

6. Контрольные точки
Номинальные скорости передачи - 139,264 или 155,520 Мбит/с.
Сопротивление - 75 Ом (коаксиальное).
Ослабление (затухание) - 20 дБ.
7. Электропитание
Номинальное напряжение батареи (минус 48 ± 25%) В.
Заземление - двухпроводная система с общим «+» и землей.
Резервирование - двойные фидеры.
Преобразование постоянного тока - распределенное, имеется в каждом блоке.
Мощность, потребляемая блоками:
TAU 4 x 140 -22,5
TAU 4 x STM-1e - 26 Вт;
TXU STM-16 - 36 Вт;
RXU STM-16 – 36 Вт;
IRU STM-16 - 32 Вт;
Мощность, потребляемая мультиплексорами:
TМ-2500 (незащищенный) - 163 Вт;
TМ-2500 (защищенный «1+1») - 211 Вт;
ADM-2500 - 211Вт;
Мощность, потребляемая линейным регенератором типа IRU STM-16 - 73 Вт.
7.2. Основные возможности системы передачи
7.2.1. Формирование структуры сигнала STM-16
Как известно (см. рис. 2.7), цикл передачи сигнала STM-1 может использоваться для транспортирования плезиохронных сигналов, имеющих различные скорости передачи, например, 140, 45, 2 Мбит/с. Для указанного примера в структуре цикла передачи сигнала STM-1 могут транспортироваться либо один сигнал со скоростью передачи 140 Мбит/с, либо три сигнала 45 Мбит/с, либо шестьдесят три сигнала 2 Мбит/с. Так как в системе передачи типа AXD-2500 из плезиохронных сигналов используется (обрабатывается) только сигнал 140 Мбит/с, то другие сигналы ниже не рассматриваются.
Весь цикл передачи сигнала STM-1 (см. рис. 2.17) состоит из полезного сигнала, т. е. сигнала 140 Мбит/с, заголовков РОН и SOH и указателя. Чтобы поместить полезный сигнал 140 Мбит/с в отведенное ему место в структуре цикла передачи модуля 5ТМ-1, необходимо выполнить определенные предварительные преобразования, а именно ввести биты согласования скорости передачи в общий поток битов. Сигнал со скоростью передачи 140 Мбит/с выравнивается, т. е. преобразуется по структуре так, чтобы он синхронизировался с той скоростью передачи, которая предназначена для его транспортировки. С этой целью передаваемый сигнал 140 Мбит/с размещается в контейнере С-4. Преобразование сигнала 140 Мбит/с в контейнер С-4 показано на рис. 2.18. При добавлении к сигналу С-4 заголовка РОИ образуется виртуальный контейнер VC-4, а добавление к последнему указателя превращает его в сигнал AU-4.
Для сигнала виртуального контейнера VC-4, скорость передачи которого равна 150,336 Мбит/с, допускается «плавание» в пределах цикла передачи модуля S7M-1, позволяя, таким образом, асинхронное функционирование в сети. Это может происходить в случае потери эталонного источника тактовой синхронизации или при расхождениях в тактовой синхронизации между взаимодействующими сетями. По этой причине для указания начала цикла передачи сигнала VC-4 и используется указатель, который содержится в байтах H1 и H2. Указатель сигнала AU-4 представляется значением в пределах от 0 до 728 с шагом в три байта. После этого значения указателя три следующие байта Н3 (см. рис. 2.10) используются для размещения либо действительных, либо ложных сигналов. Появляется возможность сдвигать информационные сигналы в эти запасные интервалы, если скорость передачи сигнала VC-4 больше чем сигнала STM-1 (отрицательное согласование скоростей). Если же скорость передачи сигнала VC-4 меньше чем сигнала STM-1, то байты HЗ заполняются балластом (положительное согласование скоростей).
В абсолютно синхронизированной сети SDH, где тактовая синхронизация выполняется от одного первичного эталонного генератора, указатель не должен использоваться. Количество согласований, происходящих за определенный промежуток времени, может служить параметром качества тактовой синхронизации в сети SDH.

Рис. 7.7
При работе с несколькими сигналами более низшего порядка, например, такими как три VC-3 (виртуальные контейнеры для плезиохронных сигналов со скоростями передачи 34 или 45 Мбит/с), их мультиплексирование образует сигнал, который называется групповым административным блоком AUG (см. рис. 2.6).
Для формирования транспортных сигналов STM-N более высокого уровня (N = 4, 16, 64, 256) N сигналов AUG могут быть сгруппированы вместе. Следует заметить, что сигналы STM-N формируются не просто мультиплексированием N сигналов уровня STM-1. Рекомендация ITU-T G. 709 определяет, что сформированные сигналы STM-N должны иметь N чередующихся байтов. На рис. 7.7 показано, что необходимая структура сформированного сигнала STM-16 достигается независимо от того, получен ли он путем каскадного мультиплексирования (через предварительное формирование сигналов STM-4) или путем непосредственного мультиплексирования 16 сигналов STM-1 в модуль STM-16.
7.2.2. Кроссовые соединения
Функциональная возможность кроссовых соединений в системе передачи AXD-2500 реализуется в линейных (агрегатных) блоках типа TXU STM-16 и RXU STM-16 как распределенная коммутационная сеть. Каждый из указанных блоков имеет свой собственный крос-коннектор, или матричный коммутатор кроссового соединения, который управляется встроенной системой управления, т. е. процессором блока.
Кросс-соединения в блоке передатчика показаны на рис. 7.8, а. Сорок восемь передаваемых сигналов STM-1p поступают на интерфейсы STM-1p, которые образуют 16 трехинтерфейсных групп. Из каждой группы выбирается один из трех сигналов. В результате 16 сигналов в последовательной форме записываются в буфер кросс-коннектора 16:16, где они временно хранятся перед их кроссировкой. Кросс-коннектор 16:16 не имеет ограничений и любой из 16 сигналов входных интерфейсов STM-1p может быть скроссирован на любой из выходов. Порядок следования выходных сигналов определяется командой управления, которая указывает, какой из сигналов STM-1p передавать на данный выход. В результате образуются «перетасованные» сигналы STM-1, которые некоторым способом распределены в сигнал STM-16. Для примера на рис. 7.8, б показан выходной сигнал, который состоит из четырех групп сигналов STM-1.

Рис. 7.8
В блоке приемника принятый сигнал STM-16 демультиплексируется в 16 сигналов. Кроссоединение реализуется в два шага: на первом шаге полученные сигналы произвольно размещаются внутри цикла передачи сигнала STM-16 в буфере кросс-коннектора, а на втором шаге любой из 16 сигналов подается на один из трех возможных портов STM-1p, как показано на рис.7.8, б. Все кроссовые соединения являются двунаправленными.
7.2.3. Тактовая синхронизация
Тактовая синхронизация в системах передачи и сетях SDH подразделяется на сетевую и системную.
Сетевая тактовая синхронизация означает, что для синхронизации системы передачи в сети выбирается и используется один из источников тактовой синхронизации (см. рис. 7.23).
Системная тактовая синхронизация представляет собой «внутреннее распределение» тактовых сигналов для синхронизации различных элементов системы передачи. При этом различают шлейфововую и сквозную синхронизации.
Шлейфовая синхронизация. В мультиплексорах типа ТМ-2500 и ADM-2500 для синхронизации всех передаваемых сигналов STM-16 используется один опорный источник синхронизации оборудования (SETS). Каждый из указанных мультиплексоров имеет, по крайней мере, по одному источнику SETS, как определено в Рекомендации ITU-T G.783 и показано на рис. 7.9.
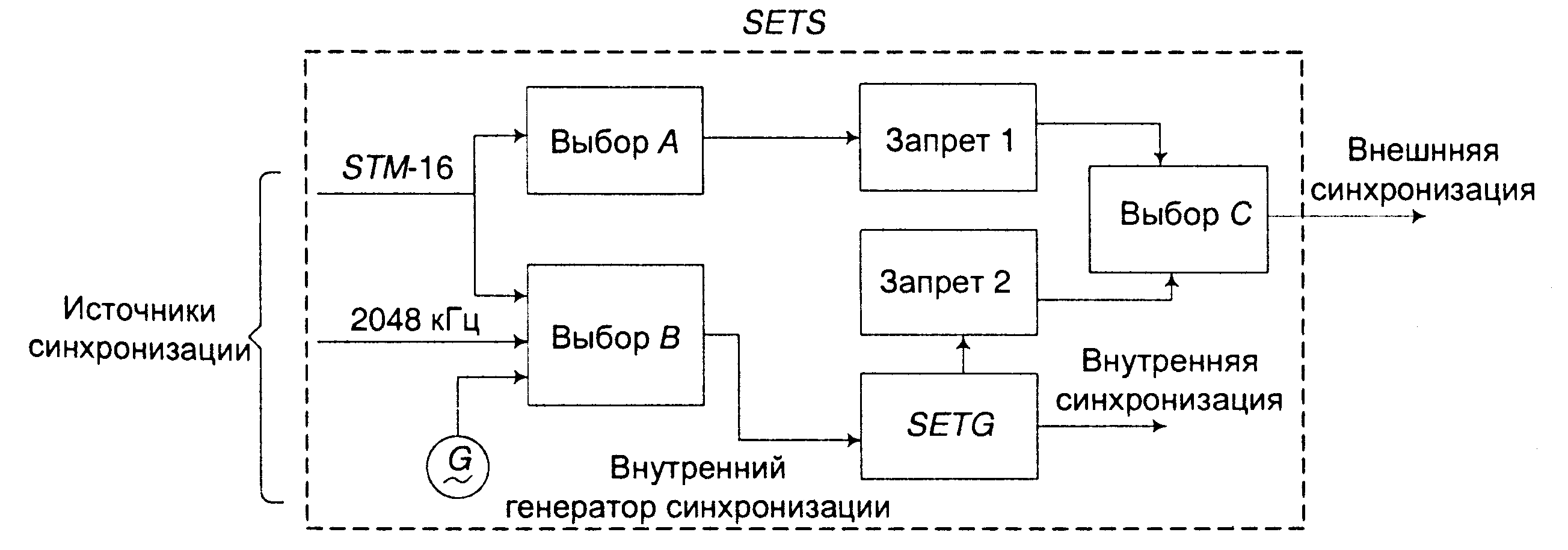
Рис. 7.9
Для обеспечения возможности синхронизации мультиплексоров в сети в качестве опорного источника тактовой синхронизации по отношению к синхронному генератору синхронизации оборудования (SETG) выбирается один из следующих:
внешний сигнал частотой 2,048 МГц, соответствующий требованиям Рекомендации ITU-T G.703, который подключается к субстойке и подводится к блокам мультиплексоров;
входной линейный сигнал STM-16, полученный после обработки в блоке RXU STM‑16, и входные сигналы пользователя STM-1e, поступившие в любой из блоков TAU 4 х х STM-1e;
собственный внутренний генератор синхронизации.
Для мультиплексоров типа TM-2500 и АDM-2500 существует два способа выбора источника для шлейфовой синхронизации: автоматический с критерием выбора по уровню приоритета и ручной, который может быть обычным или принудительным. Общим для всех этих способов при отсутствии внешнего источника синхронизации является выбор режима стабилизации в качестве последней альтернативы. Каждому источнику, кроме внутреннего генератора синхронизации, перед выбором (ручным или автоматическим) может быть назначен уровень приоритета, начиная с высшего. Если действующий источник синхронизации повреждается, мультикомплексор переключается на избыточный источник с наивысшим приоритетом. Если и этот источник выходит из строя, то выбирается следующий по приоритету избыточный источник. Все способы являются обратимыми, что позволяет вернуться к лучшему источнику синхронизации после его восстановления. Переключение источников синхронизации не приводит к битовым ошибкам в приеме сигналов.
Сквозная синхронизация реализована в регенераторах IRU STM-16, где каждый выходной сигнал STM-16 оптического передатчика синхронизируется сигналом, выделенным из входного сигнала STM-16 оптического приемника. Два направления распределения синхронизации независимы друг от друга. Если входной сигнал приемника поступает с ошибками (LOF - потеря фрейма, LOS - потеря сигнала), то выходной сигнал передатчика синхронизируется от внутреннего генератора синхроимпульсов, который имеется в каждом регенераторе. Внутренний генератор работает в режиме свободного управления, поддерживая тактовую частоту колебаний в пределах оговоренной точности. В регенераторах типа IRU STM-16 переход внутреннего генератора в указанный режим осуществляется мгновенно, минуя режим стабилизации.
Поскольку регенератор не имеет функциональных возможностей по управлению синхронизацией, то у него нет интерфейсов внешней синхронизации.
7.2.4. Способы защиты мультиплексной секции
В оборудовании SDH компании Ericsson имеется возможность обеспечить защиту мультиплексных секций. В системах передачи типа AXD-620 и AXD-2500 предусматривается защита линейной сети способом «1+1». Кольцевая топология сети, построенная с использованием DIM типа ADM-620, обладает способностью так называемого однонаправленного самовосстанавливающегося кольца (см. подразд. 4.1.3). Это позволяет трафику проходить по основному (рабочему) тракту кольца, которое имеет также резервный (защитный) тракт. В случае неисправности (аварии) участка кольца, оно «изолирует» неисправный участок направляя трафик частично по резервному (защитному) тракту, как показано на рис. 7.10.

Рис. 7.10
Защита линейной сети способом «1+1», или MSP «1+1» требует дублирования линейных блоков, как показано на рис. 7.4. Схема дублированного трафика приведена на рис. 7.11, из которой видно, что линейные блоки передают трафик по обоим трактам: основному и резервному. На обоих концах СЛТ два одинаковых принимаемых сигнала STM‑16, так же, как и два блока RXU-16, по отдельности контролируются и для дальнейшей обработки используется принятый сигнал лучшего качества. При защите линейного тракта способом «1+1» возможны два варианта реализации: переключение оборудования может происходить на обоих концах защищаемой мультиплексной секции или на одном ее конце. В обоих вариантах защитное переключение может выполняться автоматически или принудительно.
Ниже для примера рассматривается сценарий варианта автоматического защитного переключения оборудования на обоих концах СЛТ. Для передачи информации защитного протокола мультиплексорам узлов А и С используются байты К1 и К2 заголовка MSOH. В данном сценарии описываются изменения значений передаваемых байтов K1, K2 и операции, происходящие на узлах А и С. Исходным моментом является повреждение (авария) оптического волокна в основном (рабочем) тракте 1, по которому передавались оптические сигналы в направлении от узла А к узлу С.

