называется линейным,
если для любых векторов x
и y пространства
Rn
и любого числа λ выполняются
соотношения:
.
Оператор называется линейным,
если для любых векторов x
и y пространства
Rn
и любого числа λ выполняются
соотношения:
1)![]()
2)![]()
Вектор![]() -называется
образом вектора
-называется
образом вектора
![]() ,а
сам вектор
,а
сам вектор![]() –прообразом
вектора
–прообразом
вектора
![]() .
.
Если пространства Rn1
и R m
2 совпадают, то оператор
![]() отображает пространство Rn1
в себя. Именно такие операторы мы и будем
рассматривать.
отображает пространство Rn1
в себя. Именно такие операторы мы и будем
рассматривать.
Пусть в пространстве Rn
задан базис(![]() 1,
1,
![]() 2,..
2,..
![]() n).Произвольный
вектор
n).Произвольный
вектор
![]() может быть разложен по этому базису:
может быть разложен по этому базису:
![]()
Выясним, что собой представляет оператор
![]() ,
для этого подействуем на вектор
,
для этого подействуем на вектор
![]() оператором
оператором
![]() :
:
![]()
Поскольку
![]() (i=1,2..n)
является вектором Rn
то их также можно разложить по базису
(
(i=1,2..n)
является вектором Rn
то их также можно разложить по базису
(![]() 1,
1,
![]() 2,..
2,..
![]() n):
n):
![]() и
тогда
и
тогда
![]() (1)
(1)
С дpугой стороны
![]() по
определению, есть некоторый вектор
по
определению, есть некоторый вектор
![]() ,
и имеет в том же базисе (
,
и имеет в том же базисе (![]() 1,
1,
![]() 2,..
2,..
![]() n),
координаты y1,y2...yn
и поэтому он может быть разложен по
этому базису:
n),
координаты y1,y2...yn
и поэтому он может быть разложен по
этому базису:
![]() (2)
(2)
Разложение вектора
![]() по базису единственно, поэтому правые
части (1) и (2) равны следовательно:
по базису единственно, поэтому правые
части (1) и (2) равны следовательно:


Или в матричной форме
![]()
Таким образом, действие линейного
оператора на вектор
![]() сводится
к умножению некоторой матрицы P=(
сводится
к умножению некоторой матрицы P=(![]() ij)
на матрицу столбец, составленный из
координат вектора
ij)
на матрицу столбец, составленный из
координат вектора
![]() .
Матрица P
называется матрицей линейного оператора
.
Матрица P
называется матрицей линейного оператора
![]() в базисе (
в базисе (![]() 1,
1,
![]() 2,..
2,..![]() n),
а ранг матрицы рангом оператора
n),
а ранг матрицы рангом оператора
![]() .
Таким образом, каждому линейному
оператору соответствует матрица в
данном базисе и наоборот.
.
Таким образом, каждому линейному
оператору соответствует матрица в
данном базисе и наоборот.
Зависимость между матрицами одного и того же оператора в разных базисах выражается теоремой .
Теорема1. матрицы P
и P' линейного
оператора
![]() ,в
старом базисе (
,в
старом базисе (![]() 1,
1,
![]() 2,..
2,..![]() n)
и новом
n)
и новом
![]() связаны
соотношениями:
связаны
соотношениями:
![]() ,
где Т – матрица перехода от старого
базиса к новому.
,
где Т – матрица перехода от старого
базиса к новому.
Теорема2. Определитель матрицы линейного оператора не зависит от выбора базиса.