

§ 17. Исполнительные механизмы
Дисковые ножи закрепляют на ножевом валу. Ножевые валы получают движение от двигателя с помощью зубчатой, ременной или цепной передач. Нередко дисковые ножи закрепляют непосредственно на валу электродвигателя.
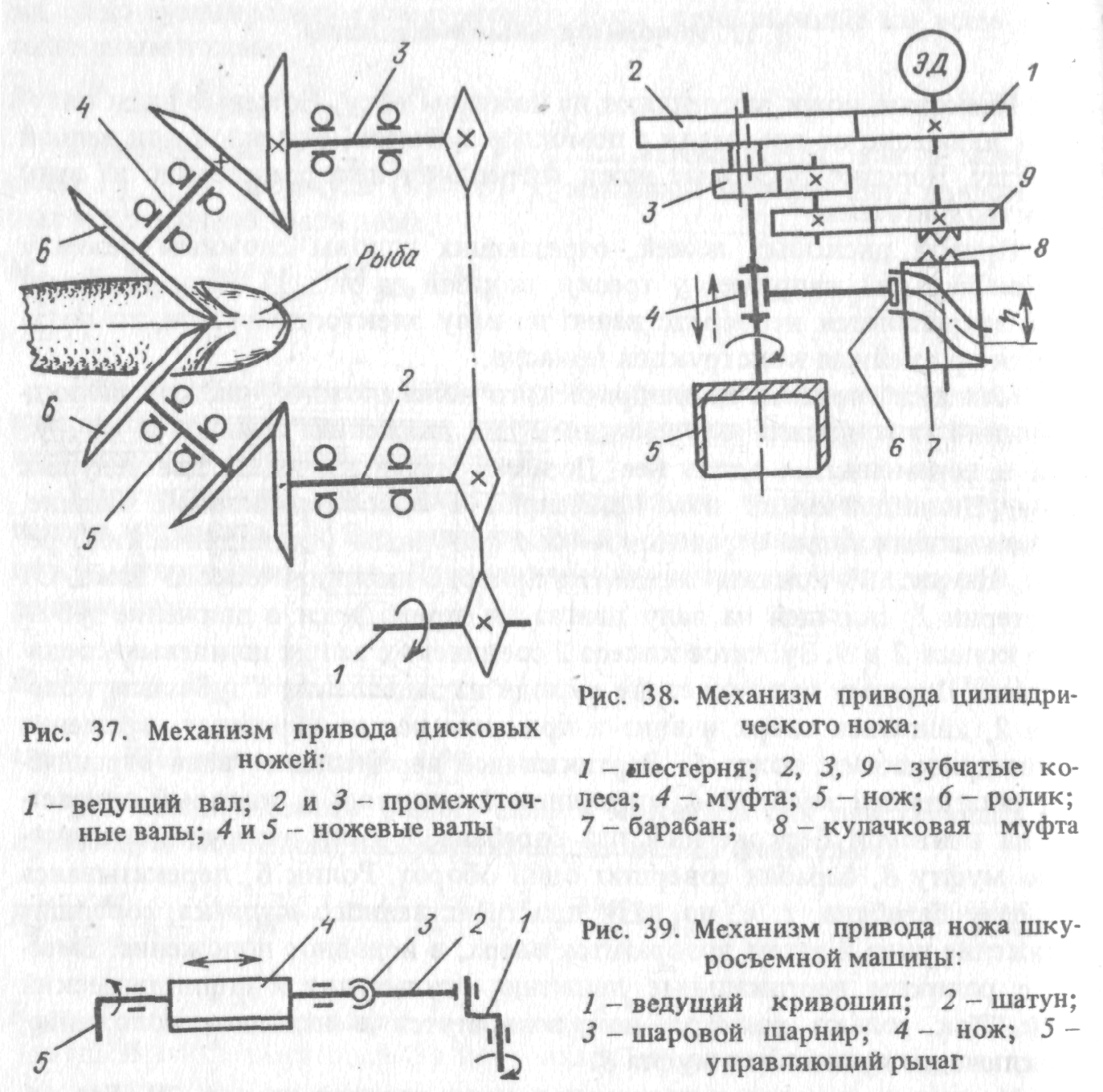
Привод дисковых ножей, отрезающих головы сложным резом у крупной рыбы, например у трески, показан на рис. 37. Если дисковый нож закрепляется непосредственно на валу электродвигателя, то получается простейшая конструкция привода.