Рис. 7.11
1. Функционирование в рабочем режиме:

2. Отсутствие прохождения сигналов в основном тракте 1 от узла А к узлу С:

3. Узел А переключается с основного тракта 1 на резервный тракт 2. Выработан обратный запрос от узла А к узлу С:

4. Узел С переключается с основного тракта 1 на резервный тракт 2:

5. Защитные переключения на обоих узлах выполнены. Авария в тракте 1 остается:

6. Нарушение прохождения сигналов в основном тракте 1 устранено. Начинается отсчет времени ожидания восстановления:

7. Время ожидания восстановления истекло. Переопределение основного и резервного трактов на узле С:

8. Время ожидания восстановления истекло. Переопределение основного и резервного трактов завершено:

Остальные варианты автоматического или принудительного защитного переключения оборудования на резервный тракт реализуются по аналогичному алгоритму.
7.2.5. Автоматическое выключение лазера
Блок оптического передатчика мультиплексора типа SMUX-2500 имеет систему автоматического выключения (гашения) лазера ALS (Automatic Laser Shutdown). Система ALS гасит излучение лазера при появлении аварийного сигнала LOS, т. е. потеря оптического ЦЛС уровня STM-16 на входе ОПМ типа RXU STM-16 (далее «Потеря сигнала STM-16»).
Это позволяет практически исключить передачу оптического излучения по разорваному волокну или неподключенному оптическому коннектору (разъему). Если индикация LOS сбрасывается, то лазер начинает излучать немедленно. Работа системы ALS поясняется с помощью рис. 7.12.

Рис. 7.12
Если происходит разрыв волокна оптической секции в некоторой точке х СЛТ, то в пункте доступа А срабатывает сигнализация «Потеря сигнала STМ-16», вызывающая гашение лазера в оптическом передатчике этого пункта через определенное время после разрыва волокна. Это время составляет чуть больше 0,5 с. После выключения лазера в пункте доступа А через такое же время в пункте доступа В также срабатывает сигнализация «Потеря сигнала STM-16», что вызывает гашение лазера в оптическом передатчике пункта доступа В.
Таким образом, после разрыва волокна оптическая мощность в точке л: СЛТ снимается приблизительно через 1 с.
Далее происходит следующее. Пока разрыв волокна не устранен, оптический передатчик в пункте доступа А через каждую минуту пытается запустить лазер следующим образом:
- в пункте доступа А лазер оптического передатчика включается на 2 с, в результате чего оптический сигнал поступает на вход оптического приемника пункта доступа В;
в пункте доступа В сбрасывается сигнализация «Потеря сигнала STM-16», сигнал гашения лазера пропадает и лазер включается на 2 с;
- из-за разрыва волокна в точке «x» СЛТ этот сигнал не достигает оптического приемника пункта доступа А, в этом пункте срабатывает сигнализация «Потеря сигнала STM-16» и вырабатывается сигнал гашения лазера - лазер в пункте доступа А выключается.
Рассмотренная последовательность операций выполняется через каждые 64 с до устранения разрыва волокна.
После восстановления разорванного волокна или его замены исправным оптический сигнал передатчика пункта доступа В достигает приемника пункта доступа А, где сбрасывается сигнализация «Потеря сигнала STM-16» и сигнал гашения лазера не вырабатывается. Лазер оптического передатчика пункта доступа А запускается и система передачи начинает функционировать в рабочем режиме.
В новейших оптических передатчиках тестовые задачи игнорируют механизм гашения лазера. При тестировании лазер разблокируется на 90 с, чтобы можно было измерить оптическую мощность на его выходе. Через 90 с лазер выключается и находится в погашенном состоянии, пока блок оптического передатчика вынут из субстойки. Тестирование лазера не проводится, если имеет место аварийный сигнал Too High Opt. Power, т. е. слишком высокая оптическая мощность или другие аварийные сигналы (Too Low Opt. Power - слишком низкая оптическая мощность, Too Low Laser Bias - слишком малый ток смещения лазера, Too High Laser Bias - слишком большой ток смещения лазера, Trans. Opt. Pwr OOR - выход передаваемой оптической мощности за пределы, Laser Temp. OOR -выход за пределы температуры лазера), которые являются индикацией или предупреждением о неисправности оптического модуля передатчика.
7.2.6. Программное обеспечение
В системе передачи типа AXD-2500 каждый физический параметр, например заголовок MSOH, представляется в качестве управляемого объекта, который имеет программное представление, следовательно, управляется программными средствами. Все управляемые объекты в форме программного представления записаны и хранятся в базе данных, которая физически размещается в блоке управления SU. Назначение блока SU указано в подразд. 7.1.2. Все операции по контролю, конфигурированию и управлению блоками, элементами и системой передачи в целом блок SU выполняет через процессоры UP, которые имеются во всех блоках системы передачи типа AXD-2500 (кроме блока SU). Взаимодействие между блоком SU и процессорами UP осуществляется программно через интерфейсы SU-UP. В качестве программного обеспечения в системе передачи AXD-2500 используется операционная система Windows NT. Уровневые структуры, или уровни программного обеспечения (ПО) блоков управления и процессора показаны на рис. 7.13.

Рис. 7.13
Уровень доступа пользователя имеет следующие составные части:
сервер PC для связи с ЕМ (локальным администратором);
набор протокола модели OSI для интерфейсов Q3 и ЕСС;
менеджер протокола для управления набором протокола модели OSI.
Сервер PC обеспечивает протокол передачи сообщений (данных) для ЕМ. Он посылает заказы с PC элемент-менеджера на уровень сети TMN через стек протокола модели OSI и получает ответы, направленные к ЕМ из набора протокола. Набор протокола модели OSI заботится о протоколах передачи сообщений для интерфейсов Q3 и ЕСС. Он также посылает сообщение к серверу PC и из сервера PC.
Уровень сети TMN определяет общие атрибуты мультиплексоров SMUX-2500 и следит за тем, чтобы для пакета атрибутов в различных «классах объектов» все атрибуты и свойства были обработаны как «объекты» внутри операционной системы OS. Уровень TMN также содержит базу (банк) данных MIB.
Уровень SMUX определяет все элементы системы передачи AXD-2500, т. е. системы передачи SDH, поскольку они определены в Рекомендации ITU-T G.783.
Уровень магазина. Термин «магазин» означает полное объединение элементов (блоков), управляемое одним устройством (блоком SU). Этот уровень представляет физическое объединение различных блоков системы передачи AXD-2500 и объединительных плат. Основная задача уровня магазина состоит в том, чтобы трансформировать конфигурацию элементов сети, определенную на уровне SMUX-2500 в отдельные конфигурации для каждого блока, транспортирующего трафик.
Уровень блока (модуля). Взаимодействие между уровнем блока SU и уровнем блоков UP состоит из ряда параметрических пакетов, передаваемых в обоих направлениях. Параметрические пакеты включены в циклы передачи (фреймы) сообщений. Они передаются на локальную шину, которая обрабатывает передачу параметрических пакетов между блоком SU и процессорами UP. Эти сообщения формируют основное взаимодействие между блоком управления SU и процессорами UP.
Базовый уровень. Функция базового уровня вводит независимый уровень над аппаратурными средствами и фактической операционной системой OS. Базовый уровень скрывает функции ниже этого уровня и обеспечивает интерфейс между более низкими уровнями и прикладным программным обеспечением системы передачи AXD-2500.
Уровень блока (модуля) и более высокие уровни никогда «не видят» аппаратурные адреса, прерывания, вызовы системы OS и т. д.
Базовый уровень разделен на семь отдельных объектов: процессы, сигнал, драйвер неисправности, порт блока (модуля), порт аварий, таймер, общее.
Уровень VM (виртуальной машины) обеспечивает интерфейс между аппаратными средствами и другими уровнями в программном обеспечении SU. К главным задачам, которые выполняются уровнем VM, относятся:
инициирование аппаратных средств (МС 68302, контроллер Ethernet и LATCH);
обработка физического уровня последовательной связи;
просмотр внешних аварий и защелки;
запись для светодиодов;
обработка сторожевой цепи HW (микропроцессор МС 68302 содержит сторожевую цепь HW, которая контролирует рабочую программу; эта сторожевая цепь должна модифицироваться программным обеспечением SW по крайней мере с фиксированной частотой; если сторожевая цепь не модифицируется, она вызывает сброс процессора UP);
резервное хранение параметров конфигурации;
обработка ошибок программного обеспечения (уровень VM должен обрабатывать обнаружение неисправности программного обеспечения, помечать дефект и сохранять описание неисправности);
- восстановление идентификации изделия и адреса Ethernet.
Кроме программного обеспечения блоков SU и UP, в системе передачи типа AXD-2500 применяется несколько прикладных программ, использование которых рассматривается в качестве начального шага для выполнения операций по контролю и управлению.
Для доступа оператора к элементам системы передачи AXD-2500 используется персональный компьютер, который в данном комплексе называется терминалом локального оператора LOT, а ЕМ называется локальным менеджером, или локальным администратором [110]. Пакет прикладных программ локального менеджера, который может быть установлен на его PC, т. е. на LOT, включает:
программное обеспечение Q-связи;
прикладную программу локального менеджера;
прикладную программу модернизации и конфигурации мультиплексора SMUX-2500.
Физическое соединение LOT и местного элемента системы передачи AXD-2500, или элемента сети выполняется с помощью кабеля Q-интерфейса, подключаемого к порту Ethernet LOT и к внутренней соединительной панели субблока, который образует данный NE.
Q-связь адаптирует данные локального менеджера к Q3-интерфейсу. Плата связи Ethernet, установленная в LOT, служит как физический интерфейс.
Программное обеспечение Q-связи - это инструмент, управляющий связью между LOT и местным NE через сеть Q-интерфейс - Ethernet. Данное ПО включает ряд отдельных файлов, которые должны быть записаны в различных положениях файловой системы. Программное обеспечение Q-связи - это сетевое приложение связи; оно должно быть установлено в LOT перед любыми другими приложениями мультиплексора SMUX-2500. Когда LOT стартует, ПО Q-связи автоматически активизируется, оно должно всегда запускаться при работе других приложений. Установка Q-связи на LOT выполняется сценарием, который запускается автоматически.
Прикладная программа локального менеджера - это приложение, используемое для контроля за функционированием элементов системы передачи AXD-2500 на сети и для управления этим функционированием. Представление о возможностях этого приложения можно сделать по краткому перечню особенностей и функций прикладной программы локального менеджера.
Например, WINDOWS-приложение «Основное окно после входа в систему» имеет пять рабочих областей: «Текущий сеанс», «Сообщения системы», «События», «Путь мультиплексирования», «Выбор объекта» и еще пять пунктов меню: View (Просмотр), Configuration (Конфигурация), Fault (Неисправность), Performance (Характеристики) и Network (Сеть).
Прикладная программа модернизации и конфигурации. Все данные о конфигурации любого элемента системы передачи AXD-2500 записаны в базу данных, или управляемую информационную базу MIB, которая хранится в оперативной памяти блока SU. Прикладная программа модернизации и конфигурации - это средство обмена данными между внешним диском LOT и базой MIB, которое применяется при загрузке и выгрузке данных о конфигурации мультиплексора SMUX-2500. Для этого используется текстовый файл TF (Text File). Этот файл может храниться на жестком диске LOT или дискете. Обычно данные вводятся в файл TF при работе прикладной программы, хотя файл TF можно редактировать вручную с помощью текстового редактора.
WINDOWS-приложение главного окна имеет три рабочих области: «Текущий сеанс», «Сообщения системы», «Область протокола» и три пункта меню: Session, File и Help.
Прикладная программа модернизации и конфигурации применяется в следующих случаях:
при расширении программных средств блока SU;
при создании нового элемента мультиплексора SMUX-2500 с такой же конфигурацией, что и уже существующий;
при необходимости документировать конфигурацию всех NE;
при необходимости резервного копирования на диск.
Один LOT может управлять всеми элементами системы передачи AXD-2500 данной сети SDH, причем в любой момент времени только одним. Однако при первичной установке (инсталляции) элемента он должен быть локально соединен с LOT с целью конфигурации элемента для его подготовки к работе в сети.
На LOT или на любом другом PC сети может быть инсталлирован сетевой менеджер NM, называемый в мультиплексоре SMUX-2500 администратором ресурсов. Персональный компьютер, который используется оператором сети для управления работой нескольких элементов данной сети, называется терминалом администратора ресурсов.
Прикладная программа аварийной сигнализации. Пакет прикладных программ NM, кроме указанных выше трех прикладных программ локального менеджера, имеет прикладную программу аварийной сигнализации. Ее основной особенностью является возможность одновременной аварийной сигнализации до 30 элементов системы передачи AXD-2500 на сети SDH.
Кроме указанных выше прикладных программ, блок процессора UP каждого элемента мультиплексора SMUX-2500 имеет свое программное обеспечение. Микропрограмма каждого блока UP состоит из двух частей:
программы, записанной в постоянной перепрограммируемой памяти, где находятся также такие постоянные данные, как номер версии программного обеспечения и дата последнего изменения программы;
программы, записанной в энергозависимую память или память с произвольным доступом ОЗУ, где хранятся также рабочие параметры: сертификат изделия, тип оборудования, оптические параметры и др.
Блок процессора UP состоит из трех основных функциональных устройств: ядра компьютера, устройств последовательного ввода-вывода и устройств параллельного ввода-вывода. Ядро компьютера образуют: микропроцессор, память, проверочная цепь, контроллер прерываний, декодер адреса и таймер.
Проверочная цепь осуществляет контроль программного обеспечения и при сбое программы выполняет повторный запуск процессора UP. Процессор хранит текущую дату и время. Они необходимы для работы программного обеспечения.
7.2.7. Контроль ошибок, неисправностей и параметров
Для поддержания системы передачи в работоспособном состоянии в ней имеется возможность проведения постоянного и всеобъемлющего контроля ошибок, неисправностей и параметров на различных уровнях разными методами и способами. Ниже кратко рассмотрены некоторые из них.
1. Контроль ошибок возможен на трех транспортных уровнях: в регенерационной секции, мультиплексной секции и тракте VC-4, в котором обеспечивается также контроль приема ошибок на дальнем конце с использованием состояния байта G1 заголовка VC-4 РОH и байтов контроля.
В качестве способа контроля ошибок применяется код четности X-чередуемых битов (BIP-X). X-битовый код вырабатывается передающим оборудованием для определенного блока битов сигнала таким образом, что первый бит кода обеспечивает четность первых битов всей X-битовой последовательности выделенного сигнала, второй бит обеспечивает четность для вторых битов этой же последовательности и т. д. Четность достигается установкой битов BIP-X так, что образуется четное количество единиц в каждом контролируемом участке (сегменте) сигнала. Контролируемый сегмент содержит все биты, которые занимают одинаковую позицию внутри X-битовой последовательности в выделенном блоке сигнала. Выделенный блок включает в себя также и биты BIP-X.
Пример с вычисленным кодом BIP-8 для группы из 48 бит, образующих 6 байт, показан на рис. 7.14. В нижнем ряду показано результирующее значение BIP-8. Первая колонка имеет три единичных бита и поэтому требует добавления еще одной «1» в байт BIP-8 для удовлетворения условия четности. Последующие колонки обрабатываются таким же способом, образуя результирующий байт BIP-8 со значением 11010011.
Для контроля ошибок регенерационной секции используется байт В1 заголовка RSOH. Код BIP-8 вычисляется для всех битов предыдущего цикла передачи сигнала STM-16 после его скремблирования (шифрования) и вставляется в байт 51 перед скремблированием (см. рис. 3.41).

Рис. 7.14
Для контроля ошибок мультиплексной секции используется байт В2 заголовка MSOH. При этом в цикле передачи сигнала STM-1 используется три байта В2, т. е. для контроля ошибок мультиплексной секции в системе передачи SDH первого уровня вычисляется код BIP-24 (BIP-8 х З), в цикле передачи сигнала STM-4 используется 12 байт - вычисляется код BIP-96 (BIP-8 х 12) и в цикле передачи сигнала STM-16 используется 48 байт -вычисляется код BIP-384 (BIP-8 х 48). Код BIP-384 вычисляется для всех битов предыдущего цикла передачи сигнала STM-16, кроме первых трех рядов заголовка MSOH, и вставляется в байты В2 перед скремблированием.
Для контроля ошибок тракта VC-4 используется байт В3 заголовка VC-4 РОH. Процесс контроля аналогичен контролю ошибок регенерационной секции.
2. Функциональные возможности контроля неисправностей. Они включают три составляющие:
наблюдение за аварийными сигналами, при котором неисправности обнаруживаются и выдаются оператору в виде сообщений;
локализация неисправностей, при которой выделяется определенная часть сети или системы передачи SDH;
тестирование, при котором анализируются параметры оборудования и цепей из состава системы передачи.
Наблюдение за аварийными сигналами обеспечивает способность обнаруживать возникающие в сети или в системе передачи неисправности почти в реальном масштабе времени. Количество принятых аварийных сигналов постоянно показывается в главном окне PC локального менеджера. Протокол аварийных сигналов представляет собой запись всех аварийных сигналов, вырабатываемых (выдаваемых) системами передачи на сети. Оператор может получить доступ к протоколу аварийных сигналов, выбрав опцию Fault (Неисправность) из Logged Reports ... (Зарегистрированные сообщения) в главном окне. Дальнейшие подробности о каждом аварийном сигнале могут быть получены, если выбрать соответствующие сообщения в окне протокола аварийных сигналов и выполнить щелчок по кнопке Show details .... (Показать подробности).
На каждом блоке мультиплексора SMUX-2500 имеется зеленый светодиод, который горит при исправном блоке вторичного питания. Для индикации неисправного блока на каждом из них имеется красный светодиод, который загорается при появлении хотя бы одной неисправности, индицируемой красным светодиодом.
Есть неисправности, которые не сигнализируются красными светодиодами блоков или не могут быть устранены заменой одного (данного) блока. Такие неисправности индицирует красный светодиод мультиплексора SMUX-2500. Он горит при наличии хотя бы одного действующего аварийного сигнала, вызванного одной из следующих причин:
потеря сигнала;
слишком низкая оптическая мощность излучения лазера;
слишком высокая оптическая мощность излучения лазера;
несовпадение идентификатора С1;
AIS (сигнал индикации аварии) мультиплексной секции;
чрезмерное значение ВЕR (уровень битовых ошибок);
ухудшение сигнала;
потеря указателя AU-4 PTR;
недействительное содержание указателя AU-4 PTR;
потеря записи (Loss of Trace);
несовпадение записи тракта;
неисправность буфера;
потеря синхронизации;
отказ генератора сигналов;
отказ основного питания;
отказ вторичного питания;
отказ питания AUI;
отсутствие платы (блока) в позиции субстойки;
отказ защитного переключения;
несовпадение режима для MSP;
несовпадение архитектуры для MSP;
отказ сигнала внутреннего трафика;
отказ внутренней связи.
Мультиплексор SMUX-2500 имеет желтый светодиод, индицирующий включение напоминателя аварии, который находится на блоке SU. Напоминатель позволяет дежурному персоналу убедится в том, что все текущие неисправности мультиплексора находятся под наблюдением других коллег.
Локализация неисправностей. Среди различных способов локализации неисправности (таких как образование шлейфа, ввод ошибок, запись тракта и др.) самым распространенным и эффективным является образование шлейфа как на ближнем, так и на дальнем конце на различных транспортных уровнях.
Образование шлейфа в мультиплексоре SMUX-2500 рассмотрим на примере оконечного блока доступа типа TAU 4 х 140, где имеется возможность установки шлейфа для каждого отдельного тракта уровня Е4 (D4). Схема образования шлейфов показана на рис. 7.15, а. Для образования шлейфа тракта Е4 на ближнем конце вход тракта после преобразователя кода передачи CMI/BIN соединяется с выходом тракта до преобразователя кода приема BIN/CMI, т. е. шлейф выполняется для двоичного сигнала (рис. 7.15, б). Эта конфигурация может быть осуществлена с помощью непосредственных команд по управлению сетью. Шлейф на ближнем конце в основном используется для передачи проверочных сигналов при построении сети. Для образования шлейфа тракта Е4 на дальнем конце выход тракта до преобразователя кода приема BIN/CMI соединяется со входом тракта до преобразователя кода передачи CMI/BIN, т. е. шлейф также выполняется для сигналов в двоичной форме (рис. 7.15, б). Как для шлейфа на ближнем, так и на дальнем конце можно выбрать режимы контроля BER и AIS.
Для сигналов уровня STM-16 шлейф на ближнем и дальнем концах можно выполнить на мультиплексной секции в блоках TXU STM-16, RXU STM-16 (см. рис. 3.41 и 3.43) и на регенерационной секции в этих же блоках, а также в блоке IRU STM-16 (см. рис. 3.44).
Тестирование. Мультиплексор SMUX-2500 обеспечивает некоторые возможности проверки и контроля оборудования и цепей прохождения сигналов внутри системы передачи. К этим возможностям относятся проверка (измерение) параметров и контроль прохождения сигналов.
Первая возможность позволяет оператору с помощью локального менеджера считывать в оборудовании два параметра:
уровень принимаемой оптической мощности на входе оптического приемника, дБм;
ток смещения лазера оптического передатчика, мА.
Результаты обоих аналоговых измерений обрабатываются с использованием аналого-цифровых преобразователей.

Рис. 7.15
Вторая возможность обеспечивает контроль прохождения сигналов в блоках TAU 4 х x 140 и TAU 4 х STM-1e, которые для каждого из четырех трактов на передней панели имеют по две контрольные точки: одна для входного (передаваемого) сигнала, а вторая - для выходного (принимаемого) сигнала. Точки мониторинга безопасны, сигналы в них ослаблены на 20 дБ относительно номинального значения уровней сигналов.
3. Текущий контроль параметров (РМ) служит для непрерывного сбора (накопления) сведений (данных) о качестве функционирования системы передачи на сети, предоставления этих данных в 15-минутные и 24-часовые периоды наблюдения, сравнения накопленных данных с установленными значениями порогов и передачи оператору сети сообщений о любых пересечениях порогов. Процесс контроля РМ состоит в следующем.
Функция транспортировки обрабатывает входной сигнал в соответствии с правилами, определенными в Рекомендациях ITU-T G.782 и G.783. Обработка сигнала может быть выполнена как механизм состояния, например, в интегральной схеме специального назначения ASIC. Если входной сигнал дефектный, это делает невозможным его обработку установленным способом, что будет показано вместе с точной спецификацией типа дефекта. Индикация дефекта формирует одну из основ для генерации параметров РМ. Функция транспортировки собирает такие аномалии типа FAS-ошибок для сигналов E4, ошибки на ближнем конце (BIP-N ошибок) и ошибки на дальнем конце (FEBE) для сигналов систем передачи типа AXD-2500. Параметры РМ генерируются также для событий использования указателя для выравнивания скорости передачи сигнала VC-4 (см. подразд. 7.2.1) и выполнения защитных переключений в системах передачи с защитой «1+1» (см. подразд. 7.2.4). Все указанные аномалии и события формируют основу для таких параметров, как секунда с ошибками ES, секунда с серьезными ошибками SES или фоновая блочная ошибка ЕВЕ (см. подразд. 6.2.4).
Для примера в табл. 7.1 приведены значения параметра SES для различных функций передачи.
Таблица 7.1
|
Функции передачи |
Параметр |
Значения |
|
RST |
SES |
2400 |
|
MST(STM-1) |
SES |
2400 |
|
MST (STM-16) |
SES |
2400 |
|
VC-4TTP |
SES |
2400 |
|
Е4 СТР |
SES |
568 |
7.2.8. Управление конфигурацией
Область функционального применения управления конфигурацией включает:
конфигурацию на физическом уровне;
конфигурацию транспортных функций;
кроссовые соединения;
тактовую синхронизацию;
защитные переключения;
управление базой данных;
управление календарем.
Конфигурация на физическом уровне позволяет оператору выводить на индикацию и определять конкретные виды SMUX-2500. Области применения:
а) конфигурация оборудования - идентификация мультиплексора, субстойки, установленных блоков;
б) настройка блоков - характерная информация, касающаяся отдельных плат (ТЭЗ, блоков);
в) тип SMUX-2500 - определение конфигурации блоков в субстойке, например, IRU STM-16 или незащищенный TM-2500 с 16 портами STM-1e;
г) идентификатор управляемого элемента - нумерация идентификаторов с целью их использования для управления сетью.
Конфигурация оборудования подразделяется на три вида: конфигурация мультиплексора SMUX-2500, субстойки и блоков.
Раздел SMUX-2500 имеет два текстовых поля: User Label (Метка пользователя), ёмкость до 80 символов и Location (Расположение) - до 128 символов. Вместе с наименованием компании-изготовителя индицируется тип элемента системы передачи, например, TМ-2500 16 х STM-1e.
Раздел субстойки (окна конфигурации оборудования) имеет два таких же текстовых поля.
В разделе Units (Блоки) приводится перечень установленных в настоящий момент блоков. Как видно из примера (рис. 7.16), блок в позиции 7 извлечен и поэтому в колонке Card out (Извлеченные платы) индицируется активное состояние аварийного сигнала (Active). Информация о позиции блока поступает с закодированных соединительных контактов задней панели. Эти данные считываются процессором UP блока и передаются в блок управления SU.