Механизм привода цилиндрического ножа сложнее, так как цилиндрический нож должен осуществлять два движения: вращаться вокруг оси и перемещаться вдоль нее. Поэтому механизм имеет два ведущих вала. Цилиндрический нож применяют в однооперационной машине, предназначенной для отрезания головы фигурным (цилиндрическим) резом. На рис. 38 показан механизм привода цилиндрического ножа. От шестерни 7, сидящей на валу двигателя, приводятся в движение зубчатые колеса 2 и 9. Зубчатое колесо 2 соединено с валом шлицевым соединением. Поэтому вал может, не выходя из зацепления с зубчатым колесом 2, двигаться вверх и вниз и при этом всегда передавать вращение цилиндрическому ножу 5. Вертикальные перемещения вала ограничены скользящей муфтой 4, управляемой роликом 6, который опирается на винтовой бесконечный паз барабана 7. Если включить кулачковую муфту 8, барабан совершит один оборот. Ролик 6, перекатываясь по пазу барабана, т. е. по пазу пространственного кулачка, совершит движение вниз и затем возвратится вверх, в исходное положение. Вместе с роликом вертикальные движения осуществит и цилиндрический нож. Как только ролик и нож возвратятся в исходное положение, выключится кулачковая муфта 8.
Механизм привода гильотинного ножа показан на рис, 39. Его используют в шкуросъемной машине. От ведущего кривошипа 1 через шатун 2 приходит в движение нож 4, совершающий колебательные движения. В машине нож 4 автоматически прижимается к внутренней поверхности снимаемой шкуры. Прижатие производится при вращении ножа вокруг оси. Чтобы допустить такое вращение, соединение ножа (он ползун в механизме) с шатуном осуществлено шаровым шарниром - шаровой кинематической парой. Поворот ножа производится управляющим рычагом 5 с двумя ведущими звеньями 1 и 5 (в последних двух примерах ножи имеют две степени свободы).
Механизмы удаления внутренностей, приводящие в движение щетки-скребки, незначительно отличаются от механизма дисковых ножей. Однако часто для полного или частичного удаления внутренностей используют струю жидкости и вакуумные механизмы. Для своевременной и точной подачи струи жидкости в брюшную полость рыбы применяют механизмы гидровымыва, для вакуумного удаления внутренностей-вакуумные механизмы.
Механизм гидровымыва внутренностей (рис. 40) состоит из двух жестко связанных частей: левой и правой. На левой части находится звездочка 1, которая приводит в движение операционный конвейер (лоток конвейера показан тонкими линиями), Правая часть содержит основные узлы гидравлического устройства — гидроголовки: вращающийся корпус 8 с закрепленными на нем Г-образными трубами, в концы которых ввернуты сопла 9, В корпусе 8 размещается неподвижный распределитель 10, жестко соединенный с подводящей трубой 7, которая фиксируется зажимом 6.
В распределителе 10 имеются продолговатые отверстия. При вращении гидроголовки от звездочки 5 отверстия в корпусе поочередно совпадают с продолговатыми отверстиями распределителя, и вода по образовавшемуся проходу устремляется в сопло. Струя воды из сопла врывается в брюшную полость и вымывает внутренности. Струя воды давит на тушку и может сбросить ее влево с конвейера. Чтобы этого не случи-лость, рыба во время вымыва удерживается прижимом 2, управляемым пазовым кулачком. Пазовый кулачок одновременно является корпусом правого подшипника и жестко крепится к корпусу машины.