Рис. 7.16
Настройка блоков управляет информацией, касающейся отдельных блоков. В пределах раздела Unit (Блок) оператор может наблюдать позицию выбранного блока, его тип, аппаратурный и программный коды. Имеется несколько различных окон настройки блоков: Version (Версия), State (Состояние), Card out (Извлеченные платы) - 48 Voltage Failure (Отказ питания - 48 В) и др.
В окне State (Состояние) имеется возможность наблюдения текущего состояния выбранного блока. Alarm State (Аварийное состояние) отражает аварийный сигнал блока с воспринимаемой важностью, в то время, как все остальные поля имеют два значения: Cleared (Отсутствие неисправности) или Active (Наличие неисправности).
Hardware Failure (Отказ аппаратуры) индицируется, например, при повторяющихся автоматических перезапусках или непонятном поведении прикладной программы и т. д.
Если статус управления блока блокирован, оператор не может изменить содержимое поля метки пользователя и при этом отключается индикация аварийного состояния. Однако светодиоды продолжают выдавать предупреждения при возникновении отказов оборудования.
Проверочное окно подавления аварийных сигналов позволяет подавить все аварийные сигналы подобно блокировке статуса управления, но при этом поле метки пользователя остается доступным для изменения. Такая возможность осуществима только для агрегатных (линейных) блоков, т. е. блоков TXU STM-16, RXU STM-16 и IRU STM-16.
Тип SMUX-2500. Данная функциональная возможность позволяет оператору выбрать один из пяти возможных вариантов конфигурации для TМ-2500 (см. рис. 7.3) и один для регенератора IR. Это окно показывает также и текущую конфигурацию.
Идентификатор элемента системы передачи типа AXD-2500 может принимать значения от 1 до 255. Он используется для различения элементов в сети.
Конфигурация транспортных функций позволяет наблюдать и управлять состоянием различных функциональных блоков в структуре сигналов STM-16, STM-1e или Е4 (D4). К транспортным функциям, представленным в системе передачи AXD-2500, относятся:
физический интерфейс SDH;
окончание мультиплексной секции;
завершение соединений АU-4;
завершение тракта VC-4;
завершение соединений Е4 (D4);
физический интерфейс PDH.
Для примера ниже рассматривается первая транспортная функция.
На физический интерфейс SDH поступает электрический или оптический сигнал, что соответствует Рекомендациям ITU-T G.703 (электрический) и G.957 (оптический).
Возможны два окна представления, связанные с физическим интерфейсом SDH: оптического сигнала STM-16 линейных блоков и электрического интерфейса блока TAU 4 х x STM-1e.
Параметры сигнала SDH в терминальных точках оптической секции (параметры SDH OS ТТР) позволят оператору наблюдать текущие аварийные сигналы, состояния передачи лазера и приема фотодиода.
Alarm State (Аварийное состояние) представляет любые текущие отказы в пределах физического оптического интерфейса. Данными отказами являются: потеря сигнала, низкая оптическая мощность, высокая оптическая мощность, малый ток смещения лазера, большой ток смещения лазера, выход за пределы мощности передачи и температура лазера.
Для заблаговременного предупреждения пользователя об ухудшении работы лазера могут устанавливаться различные пороговые значения.
Уровень принимаемой оптической мощности имеет пороговый диапазон минус 40...0 дБм. Можно также изменять пороговые значения для тока смещения лазера.
Индикации Power out of Range (Выход мощности за пределы) и Temperature out of Range (Выход температуры за пределы) появляются при отказе в цепях управления лазером.
В пределах окна параметров имеется возможность изменить статус управления. Если статус блокирован, оператор не может изменить (за исключением кнопок статуса управления) ни один параметр в этом окне, например, нижнее пороговое значение. Ни об одном из отказов, касающихся SDH OS TTP, при блокировке статуса управления не будет выдано сообщений в файле регистрации событий и неисправностей. Блокировка статуса управления не оказывает влияние на светодиоды оборудования.
Параметры электрического сигнала SDH в терминальных точках секции (параметры SDH ES ТТР) позволяют оператору наблюдать текущие аварийные сигналы и активные шлейфы. В остальном (аварийное состояние, возможность изменения статуса управления) возможности управления те же, что и для параметров SDH OS TTP.
Параметры сигнала в терминальных точках регенерационной секции (параметры RS ТТР) для сигналов STM-16 и STM-1 одинаковы по своему функционированию, но могут быть идентифицированы просмотром текстового поля управляемого объекта, где указываются атрибуты сигналов регенерационной секции (RS TTP Attributes).
Аварийное состояние отображает любые текущие отказы в пределах RS ТТР. Этими отказами могут быть либо потеря фрейма, либо несовпадение между принимаемыми и ожидаемыми байтами идентификатора С1.
На экран выводится состояние байта С1. Это позволяет оператору изменять значение передаваемого байта и то, что он ожидает получить от предыдущего ТМ или IR. Выполняется проверка несовпадения и тем самым неожидаемый байт С1 будет вызывать аварийный сигнал и вставлять сигнал AIS в передаваемый сигнал. Статус управления данной транспортной функции может быть блокирован или не блокирован.
7.2.9. Сетевое управление
Управление элементами сети и всей сетью SDH в целом, построенной с использованием оборудования системы передачи типа AXD-2500, осуществляется в соответствии с общей концепцией управления сетями SDH, которая изложена в разд. 5. Ниже акцентируется внимание только на некоторые особенности и детали этого управления при использовании на сети SDH мультиплексоров SMUX-2500 компании Ericsson.
При управлении каждый NE имеет уникальное наименование своего прикладного программного обеспечения - это заголовок процесса приложения APT (Application Process Title). В обычных условиях заголовок APT является «почтовым адресом» прикладного программного обеспечения. Но если оператор локального менеджера должен дистанционно регистрировать работу удаленного NE, то заголовок APT необходим, чтобы определить соответствие приложения этого элемента с ядром программного обеспечения. Это предоставляет оператору возможность использовать функции данного NE. Заголовок APT может быть использован также для идентификации элемента системы передачи AXD-2500 в сети, если это необходимо для системы управления.
Положения NE представляют адреса точек доступа сетевого сервиса NSAP. Это означает, что каждый NE требует персонального адреса NSAP, элементы в сети управления используют протокол маршрутизации между оконечной и промежуточной системами передачи ES-IS. Структура адреса для указанного протокола показана на рис. 7.17. Ёмкость адреса NSAP не превышает 20 байт, когда он закодирован в соответствии с установленным двоичным кодированием. Правила кодирования определены стандартом ISO 8348/Add.2. Поле адреса NSAP разделено на две основные части: начальную часть области IDР и специфическую часть области DSP.
Начальная часть состоит из идентификатора полномочий и формата AFI и идентификатора начальной области IDI (см. подразд. 5.4.2, рис. 5.19).
|
IDР |
DSP |
||||
|
AFI |
IDI |
DP |
АР |
SID |
NS |
|
1 байт |
2 байт |
10 байт |
6 байт |
1 байт |
|
Рис. 7.17
Идентификатор AFI определяет следующее:
размер (формат) идентификатора начальной области IDI;
полномочия, ответственные за распределение значений IDI (есть ли значимые нули: если есть, то заполняют единицами, а иначе - заполняют нулями);
абстрактный синтаксис, который нужно использовать для специфической части области (домена) DSP;
- максимальная емкость (размер) области DSP.
Идентификатор IDI определяет следующее:
адресация области, из которой принимаются значения специфической части области DSP;
полномочия, ответственные за распределение значений от области адресации к области DSP.
Часть области DSP разделена на четыре составляющих: часть области DP (Domain Part), часть региона АР (Area Part), идентификатор системы SID (System Identifier) и сетевой селектор NS (Network Selection).
Идентификатор SID должен быть уникален внутри области маршрутизации, где размещена система, которую он идентифицирует. Однако часто необходимо определить идентификаторы, которые являются уникальными внутри всей сети. В этом случае рекомендуется задать значение SID такое же, как соответствующий идентификатор элемента сети NE. Последний определяет наименование NE и работает как и его имя. Это дает возможность сетевому менеджеру NM убедиться в том, что в настоящее время он связан и работает с нужным (правильным) NE.
Применение на сети SDH, построенной с использованием оборудования системы передачи AXD-2500, каналов ЕСС и DCC в системе управления TMN типовое. Оно описано в подразд. 5.4.1, 5.4.2 и показано на рис. 5.14, 5.18.
7.3. Особенности построения блоков системы передачи
7.3.1. Оконечный блок доступа типа ТАU 4 х 140
Блок имеет четыре двунаправленных тракта и обеспечивает одновременную обработку четырех сигналов. В каждом тракте передачи обработка начинается с поступления сигнала Е4 (D4) на вход блока и заканчивается выходами из блока двух (основного и резервного) внутренних сигналов stm-1p. В тракте приема сигналы обрабатываются в обратном порядке, т. е. от поступления двух внутренних сигналов stm-1p на один из входов блока до появления сигналов Е4 (D4) на соответствующих выходах блока.
Аппаратурная реализация блока ТАU 4 х 140 обеспечивает следующие функции:
преобразование кода стыка CMI в бинарный код BIN, или двоичный код в тракте передачи и обратное преобразование в тракте приема;
выполнение шлейфов;
синхронизация сигналов Е4 (D4) и stm-1p в трактах передачи и приема;
преобразование сигналов Е4 (D4) в формат модуля stm-1p в трактах передачи и обратное преобразование в трактах приема;
заполнение служебных байтов в циклах передачи сигналов в трактах передачи и обработка указанных байтов в трактах приема;
блокировка в цикле передачи модуля stm-1p;
выполнение защитного переключения.
Функции программного обеспечения блока TAU 4 х 140 управляются процессором UP блока, который обеспечивает следующие возможности:
установку режима функционирования микросхем ASIC в блоке;
сбор индикаций;
обработку заголовка POH;
принятие решения о необходимости защитного переключения;
вычисление статистики качества транспортирования сигналов;
поддержку связи с блоком управления SU (связь SU-UP).
Рассмотрим прохождение сигналов в трактах передачи и приема по схеме, изображенной на рис. 7.18, где показан один двунаправленный тракт.
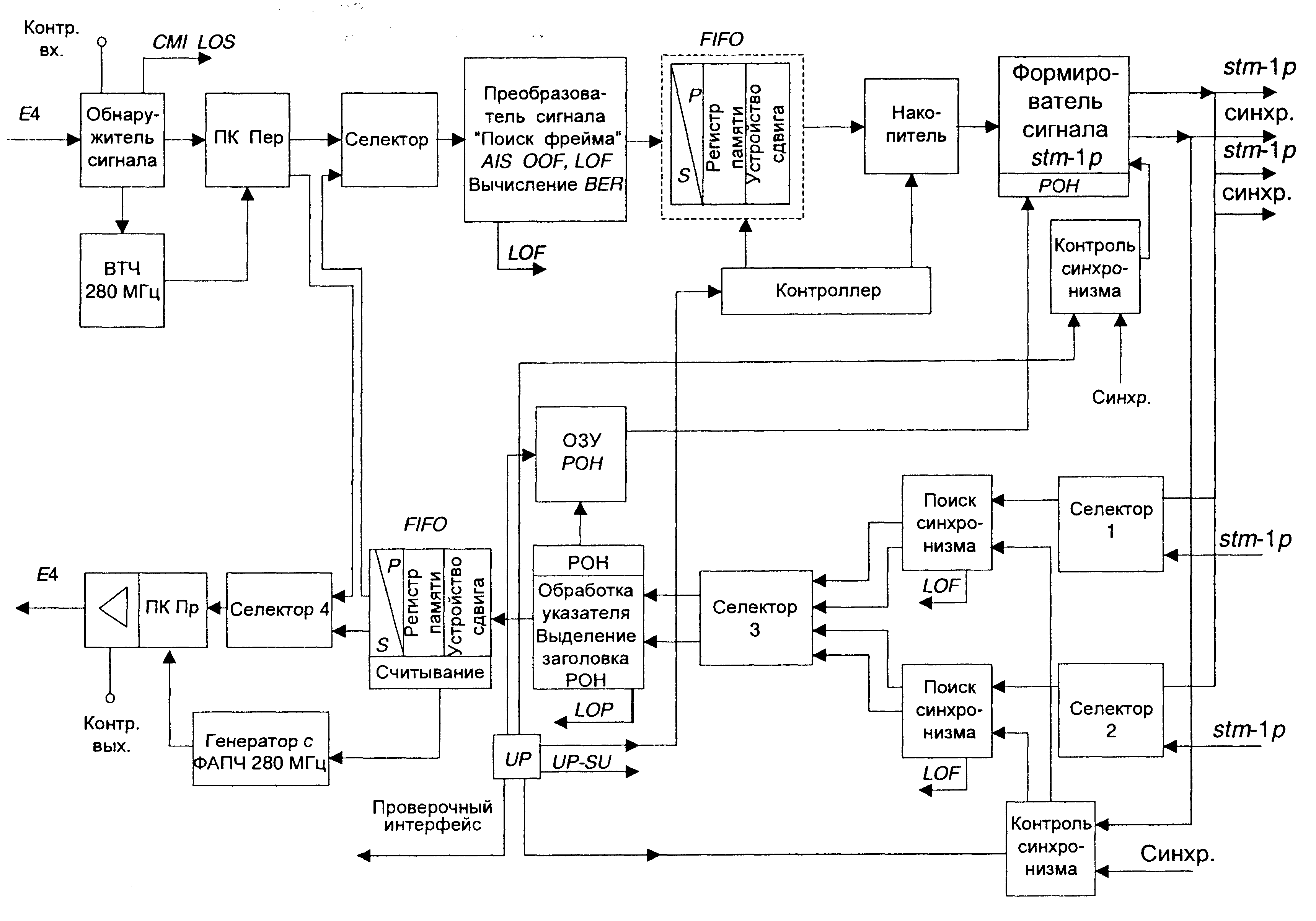
Рис. 7.18
Тракт передачи условно можно разделить на две составные части: входное устройство и преобразователь формата сигнала. Первая часть состоит из обнаружителя сигнала, преобразователя кода передачи ПК Пер и селектора, а вторая - из преобразователя структуры цикла передачи сигнала Е4, устройств FIFO и формирователя сигнала stm-1p.
Вся работа тракта передачи происходит под воздействием сигналов управления от процессора, сигналов генератора фрейма (внутреннее управление) и сигналов источника синхронизации.
Сигнал Е4 в коде СМI поступает в обнаружитель сигнала, где осуществляется его проверка на удовлетворение критерию наличия сигнала. Если сигнал слабый и принимается решение, что он не обнаружен, т. е. сигнала на входе нет, то появляется индикация СМI LOS, что означает отсутствие входного сигнала. При отсутствии такой индикации входной сигнал проходит на ПК Пер и выделитель тактовой частоты ВТЧ, или выделитель хронирующего сигнала частотой 280 МГц. В устройстве ПК Пер сигнал, поступивший в стыковом коде СМI, преобразуется в двоичный, или бинарный сигнал BIN, который проходит в селектор, или устройство выбора. Селектор служит для приема либо поступившего входного сигнала с выхода ПК Пер, либо сигнала с выхода соответствующего тракта приема данного блока (при образовании шлейфа).
Следовательно, устройство выбора обеспечивает функциональные возможности образования шлейфа на дальнем конце для данного тракта. С выхода селектора сигнал подается на преобразователь структуры сигнала Е4. Здесь цикл передачи этого плезиохронного сигнала преобразуется в сигнал контейнера С-4, структура которого показана на рис. 2.18. Происходит выравнивание цикла передачи поступившего сигнала и проверка этого выравнивания.
Выравнивание начинается с поиска байтов цикловой синхронизации А1 и А2, которые находятся на отведенных им позициях в структуре цикла передачи (фрейма).
Время выравнивания, если сигнал свободен от ошибок, не должно превышать 250 мкс (длительность двух фреймов сигнала STM-1). Когда выравнивание достигнуто, система мониторинга следит за ошибками, которые могут возникнуть в процессе обработки сигнала. При нарушении правильной битовой структуры фрейма, когда она не обнаруживается в течение 625 мкс, вводится сигнал выпадения из фрейма (вне фрейма) -OOF. Если этот сигнал остается в течение определенного времени (0...3 мс), установленного оператором с помощью процессора, то выдается аварийный сигнал LOF (Потеря фрейма). Здесь же выполняется обнаружение ошибок, их подсчет и вычисление коэффициента ошибок ВЕR.
Логически дальнейшее преобразование сформированного сигнала С-4 происходит в такой последовательности: формируется сигнал VC-4, к которому добавляется указатель, создавая сигнал AU-4; добавлением к сигналу AU-4 байтов заголовка SОН, которые устанавливаются в нулевое значение, кроме байтов А1 и А2, формируется фрейм сигнала stm‑1p.
Однако в блоке TAU 4 х 140 вышеизложенное выполняется за один шаг. Устройство FIFO (первый вошел, первый вышел) содержит преобразователь сигнала последовательный/параллельный (ASIC SIRPIT), который представляет каждый байт сигнала в регистр памяти в параллельном виде. Устройство сдвига обеспечивает прием байта Z, задержанного в сигнале С-4. Байт Z может задерживать 6 или 7 бит сигнала, чтобы один или два оставшихся бита стали битами наполнения. Они будут использованы далее при создании фрейма сигнала STM-1p. Все операции в FIFO выполняются под управлением сигналов контроллера.
Накопитель собирает и сохраняет (запоминает) сигналы перед формированием фрейма сигнала stm-1p. Необходимость этого запоминания вызвана неравномерностью поиска сигналов, который (поиск) возникает при создании фрейма сигнала stm-1p. Все собранные в накопителе сигналы: кодовые группы сигналов нагрузки (96I), байт заголовка РОН, байты X, F, Z и другие под управлением сигналов генератора внутреннего управления и под наблюдением сигналов синхронизации считываются в формирователь фрейма сигнала stm‑1p. Далее в тракте передачи вычисляется кодовая группа BIP-8, которая в следующем цикле передачи помещается на позицию байта В3 заголовка РОН.
Таким образом, в результате преобразований четырех сигналов Е4 на выходе тракта передачи блока TAU 4 х 140 появляются два потока одинаковых сигналов stm-1p, которые в сопровождении сигналов синхронизации поступают на вход блока оптического передатчика типа TXU STM-16.
Процесс формирования структуры цикла передачи сигнала stm-1p показан на рис. 7.19, краткие пояснения к которому приводятся ниже.
Цикл передачи сигнала Е4 имеет длительность 15,625 мкс и содержит 2176 бит, из которых 2148 являются информационными и 28 - служебными. Эта последовательность разбита на 4 группы по 544 бит. Каждая группа используется для передачи информационных и служебных сигналов. Например, в первой группе на позициях 1-10 передаются биты сигнала цикловой синхронизации 1111010000, на позиции 11 - бит цифровой служебной связи, на позиции 12 - бит контроля и сигнализации, на позициях 13...554 - информационные биты. Так как фрейм сигнала STM-1 имеет длительность 125 мкс, а сигнала Е4 - 15,625 мкс, то в цикле передачи сигнала STM-1 укладывается 8 фреймов сигнала Е4, что составляет 2176 байт.
Следовательно, не один цикл передачи сигнала E4, который содержит всего 272 байт (2176 бит /8), преобразуется в структуру, показанную на рис. 2.18 (20 блоков по 13 байт, что составляет 260 байт), а каждые 8 циклов передачи сигнала Е4 преобразуются в 9 строк указанной на рис. 2.18 структуры.
В результате получается, что 2176 байт восьми циклов передачи сигнала Е4 преобразуются в 2340 байт (260 байт х 9 строк), которые и представляют собой контейнер С‑4, т. е. 8 циклов передачи сигнала Е4 «загружаются» в контейнер С-4 модуля STM-1, который имеет ёмкость 2340 байт.

Рис. 7.19
Из общей разности (2340 - 2176) = 164 байт на одну строку приходится 164 байт: 9 строк = 18,2(2) байт. Это подтверждает и рис. 2.18, где показано, что из 20 байт W, X, Y и Z байт W является информационным, а байт Z информационным является лишь частично (имеет пять информационных битов). Остается 18 байт - это 5 байт X и 13 байт Y, а также «неинформационная» часть байта Z.
Тракт приема блока TAU 4x140 имеет три составные части:
входное устройство в составе трех селекторов и двух устройств поиска синхронизма;
распределитель сигнала, который образуют устройства обработки указателя и выделение заголовка РОН, а также устройства FIFO;
выходное устройство, состоящее из селектора и преобразователя кода приема ПК Пр.
Вся работа тракта приема осуществляется под воздействием сигналов управления и синхронизации.
Два потока сигналов stm-1p (основной и резервный) в двоичном коде поступают на два входа одного из четырех трактов приема. С этих входов сигналы попадают на два селектора, на которые могут приходить также одноименные сигналы stm-1p с выходов тракта передачи, т. е. здесь создается функциональная возможность выполнить шлейф сигналов stm-1p с выходов тракта передачи на входы соответствующего тракта приема.
Выбранные селекторами 1 и 2 сигналы поступают на устройства поиска синхронизма. Этот поиск основан на использовании механизма конечного состояния, который ищет в поступившем сигнале stm-1p три байта А1 и три байта А2 сигнала цикловой синхронизации. Если эти байты находятся правильно, то синхронизм для сигналов одного цикла передачи установлен. Затем ищется та же последовательность (три байта А1 и три байта А2) для следующего цикла передачи и т. д.
Механизм конечного состояния постоянно следит за правильным обнаружением байтов А1 и А2 на ожидаемых для них позициях и поддержанием установленного синхронизма принятых сигналов. Если для четырех последовательных фреймов правильная последовательность А1 и А2 на ожидаемых позициях не обнаружена, синхронизм считается потерянным, выдается аварийный сигнал LOF.
Два потока принятых синхронизированных сигналов stm-1p в сопровождении сигналов синхронизации поступают на третий селектор, который предпочтительный (более качественный) поток пропускает в устройство обработки указателя и выделения заголовка РОН. Здесь прежде всего проверяется и обрабатывается указатель AU-PTR каждого фрейма сигнала stm-1. Для этого указателя согласно Рекомендациям МСЭ-Т G.709 и G.783 определено три состояния:
состояние NORM;
AIS тракта AU-4, т. е. в указателе AU-4 PTR все единицы;
потеря указателя - LOP.
При состоянии указателя NORM заголовок РОН извлекается, записывается в ОЗУ и обрабатывается процессором UP блока TAU 4 х 140. По результатам сравнения принятого байта В3 заголовка РОН с вычисленной проверкой принятого сигнала на четность рассчитывается коэффициент ошибок. Полученные данные накапливаются в счетчике ошибок, который называется счетчиком BIP-8. Каждые 100 мс процессор UP считывает содержимое этого счетчика для представления данных в результаты текущего контроля параметров (см. подразд. 7.2.7).
Для определения коэффициента ошибок, проводятся и другие вычисления. Все вышеизложенное в отношении байта В3 выполняется и с байтом G1 заголовка РОН, чтобы установить в сигнале VC-4 ошибки для счетчика FEBE (блок с ошибками на дальнем конце).
Хотя на выходе устройства обработки указателя и выделения заголовка РОН сигнал находится еще в формате С-4, ошибки в сигнале Е4 подсчитываются в этом устройстве.
Сигнал в формате С-4 с выхода устройства обработки указателя и выделения заголовка РОН подается на регистр сдвига, который используется для «плотной упаковки» цифровых сигналов.
Частота считывания сигналов из FIFO должна быть равна средней частоте записи сигналов на его входе. Это достигается тем, что частота считывания принята равной 280 МГц, но с помощью ФАПЧ она изменяется таким образом, что считывание происходит с половинной пропускной способностью буфера FIFO, т. е. со скоростью передачи 140 Мбит/с.
Считанный сигнал Е4 поступает в селектор 4, который позволяет образовать шлейфы. Пройдя преобразователь кода ПК Пp, сигнал Е4 в коде CMI через буферный усилитель поступает на выход данного тракта приема блока TAU 4 х 140.
7.3.2. Оконечный блок доступа типа TAU 4 х STM-1e
Блок TAU 4 х STM-1e имеет четыре двунаправленных тракта и позволяет одновременно обрабатывать четыре сигнала. В каждом тракте передачи обработка начинается с поступления сигналов STM-1e на вход блока и заканчивается выходом из блока двух (основного и резервного) внутренних сигналов stm-1p мультиплексора. В тракте приема сигналы обрабатываются в обратном порядке, т. е. от поступления двух внутренних сигналов stm-1p на два входа четырех трактов приема блока до появления сигнала STM-1e на соответствующем выходе блока. Структурная схема одного двунаправленного тракта блока приведена на рис. 7.20.
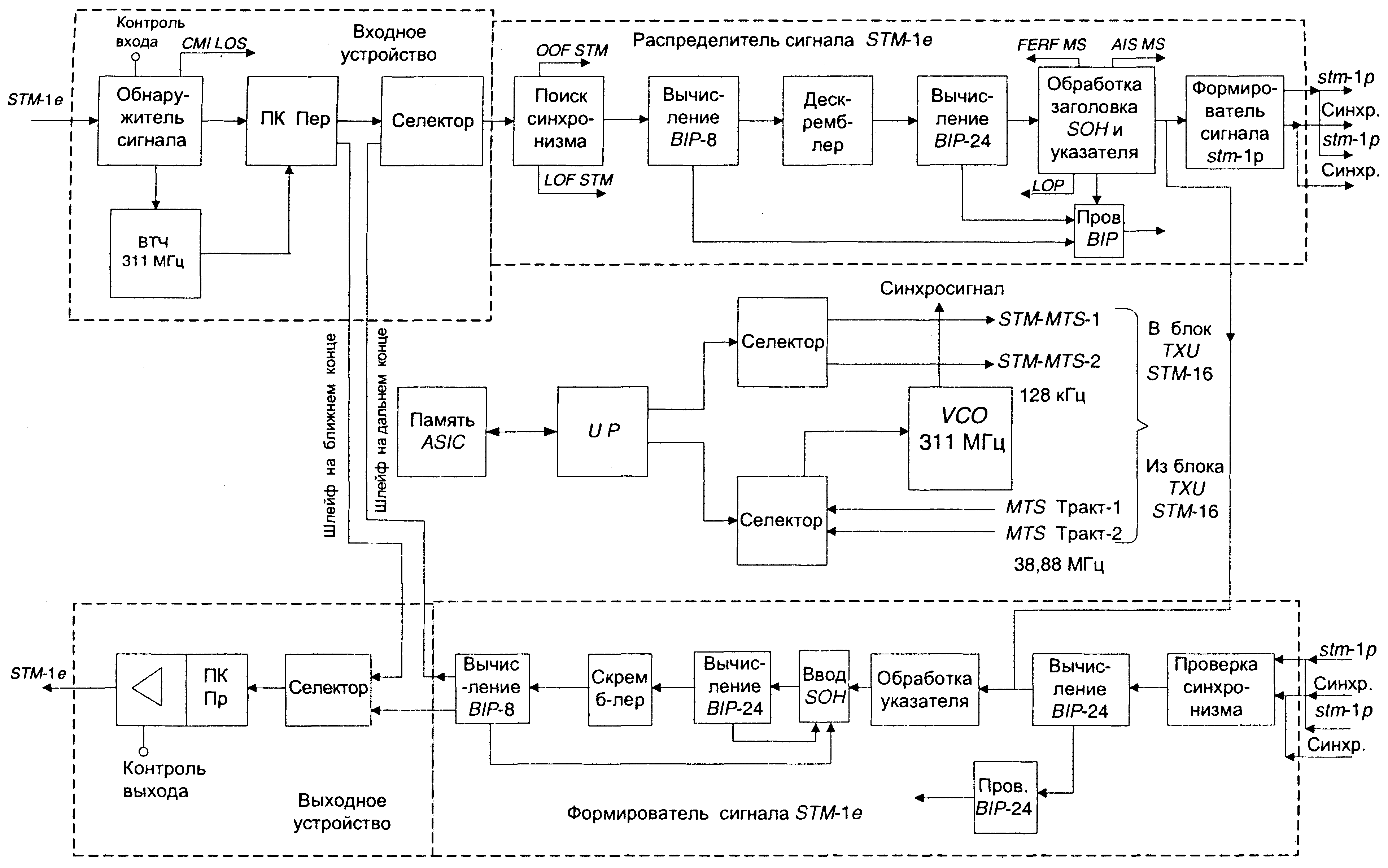
Рис. 7.20
Тракт передачи состоит из входного устройства и распределителя сигнала STM-1e. Работа устройств тракта передачи проходит под управлением сигналов процессора и синхронизации.
Сигнал STM-1e в коде CMI поступает в обнаружитель сигнала, где он проверяется по критерию наличия сигнала. Если сигнал слишком слабый и принимается решение, что он не обнаружен, то выдается индикация о потере сигнала - CMI LOS. Здесь же имеется точка контроля, которая позволяет измерить входной сигнал STM-1e без нарушения трафика. Уровень входного сигнала ослаблен на 20 дБ относительно его истинного значения. Из поступившего сигнала выделяется сигнал тактовой синхронизации, который используется для считывания передаваемого сигнала в преобразователь кода передачи ПК Пер.
С выхода преобразователя кода двоичный сигнал в сопровождении тактовой синхронизации поступает в распределитель сигнала STM-1e, в частности, в устройство выбора, или селектор. Сюда может поступать также сигнал с выхода формирователя соответствующего тракта приема, т. е. имеется функциональная возможность образования шлейфа на дальнем конце для данного тракта.
В устройстве поиска синхронизма происходит выравнивание цикла передачи поступившего сигнала STM-1e, которое начинается с поиска байтов А1 и А2 цикловой синхронизации. Они находятся на установленных для них позициях в структуре фрейма поступившего сигнала. Если этот сигнал свободен от ошибок, то время выравнивания фрейма, т. е. время вхождения в синхронизм, не должно превышать 250 мкс (длительность двух фреймов модуля STM-1).
Когда цикловая синхронизация установлена, т. е. выравнивание фрейма достигнуто, устройство синхронизации продолжает следить за отказами. Если приемник синхросигнала примет с ошибками четыре последовательные синхрогруппы (три байта А1 и три байта А2), то появляется сигнал «вне фрейма» - OOF STM. Когда сигнал «вне фрейма» сохраняется в течение заданного времени (0...3 мс), установленного оператором с помощью процессора, выдается аварийный сигнал «Потеря фрейма» - LOF STM.
В следующих устройствах тракта передачи: вычисление BIP-8, дескремблирование сигнала STM-1 и вычисление BIP-24 выполняются соответствующие обработки. Результаты указанных вычислений далее используются в устройстве проверки (сравнения) BIP для обнаружения ошибок.
В устройстве обработки заголовка SОН извлекаются байты В1, С1, D1, D2, D3 заголовка RSOH и байты В2, К2, D4, ..., D12 заголовка МSОН. Байты В1 и В2 передаются в устройство сравнения ВIP для обнаружения ошибок. Байт С1 (идентификатор сигнала STM‑1) используется процессором для сравнения с ожидаемым значением байта С1. Байт К2 анализируется, чтобы определить (узнать), есть ли активная индикация о состоянии мультиплексной секции MS: AIS MS (сигнал индикации аварии MS) или FERF MS (отказ в приеме на дальнем конце MS). Если в трех последовательных фреймах принимаемого сигнала биты 6, 7 и 8 байта К2 имеют значение «111», то появляется индикация AIS MS, а если - «110», то индикация FERF MS. Байт К1 используется для защитного переключения СЛТ (см. подразд. 7.2.4), поэтому здесь не рассматривается.
Байты D1, D2, D3 образуют канал служебной связи со скоростью передачи 64 кбит/с х 3 = 192 кбит/с на регенерационной секции, а байты D4...D12 заголовка MSOH предназначены для образования канала служебной связи на секции MS.
Устройство обработки указателя AU-4 PTR выполняет его текущий контроль и обработку в соответствии с Рекомендацией ITU-T G. 783. Структура указателя показана на рис. 2.10. Значение указателя определяется десятью битами (5 бит I и 5 бит D) байтов H1 и H2. В устройстве обработки значение указателя считывается, чтобы увидеть состояние битов I и D. Если большинство (из пяти) битов I установлены в состояние «1», то это увеличивает значение указателя на один для следующих поступающих фреймов сигнала STM-1. Если в состояние «1» устанавливаются большинство битов D, то это уменьшает значение указателя на один для последующих фреймов модуля STM-1.
В случае, когда в состояние «1» устанавливаются все 10 бит указателя, то это отмечается индикацией недопустимого значения указателя, т. е. появляется предупреждение AIS AU-4 PTR. Восемь последовательных фреймов сигнала с этой индикацией вызывает появление состояния LOP - «Потеря указателя».
Чтобы показать, что значение указателя подверглось изменению из-за новой полезной информации, используется флаг новых данных NDF. Восемь последовательных индикаций NDF вызывает появление состояния LOP.
В устройстве формирователя сигнала выполняется его преобразование к формату внутреннего сигнала stm-1p мультиплексора путем восстановления байтов А1 и А2. На выходе тракта передачи появляются два потока одинаковых сигналов stm-1p, которые в сопровождении сигналов синхронизации поступают на вход блока оптического передатчика типа TXU STM-16.
Тракт приема состоит из формирователя цикла передачи сигнала STM-1e и выходного устройства. Работа устройств тракта приема осуществляется под управлением сигналов процессора и синхронизации.
Сигнал stm-1p в двоичном коде в сопровождении сигналов тактовой синхронизации вводится в устройство проверки синхронизма. Проверка выполняется с целью выяснить: не имеют ли байты сигнала stm-1p ошибок и имеет ли сигнал цикловую структуру. Далее вычисляется BIP-24 для каждого фрейма сигнала STM-1, исключая заголовок RSOH. Результаты вычисления подаются в устройство проверки BIP-24 для сравнения и обнаружения ошибок.
Фреймы входного сигнала stm-1p и выходного сигнала STM-1e не синхронизированы. Следовательно, необходимо устройство корректировки указателя, чтобы компенсировать расхождения циклов передачи указанных сигналов. Сигнал stm-1p записывается в буфер указателя со скоростью синхронизации этого сигнала. Считывается сигнал STM-1e со скоростью синхронизации блока TAU 4 х STM-1e, который может синхронизироваться от различных источников. Различие в скоростях записи и считывания может вызвать или переполнения буфера указателя, или его опустошение. Для исключения этих явлений в устройстве, генерирующем сигнал положительного или отрицательного выравнивания указателя, установлены ограничения.
Если устройство принимает сигнал положительного выравнивания и в течение трех последних фреймов выравнивание не произошло, то биты I указателя инвертируются, а последующие фреймы будут иметь значение указателя, увеличенное на единицу.
Если устройство принимает сигнал отрицательного выравнивания и в течение трех последних фреймов выравнивание не достигнуто, то инвертируются биты D указателя, а последующие фреймы будут иметь значение указателя, уменьшенное на единицу.
Показание счетчика значений указателя будет увеличиваться, пока не будет найден байт J1 заголовка РОН (см. рис. 2.8, б). Затем счетчик будет удерживать это значение указателя. Каждое выравнивание указателя заканчивается его значением в счетчике, которое сохраняется для чтения процессором, чтобы давать индикацию о том, как хорошо (или плохо) синхронизирован блок TAU 4 х STM-1e (см. подразд. 7.2.1). Синхронизированный сигнал STM-1e с нулевыми байтами заголовка SOH поступает в устройство ввода заголовков MSOH и RSOH. Здесь же реализуется возможность ввода битовых ошибок путем инвертирования байтов В1 (RSOH) и В2 (MSOH).
Следовательно, в приемном оборудовании можно моделировать события возникновения битовых ошибок. Инверсия байта BIP-8 моделирует 8 ошибок, а инверсия трех байтов BIP-24 моделирует 24 ошибки.
Далее снова по всему сигналу, исключая заголовок RSOH, вычисляется BIP-24, сигнал скремблируется и вычисляется BIP-8.
В конце тракта приема по запросу от процессора, которым управляет оператор через блок управления SU, может устанавливаться шлейф на ближнем конце или шлейф на дальнем конце.
Выходное устройство тракта приема образуют селектор и преобразователь кода приема ПК Пр, где двоичный сигнал преобразуется в сигнал стыка в коде СМI. Этот сигнал синхронизирован частотой 311 МГц, но с помощью системы ФАПЧ считывание происходит с половинной пропускной способностью выходного буфера, т. е. со скоростью передачи 155,52 Мбит/с.
Таким образом, на выходе тракта приема будет сигнал STM-1e в коде СМI с заданными параметрами, который по стыковой цепи передается потребителю.
7.3.3. Блок оптического передатчика типа TXU STM-16 и его синхронизация
Тракт прохождения сигналов в блоке оптического передатчика можно разделить на три составные части.
Первая часть содержит устройства, через которые проходят сигналы от входа блока передатчика до формирования сигналов в формате STM-4p.
Вторая часть включает устройства, через которые передается сигнал STM-4p до получения сигналов в формате STM-16p.
Третья часть представляет собой передающий оптический модуль, который состоит из формирователя модулирующих импульсов тока, устройств, обеспечивающих и поддерживающих заданный режим работы лазера, излучающего оптический линейный сигнал уровня STM-16 с заданной выходной мощностью на заданной длине волны.
Функциональная схема блока оптического передатчика изображена на рис. 7.21.
Рассмотрим кратко прохождение сигналов по представленной схеме.