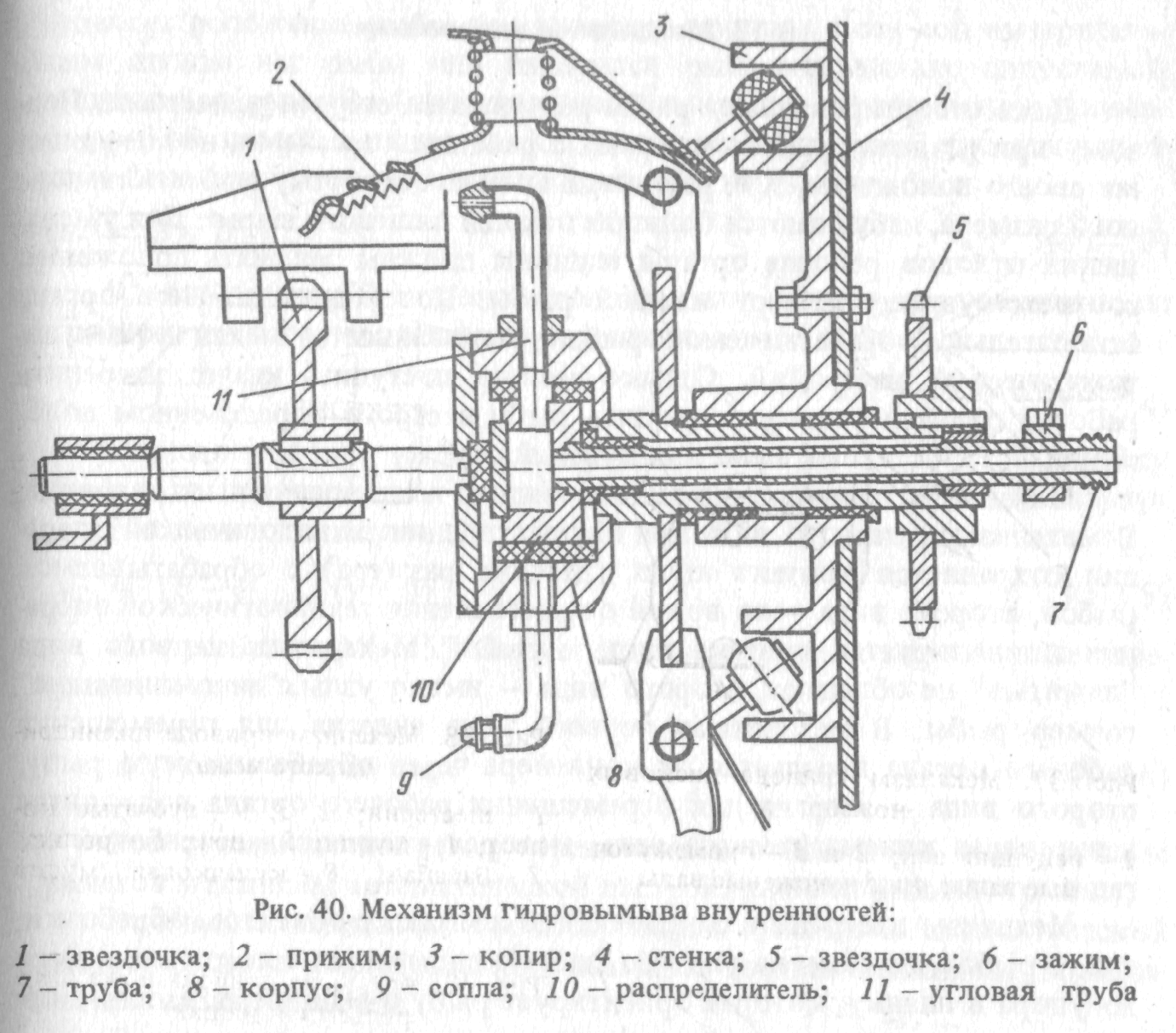
Так как размер обрабатываемых рыб разный, то прижим 2 подвижный, с помощью пружины прижимаемый к рыбе и удерживающий ее на месте.
Вакуумный механизм удаления внутренностей конструктивно напоминает механизм гидровымыва. Сопло, соединенное с помощью золотника с вакуумной системой, входит в брюшную полость рыбы, и происходит засасывание ее внутренностей. Между рыборазделочной машиной и вакуум-насосом находится сосуд-отделитель, в который из потока разреженного воздуха отделяются внутренности, которые накапливаются на дне сосуда и периодически удаляются.