Рис. 7.21
Шестнадцать сигналов stm-1p в параллельном формате (4 бит) в сопровождении синхроимпульсов с частотой следования 38,88 МГц (38,88x4 = 155,52) поступают на 16 входов передатчика. По команде блока управления SU, поступающей от процессора передатчика (на схеме не показано), кросс-коннектор 16 : 4 соединяет любой из приходящих сигналов с одним из выходов. Вся информация о том, какие выходы кросс-коннектора использовать и какие входные сигналы на них подавать, содержится в блоке SU.
Из четырех отдельных сигналов stm-1p формируется цикл передачи с использованием шести байтов цикловой синхронизации А1 и А2. Происходит преобразование сигналов к формату байтовой структуры сигнала STM-1 и выравнивание цикла передачи сигнала STM-1. В случае потери сигнала выдается индикация LOS. Кроме того, формируется индикация AIS AU-4 вследствие:
потери входного сигнала stm-1p;
обнаружения AIS AU-4 во входном сигнале stm-1p;
требования процессора ввести AIS AU-4, возникающего как результат его реакции на какую-либо другую индикацию.
В мультиплексоре MUX STM-4 путем чередования байтов из каждых четырех сигналов STM-1 формируется сигнал STM-4 (см. рис. 2.20, левая часть). Выходной сигнал STM-4p этого мультиплексора считывается с частотой 77,76 МГц. Этот сигнал внутрифреймовой синхронизации генерируется формирователем фреймов сигнала STM-16 и определяет положение фрейма выходящего сигнала STM-4p. Функция наблюдения внутри мультиплексора МUX STM-4 периодически проверяет поступающие синхроимпульсы считывания, и если их фаза выходит за допустимые пределы, выполняет коррекцию фазы импульсов внутрифреймовой синхронизации.
Четыре сигнала STM-4p, поступающие на четыре входа демультипле-сора DMUX STM‑4p вместе с соответствующими сигналами синхронизации, из-за различного времени задержки будут иметь разные сдвиги по фазе. Устройство выравнивания фазы компенсирует эти фазовые сдвиги. С выходов четырех демультиплексоров DMUX STM-4p шестнадцать сигналов STM-1 для дальнейшей обработки поступают на входы кросс-коннектора 16:16 (см. подразд. 7.2.2). В последующих устройствах формируются и вставляются байты заголовков MSOH и RSOH.
Байты заголовка RSON. Прежде всего в заголовок RSON вводятся байты А1 и А2 сигнала цикловой синхронизации (байты выравнивания фрейма). Для синхронизации каждого сигнала STM-1 используется шесть байтов: три байта А1 и три байта А2. Тогда для синхронизации модуля STM-16 всего используется 96 байт: 48 байт А1 + 48 байт А2. Значения байтов: А1 = 11110110; А2 = 00101000.
Байт В1 первого цикла передачи сигнала STM-1 формируется в устройстве вычисления BIP-8. Для имитации ошибок вычисленный байт В1 перед вставкой в заголовок RSOH может инвертироваться. Есть возможность имитировать значения коэффициентов ошибки ВЕR от 10-6 до 10-9. Выбранные значения коэффициентов ВЕR задаются процессором в полубайте управления, который располагается в памяти ASIC процессора. Для задания выбранного значения коэффициента ВЕR, ошибки должны быть вставлены в байт В1 через правильные интервалы.
Байт С1 является идентификатором сигналов STM-1 в структуре модуля STM-16.
Для 1-го сигнала STM-1 байт С1 = 00000001.
Для 2-го сигнала STM-1 С1 = 00000010.
Для 3-го сигнала STM-1 С1 = 00000011.
Для 4-го сигнала STM-1 С1 = 00000100 и т. д...
Для 16-го сигнала STM-1 C1 = 00010000.
Эти значения байта С1 хранятся в памяти ASIC процессора и оператор имеет доступ к ним для контроля (сравнения).
Байты D1, D2 и D3 канала служебной связи DCC-R передаются в последовательном битовом формате, а байты E1 и F1 передаются из блока OHAU и вводятся через интерфейс OWD каналов служебной связи.
Байты заголовка MSOH. Три байта В2 каждого фрейма сигнала STM-1 формируются в устройстве вычисления BIP-24. Для имитации ошибок вычисленные байты В2 перед вставкой в заголовки MSOH фреймов STM-1 № 1 ... STM-1 № 16 инвертируются. Можно имитировать коэффициенты ВЕR от 10-3 до 10-9. Выбранные значения коэффициентов ВЕR задаются процессором в полубайте управления, который располагается в памяти ASIC процессора. Для задания выбранного значения коэффициента ВЕR, ошибки также должны быть вставлены в байты В2 через правильные интервалы.
Байты D4...D12 канала служебной связи DCC-M по команде процессора передаются в последовательном битовом формате, а байт Е2 вводится с интерфейса OWD.
Байт К2 используется для контроля состояния мультиплексной секции. По команде процессора в цикл передачи сигнала STM-1 № 1 вставляются индикации AIS MS и AIS FERF, которые передаются с использованием битов 6, 7 и 8 байта К2: комбинация этих битов «111» означает индикацию AIS MS, а комбинация «110» - индикацию FERF MS. Прием на другом конце участка СЛТ трех последовательных фреймов сигнала STM-1 № 1 с данными комбинациями сигнализирует о том, что указанные индикации включены.
Здесь уместно подчеркнуть, что вычисление BIP-24 выполняется для фреймов одного сигнала STM-1, например, для фреймов сигнала STM-1 № 1 и затем полученные значения трех байтов В2 загружаются в циклы передачи последующих сигналов от STM-1 № 2 до STM‑1 № 16. Таким образом, контроль ошибок на мультиплексной секции для сигнала уровня STM-16 выполняется вычислением BIP-384 = 16 х BIP-24.
Далее 16 модулей STM-1p мультиплексируются методом чередования байтов (см. рис. 2.21) и полученный сигнал STM-16p скремблируется.
Байт BIP-8 вычисляется для всего скремблированного фрейма сигнала STM-16. Результаты помещаются на позиции байта В1 заголовка RSOH следующего фрейма сигнала STM-16 перед его скремблированием. При этом может выполняться ввод ошибок.
Выходной буфер синхронизирует выходной сигнал уровня STM-16 синхроимпульсами частотой 2488,32 МГц. Этот сигнал синхронизации фрейма определяет (фиксирует) положение сигнала STM-16p. Управляющее устройство периодически проверяет поступающие синхроимпульсы, и если их фаза выходит за допустимые пределы, выполняет коррекцию фазы импульсов внутрифреймовой синхронизации (рис. 7.23).
В выходном буфере выполняется также преобразование сигнала STM-16p в последовательный сигнал STM-16, который в сопровождении сигнала синхронизации подается в оптический модуль, где преобразуется в оптический ЦЛС для передачи по одномодовому волокну СЛТ.
Структурная схема оптического модуля показана на рис. 7.21. Принцип работы модуля и варианты его функциональной и принципиальной схем приведены на рис. 3.21, 3.22 и 3.23, а их описание - в подразд. 3.3.3.
Основные технические данные оптического передатчика приведены в подразд. 7.1.4. Конструктивно блок представляет собой набор печатных плат. На передней панели блока всего три детали: проверочный (12-контактный) разъем для подключения процессора и два светодиода - зеленый (питание включено) и красный, свечение которого означает, что внутри блока оптического передатчика произошла авария.
Перейдем к вопросу о тактовой синхронизации оптического передатчика типа TXU STM-16 и системы передачи типа AХD-2500 в целом.
На внутренних интерфейсах при формировании и обработке сигналов stm-1p, stm-4p и stm‑16p мультиплексор SMUX-2500 работает асинхронно. Частотные и фазовые различия между указанными сигналами и передаваемым оптическим ЦЛС уровня STM-16 на выходе оптического передатчика учитываются и устраняются путем регулировки указателей с помощью процессоров UP блоков TAU 4 х STM-1e и TXU STM-16. Выходные и входные порты уровня STM-16 в одном мультиплексоре SMUX-2500 синхронизируются от одного и того же источника тактовой синхронизации.
Для этого каждый блок оптического передатчика TXU STM-16 содержит субсинхронный источник сигналов синхронизации оборудования Sub-SETS, как показано на рис. 7.22. В этом источнике осуществляется выбор входного синхросигнала, управление этим выбором, а также управление формированием выходных сигналов синхронизации. Блок Sub-SETS обеспечивает выдачу сигналов синхронизации для блока TXU STM-16 и всего мультиплексора SMUX-2500, а также используется как источник внешней синхронизации.
Выходной информационный сигнал уровня STM-16 и выходные сигналы синхронизации частотой 2,048 МГц могут быть синхронизированы следующими источниками:
одним из двух внешних генераторов синхроимпульсов частотой 2,048 МГц, удовлетворяющих Рекомендации ITU-T G. 703.10;
одним из входящих сигналов STM-1e или STM-16;
встроенным внутренним генератором, который находится в шлейфе подстройки частоты блока Sub-SETS.
В общем случае блок Sub-SETS имеет следующие входные и выходные интерфейсы синхронизации:
четыре входных потока синхроимпульсов STM-1 - MTS частотой 155,52 МГц и четыре выходных потока синхроимпульсов MTS - STM-1 частотой 38,88 МГц, которые используются только при работе оконечных блоков доступа типа ТАU 4 х STM-1e и не используются при обработке цифровых потоков со скоростью передачи 140 Мбит/с, т. е. при работе оконечных блоков доступа типа TAU 4x140;
два входных и два выходных потока синхроимпульсов частотой 2,048 МГц, удовлетворяющих Рекомендации ITU-T G. 703.10;
один входной RXU-MTS и один выходной MTS-RXU потоки синхроимпульсов с частотами 128 кГц и 77,76 МГц соответственно;
один входной и один выходной потоки синхроимпульсов частотой 2488,32 МГц, которые называются MTS-MTS.
Структурная схема блока Sub-SETS приведена на рис. 7.23. Основными устройствами блока являются:
внутренний генератор частотой колебаний 16,384 МГц;
три мультиплексора MUX 1, MUX 2 и MUX 3;
три умножителя частоты, обеспечивающие формирование частот 2,048; 51,84 и 2488,32 МГц.

Рис. 7.22

Рис. 7.23
Внутренний генератор всегда «привязан» по частоте к используемому входному синхросигналу какого-либо из источников, и если синхросигнал этого источника исчезает, то внутренний генератор берет на себя функции источника синхроимпульсов, пока не будет найден другой, более качественный, источник синхросигнала.
Внутренний генератор включается при появлении индикации «Потеря синхросигнала» и может работать либо на частоте по умолчанию (режим работы «Свободный»), либо на частоте источника синхросигнала, зафиксированной перед его исчезновением (режим «Фиксация»).
Рассмотрим работу внутреннего генератора более подробно.
В рабочем режиме шлейф подстройки частоты внутреннего генератора отслеживает изменения частоты сигнала выбранного источника синхронизации. Это осуществляется путем регулярного сравнения частоты сигнала внутреннего генератора с частотой сигнала на выходе мультиплексора MUX1. Для каждого сравнения выполняется 10 измерений. Одно измерение занимает 0,5 с, в течение которых процессор UP регистрирует разницу в частотах. Все измерения независимы. Результаты измерений оцениваются процессором UP. После обработки результатов измерений процессор UP в случае необходимости изменяет частоту сигнала внутреннего генератора.
При потере сигнала источника синхронизации внутренний генератор автоматически переходит в режим фиксации, т. е. становится источником синхроимпульсов. Это дает блоку управления SU мультиплексора SMUX-2500 время для анализа и оценки ситуации и выбора нового источника синхросигнала в соответствии с таблицами его приоритетов.
После выбора нового источника синхронизации частота внутреннего генератора снова сравнивается с частотой сигнала выбранного источника синхроимпульсов. Затем следует описанная выше процедура, т. е. частоты сигналов будут сравниваться на протяжении десяти полусекундных интервалов, пока частота внутреннего генератора не изменится в сторону частоты входного синхросигнала.
Переключение источников синхронизации, осуществляемое по команде блока управления SU через процессор UP блока TXU STM-16, не приводит к возникновению битовых ошибок в передаваемых сигналах.
Источникам синхроимпульсов можно установить разные приоритеты. Если какой-либо задействованный источник выйдет из строя, то он будет заменен другим (исправным) источником с более высоким приоритетом. Однако в любом случае переключение источников синхроимпульсов осуществляется через внутренний генератор. Решение о переключении (возвращении) к первоначальному (восстановленному) источнику синхроимпульсов принимается только процессором UP блока TXU STM-16.
Мультиплексоры MUX1 и MUX2 образуют устройство (блок) синхронизации передатчика. Мультиплексор MUX1 служит для выбора одного из трех входящих синхросигналов, а мультиплексор MUX2 представляет собой логику управления устройством синхронизации блока TXU STM-16. Управление работой указанного устройства осуществляется с процессора UP.
Умножитель 1 предназначен для получения на его выходе синхросигнала частотой 51,84 МГц. Вместе с внутренним генератором он осуществляет замену входного источника синхроимпульсов либо при его пропадании, либо по команде с процессора UP на переключение источника синхросигналов.
Входной сигнал умножителя частотой 128 кГц увеличивается по частоте в 405 раз, что приводит к возрастанию уровня фазового шума на выходе умножителя на 52 дБ. Система ФАПЧ умножителя служит для сведения к минимуму влияния этого шума на выходной сигнал и уменьшает незначительные фазовые и частотные изменения сформированного выходного сигнала.
Умножитель 2 предназначен для получения на его выходе синхросигнала частотой 2488,32 МГц. Входным сигналом умножителя 2 является выходной сигнал умножителя 1. Частота этого сигнала 51,84 МГц увеличивается в 48 раз. Последовательность синхроимпульсов, получаемая на выходе умножителя 2, используется для синхронизации выходного оптического ЦЛС уровня STM-16. Система ФАПЧ умножителя повышает устойчивость этой синхронизации.
Умножитель 3 предназначен для получения на его выходе двух синхросигналов частотой 2,048 МГц, используемых в качестве внешних источников синхронизации. Источником входного сигнала умножителя 3 может быть либо сигнал RXU-MTS частотой 128 кГц, поступающий на вход 1 мультиплексора MUX3 из блока RXU STM-16 тракта приема данной системы передачи AXD-2500, либо сигнал с выхода умножителя 1 частотой 51,84 МГц, поступающий на вход 0 мультиплексора MUX3 через делитель частоты на 405. Выбор источника входного сигнала осуществляет мультиплексор MUX3, который управляется процессором UP. Система ФАПЧ умножителя обеспечивает выходным сигналам качество, предъявляемое к ним Рекомендацией ITU-T G. 703.10.
Если входной линейный сигнал приемника RXU STM-16 пропадает или ухудшается его качество (входной ЦЛС принимается с ошибками), то сигналы на выходе умножителя 3 выключаются. Они выключаются также при переходе внутреннего генератора в режим фиксации. Операции выключения сигналов на выходе умножителя 3 выполняются и контролируются процессом UP.
Таким образом, оптический ЦЛС, сформированный в блоке TXU STM-16 и поступающий на его выход со скоростью передачи 2488,32 Мбит/с, может быть синхронизирован по тактовой частоте одним из следующих четырех сигналов (все они делятся по частоте до 128 кГц):
1) одним из двух внешних сигналов синхронизации частотой 2,048 МГц, удовлетворяющих требованиям Рекомендации ITU-T G. 703.10;
сигналом синхронизатора RXU-MTS, полученным из входного линейного сигнала приемника RXU STM-16 путем деления тактовой частоты этого сигнала на 19440, т. е. 2488,32 МГц / 19440 = 128 кГц (при появлении некоторых сигналов AIS: LOS, LOF, Excessive BER Value и др., обозначающих неисправность источника сигнала синхронизации или прием входного ЦЛС с ошибками, устройство RXU-MTS 128 кГц в блоке RXU STM-16 будет выключено);
одним из четырех сигналов синхронизатора STM-1 - MTS: 155,52 МГц / 1215 = = 128 кГц (при потере входного передаваемого сигнала STM-1e или при поступлении его на вход блока TAU 4 х STM-1e с ошибками, устройство STM-1 - MTS в указанном блоке будет выключено);
сигналом внутреннего генератора частотой 16,384 МГц: 16,384 Мгц / 128 = 128 кГц (используется при замене источника синхронизации по команде с процессора UP или когда все три указанных выше источника синхросигналов отсутствуют по какой-либо причине).
7.3.4. Блок оптического приемника типа RXU STM-16
Блок имеет два типа оптических интерфейсов для связи на большие расстояния: 1300 нм и 1550 нм. Оба интерфейса специфицированы в соответствии с Рекомендацией ITU‑T G. 957, которая выполняется в условиях стандартных режимов эксплуатации, включая эффекты старения.
Оптический приемный модуль блока включает собственно приемник оптического сигнала (оптоэлектронный преобразователь) с устройствами контроля, усиления и коррекции (см. рис. 3.33) и регенератор станционный. Последний регенерирует электрический сигнал STM-16, полученный на выходе оптоэлектронного преобразователя. В регенераторе станционном также выделяется сигнал тактовой синхронизации для хронирования принятого сигнала STM-16.
Таким образом, поступивший оптический сигнал STM-16 преобразуется в электрический, регенерируется и хронируется. После этого начинается его обработка как сигнала тракта приема системы передачи SDH уровня STM-16.
Структурная схема блока оптического приемника приведена на рис. 7.24. Сигнал, поступивший с выхода станционного регенератора преобразуется из последовательного представления в параллельное. В устройстве поиска синхронизма происходит выравнивание фрейма поступившего сигнала. Оно начинается с поиска последовательности 96 байт цикловой синхронизации: 48 байт А1 и 48 байт А2, которые находятся в структуре принятого сигнала STM-16. Эти байты были введены в начало заголовка RSOH при формировании передаваемого сигнала STM-16 в блоке TXU STM-16 на противоположном конце участка СЛТ.

Рис. 7.24
Если сигнал цикловой синхронизации (последовательность байтов А1 и А2) обнаружен и он свободен от ошибок, то время вхождения в синхронизм (выравнивание фрейма) не должно превышать 250 мкс (два фрейма). Когда выравнивание фрейма достигнуто, т. е. цикловая синхронизация установлена, вводится и сохраняется непрерывный контроль за состоянием синхронизма принимаемых сигналов.
В следующих устройствах тракта приема: вычисление BIP-8, дескремблирование, байт-демультиплексирование и вычисление BIP-24 выполняются соответствующие обработки.
Вычисление байта BIP-8 ведется в течение всего цикла передачи сигнала STM-16 перед его дескремблированием. Полученные результаты передаются в устройство сравнения BIP, а обнаружение ошибок сообщаются функции SEMF (функция управления синхронным оборудованием). Затем сигнал STM-16 дескремблируется. Байт-демультиплексирование модуля STM-16 в шестнадцать сигналов STM-1 показано на рис. 7.25. Вычисление трех байтов BIP-24 выполняется во всех 16 сигналах STM-1, формируя таким образом значение BIP-384 = 16 х ВIР-24. Полученные результаты передаются в устройство сравнения BIP, а обнаруженные ошибки сообщаются функции SEMF.
Устройствами выделения секционных заголовков RSOH и MSOH заканчивается блок ОРС - окончание регенерационной секции (см. рис. 3.43, 3.44).
В заголовке RSOH выделяются следующие байты:
B1 - передается в устройство сравнения BIP для мониторинга битовых ошибок способом контроля четности 8 чередуемых бит BIP-8 во всех циклах передачи сигнала STM-16 на регенерационной секции;
С1 - передается в память ASIC процессора, куда процессор может обращаться и сравнивать полученные значения идентификаторов сигналов STM-1 с имеющимися в памяти значениями, чтобы инициировать аварию несоответствия;
D1, D2, D3 - передаются в процессор для образования на регенерационной секции канала служебной связи DCC-R со скоростью передачи 192 кбит/с;
E1 - передается на интерфейс OWD и далее в блок OHAU для образования канала служебной телефонной связи на регенерационной секции (участковая служебная связь - УСС);
F1 - передается на интерфейс OWD и далее в блок OHAU для образования цифрового канала служебной связи (передачи данных) со скоростью передачи 64 кбит/с на регенерационной секции.

Рис. 7.25
В заголовке MSOH выделяются следующие байты:
В2 - передаются в устройство сравнения BIP для мониторинга битовых ошибок способом контроля четности 24 чередуемых бит (BIP-24, три байта В2) для всех 16 сигналов STM-1 на мультиплексной секции;
D4...D12 - могут образовать канал служебной связи DCC-М на мультиплексной секции со скоростью передачи 9 х 64 кбит/с = 576 кбит/с;
Е2 - передается на интерфейс OWD и далее в блок OHAU для образования канала служебной телефонной связи на мультиплексной секции (постанционная служебная связь - ПСС);
K1, K2 - образуют каналы для передачи сигналов принудительного и автоматического переключения защиты мультиплексной секции (см. подразд. 7.2.4);
Байт К2 используется также для контроля состояния мультиплексной секции путем приема индикаций AIS MS и FERF MS.
После выделения заголовков SOH, 16 сигналов в формате AU-4 поступают на вход кросс-коннектора. Его блок-схема приведена на рис. 7.8, в, а ее краткое описание - в подразд. 7.2.2.
Вся работа блока приемника проходит под управлением блока управления SU с помощью процессора UP, который связан с блоком SU через интерфейс SU-UP.
В блоке приемника можно образовать два шлейфа: шлейф на дальнем конце, когда принятый сигнал STM-16 с выхода станционного регенератора в последовательном формате подается на вход оптического модуля передатчика, и шлейф на ближнем конце, когда сигнал STM-16 с выходного буфера передатчика в параллельном формате подается на вход устройства поиска синхронизма приемника. Это позволяет реализовать функцию самодиагностики, которая используется для точного определения места неисправности или аварии в СЛТ. Необходимо помнить, что нельзя оба шлейфа выполнять одновременно.
Блок приемника синхронизируется от входного линейного сигнала STM-16, из которого в станционном регенераторе выделяется сигнал тактовой частоты (сигнал хронирования). Этот сигнал посылается также в блок оптического передатчика (синхронизация RXU-MTS) к источнику синхронизации Sub-SETS. Если указанный входной сигнал STM-16 принимается искаженным, то приемник переходит к синхронизации от источника Sub-SETS (синхронизация MTS-RXU). Если и этот сигнал будет потерян, то блок приемника будет синхронизирован от собственного аварийного генератора тактовой синхронизации (аварийный ГТС), но в таком случае сигнал AIS STM-1p посылается через все 16 выходов сигналов STM-1p приемника.
Основные технические данные вариантов оптического приемника приведены в подразд. 7.1.4. Конструктивно блок приемника представляет собой набор печатных плат. На передней панели блока имеется два светодиода: зеленый (питание включено) и красный, который загорается при возникновении аварии внутри блока оптического приемника типа RXU STM-16.
7.3.5. Блок промежуточного регенератора типа IRU STM-16
В блоке линейного (промежуточного) регенератора тракт прохождения сигналов STM‑16 можно разделить на четыре составные части (см. рис. 3.39, 3.44):
Первая часть содержит приемный оптический модуль (оптический приемник), в котором поступивший оптический сигнал STM-16 преобразуется в электрический, регенерируется и хронируется.
Вторая часть состоит из устройств блока ОРС, где принятый сигнал дескремблируется, байт-демультиплексируется и из него выделяются байты заголовка RSOH.
Третья часть состоит из устройств блока начала регенерационной секции (НРС), к которым относятся устройства ввода (вставки) байтов заголовка RSOH, байт-мультиплексирования и скремблирования.
Четвертая часть содержит передающий оптический модуль (оптический передатчик), где электрический сигнал STM-16 преобразуется в оптический ЦЛС уровня STM-16 и передается (вводится) в одномодовое волокно оптической секции следующего участка СЛТ.
Линейный регенератор оборудован двумя типами оптического интерфейса для связи на большие расстояния на длинах волн 1300 и 1550 нм.
Структурная схема регенератора показана на рис. 7.26. Входной оптический сигнал STM-16 поступает в оптический приемный модуль и преобразуется в электрический сигнал, который регенерируется в устройстве регенерации электрического сигнала РЭС. Здесь же из восстановленного сигнала выделяется сигнал хронирования частотой 2488,32 МГц для тактовой синхронизации передаваемого (выходного) сигнала STM-16. На этом заканчивается первая часть тракта прохождения сигналов в блоке линейного регенератора.
Далее сигнал поступает в блок ОРС, где вначале он преобразуется из последовательного представления в параллельное, синхронизируется, затем вычисляются байты BIP-8 и сигнал дескремблируется. Вычисление байта BIP-8 выполняется в течение всего цикла передачи сигнала STM-16 перед его дескремблированием. Результаты вычисления передаются в устройство сравнения BIP-8, а обнаруженные ошибки сообщаются в блок управления синхронным оборудованием SEMU. Байт-демультиплексирование сигнала STM-16 в 16 сигналов STM-1 показано на рис. 7.25.
Блок ОРС в соответствии с Рекомендацией ITU-T G.783 завершается устройством выделения байтов заготовка RSOH, к которым относятся:
В1 - передается в устройство сравнения BIP-8 для мониторинга битовых ошибок способом контроля четности 8 чередуемых бит во всех циклах передачи сигнала STM-16 на уровне регенерационной секции;
С1 - передается в память ASIC процессора, куда процессор может обращаться и сравнивать полученные значения идентификаторов сигналов STM-1 с имеющимися в памяти процессора значениями, чтобы инициировать аварию несоответствия;
D1, D2, D3 - передаются в процессор для образования канала служебной связи DCC-R на регенерационной секции;
E1 - передается на интерфейс OWD и далее в блок OHAU для образования канала служебной телефонной связи на регенерационной секции (УСС);
F1 - передается на интерфейс OWD и далее в блок OHAU для образования цифрового канала служебной связи со скоростью передачи 64 кбит/с на регенерационной секции.

Рис. 7.26
Следующим устройством регенератора является устройство ввода (вставки) байтов заголовка RSOH. С этого устройства начинается третья часть тракта прохождения сигналов STM-16 в линейном регенераторе, или блок начала регенерационной секции.
Формирование заголовка RSOH начинается с ввода байтов А1 и А2 сигнала цикловой синхронизации, или байтов выравнивания фрейма, которые занимают позиции первых шести байтов первой строки заголовка RSOH (см. рис. 2.8, в). Далее на отведенные им в заголовке последовательные места (позиции) вставляются байты, указанные выше, а именно: C1, B1, E1, F1, D1, D2, D3. Здесь уместно напомнить, что при этом некоторые байты, например, байты неиспользуемых в данном регенераторе каналов служебной связи, просто транслируются из устройства выделения байтов заголовка RSOH в устройство их ввода.
В устройстве байт-мультиплексирования осуществляется объединение 16 сигналов STM-1 в модуль STM-16, как показано на рис. 2.21. Затем сформированный сигнал скремблируется и для всего скремблированного фрейма сигнала STM-16 вычисляется байт BIP-8. Результаты вычисления помещаются в байт В1 заголовка RSOH следующего фрейма сигнала STM-16 перед его скремблированием. При этом может выполняться ввод ошибок. Затем выполняется преобразование сигнала STM-16p в последовательный сигнал STM-16.
Выходным устройством (буфером) блока НРС заканчивается третья часть схемы линейного регенератора. В буфере выходной сигнал STM-16 тактируется синхроимпульсами, выделяемыми из входного линейного сигнала (сквозная синхронизация). Вновь сформированный сигнал STM-16 в сопровождении сигнала синхронизации передается в передающий оптический модуль, который является четвертой частью схемы регенератора. Здесь поступивший сигнал преобразуется в оптический ЦЛС для передачи по одномодовому волокну СЛТ. Принцип работы оптического модуля описан в подразд. 3.3.3.
Основные технические данные вариантов линейного регенератора приведены в подразд. 7.1.4. Они определяются общими параметрами системы передачи типа AXD-2500, параметрами оптического приемника в точке R и параметрами оптического передатчика в точке S.
Конструктивно блок линейного регенератора представляет собой набор печатных плат. На передней панели блока имеется два светодиода: зеленый (питание включено) и красный, который загорается при возникновении аварии в блоке.
7.3.6. Блок каналов служебной связи типа OHAU
Блок каналов служебной связи, или блок доступа к байтам заголовка SOH типа ОНАU, далее для определенности и краткости будет называться блок КСС.
Блок КСС может использоваться в терминальном мультиплексоре типа ТМ-2500 и в промежуточном регенераторе типа IR-2500, принимая, обрабатывая и передавая байты E1 и F1 заголовка RSOH и байт Е2 заголовка MSOH. Эти байты вставляются и выделяются на так называемом интерфейсе служебного канала OWD. Байты E1 и F1 образуют два канала служебной связи на регенерационной секции. При этом с использованием байта E1 образуется канал служебной телефонной связи, а байт F1 позволяет образовать цифровой канал служебной связи для передачи данных.
Канал передачи данных имеет скорость передачи 64 кбит/с и доступен с помощью сонаправленного интерфейса в соответствии с Рекомендацией ITU-T G.703 (см. подразд. 2.4.5).
Доступ к байтам E1 и Е2 осуществляется с помощью внешнего телефонного аппарата, который может быть аналоговым (АТА) или цифровым (ЦТА). Они подключаются к блоку КСС через аналоговый AHA или цифровой DIG интерфейсы соответственно. Эти интерфейсы являются четырехпроводными, первый из них соответствует Рекомендации ITU‑T Q.553, а второй - Рекомендации ITU-T G.703.
Структурная схема обеспечения служебной телефонной связи с использованием блока КСС показана на рис. 7.27. Блок КСС имеет три типа интерфейсов: OWD, AHA и DIG. Для подключения к линейному регенератору блока КСС используется два интерфейса OWD: один для подключения к одному, например, западному направлению – OWD1, а второй - для подключения к противоположному, т. е. к восточному направлению - OWD2. Для подключения в пункте доступа, оборудованном мультиплексором типа ТМ-2500, в блоке КСС используется только один интерфейс (OWD1 или OWD2).
Байт Е1, размещенный в заголовке RSOH, может быть доступен в пункте линейного регенератора и в пункте доступа, оборудованном мультиплексором типа ТМ-2500. Интерфейсы AHA и DIG дублированы.
Структурная схема блока КСС показана на рис. 7.28. Рассмотрим кратко прохождение сигналов между различными интерфейсами блока по этой схеме.

Рис. 7.27

Рис. 7.28
Речевой сигнал, передаваемый с телефонного аппарата ATА, через интерфейс Q.553 IF поступает в схему кодера, где он методом ИКМ по A-закону преобразуется в последовательность байтов E1 в коде NRZ. С выхода кодера байты подаются в устройство цифровых телефонных сигналов DSP, в котором они обрабатываются. Обработанные сигналы через интерфейс DSP IF устройства DSP выдаются на интерфейсы OWD1 ТХ и OWD2 ТХ, откуда они вводятся в заголовок RSOH.
Принимаемая последовательность байтов Е1 канала служебной телефонной связи с интерфейсов OWD1 RX и OWD2 RX через интерфейс DSP IF поступает в устройство DSP, где обрабатывается. Обработанная последовательность байтов в сопровождении сигналов синхронизации передается на вход декодера, осуществляющего цифро-аналоговое преобразование поступивших сигналов. На выходе декодера получается принятый речевой сигнал, который через интерфейс Q.553 IF поступает на вход телефонного аппарата AТА.
Если для ведения служебной телефонной связи используется ЦТА, то аналого-цифровое преобразование передаваемых речевых сигналов осуществляется в нем, а полученная при этом байт-последовательность поступает в устройство преобразования кода и синхронизации E1-PLD через сонаправленный интерфейс G.703 IF. Здесь принятый от ЦТА цифровой сигнал в квазитроичном коде со скоростью передачи 256 кбит/с (см. подразд. 2.4.5, рис. 2.45) синхронизируется сигналом частотой 256 кГц, а затем преобразуется в двоичный сигнал в коде NRZ и считывается со скоростью передачи 64 кбит/с. Этот сигнал через интерфейсы DSP IF устройств E1-PLD и DSP выдается на интерфейсы OWD1 ТХ и OWD2 ТХ, откуда он вводится в заголовок RSOH.
Принимаемая последовательность байтов E1 канала служебной телефонной связи с интерфейсов OWD1 RX и OWD2 RX через интерфейсы DSP IF поступает в устройство E1‑PLD. Здесь происходит обратное преобразование сигнала из кода NRZ со скоростью передачи 64 кбит/с в квазитроичный код со скоростью передачи 256 кбит/с, чтобы этот сигнал по сонаправленному интерфейсу G.703 IF передать к аппарату ЦТА. В нем полученный цифровой сигнал преобразуется в принятый речевой сигнал.
На схеме показано также прохождение цифровых сигналов канала передачи данных с использованием байта F1.
Вся обработка сигналов в трактах передачи и приема каналов служебной телефонной связи и канала передачи данных выполняется под непрерывным контролем и управлением процессора UP блока КСС. Большинство функций процессор выполняет по требованию блока управления SU, с которым процессор имеет соединение (канал связи) через интерфейс ISO 8482.
Конструктивно блок КСС представляет собой печатную плату, все компоненты (детали) которых монтируются с одной стороны. На передней панели блока имеется два светодиода: зеленый (питание включено) и красный (аварийная индикация блока КСС).
Список литературы
Акопов С. Г. Волокно MetroCor - будущее городской и зоновой оптической связи // Вестник связи. - 2002. - № 10. - с. 62-65.
Александровский М. И. и др. Метод оптимизации характеристик волоконно-оптических систем передачи с использованием новых технологий // Электросвязь. - 2002. - № 4. - с. 26-28.
Алексеев Е. Б. и др. Концепция развития высокоскоростных ВОСП на взаимоувязанной сети связи России // Электросвязь. - 1996. - № 9. - с. 7-9.
Алексеев Е. Б. Концепция технической эксплуатации волоконно-оптических систем передачи // Электросвязь. - 1998. - № 1. - с. 21-24.
Алленков О. М. Технология GMPLS: универсальная многопротокольная коммутация меток // Вестник связи. - 2002. - № 8. - с. 28-37.
Алленков О. М. Технология GMPLS: методы защиты и восстановления // Вестник связи. - 2002. - № 9. - с. 72-78.
Бакланов И. Г. Технологии измерения в современных телекоммуникациях. - М.: Эко-Трендз, 1998. - 140 с.
Бакланов И. Г. Современный рынок измерительной техники: состояние, тенденции и решения // Вестник связи. - 2000. - № 8. - с. 21-24.
Бакланов И. Г., Сондак С. Ю. Концепция «мягкого TMN» и роль измерительной техники в системах управления // Вестник связи. - 2002.-№8. - с. 46-48.
Баркова И В., Сергеева Т.П. Математические модели оценки надежности кольцевых структур в сетях SDH // Электросвязь. - 2001. -№ 11. - с. 36-38.
Барсков А. Г. Симбиоз науки и бизнеса - успех на рынке // Сети и системы связи. - 1999. - № 16 (50). - с. 40-41.
Барсков А. Г. SDH: от восхода до заката // Сети и системы связи. - 2000. - №10 (60). - с. 84-87.
Барсков А. Г. Анализаторы SDH идут в массы // Сети и системы связи. - 2001. - № 5 (69). - с. 64-70.
Барсков А. Г. Технологии больших городов // Сети и системы связи. - 2002. - № 6 (84). - с. 80-85.
Берлин Б. 3. и др. Волоконно-оптические системы связи на ГТС: Справочник. - М.: Радио и связь, 1994. - 172 с.
Брукбек П. и др. Высокоскоростные сети связи будущего // Электросвязь. - 1995. - № 10. - с. 45-47.
Быковский В. А. и др. Волоконно-оптическая синхронная сеть «Макомнет» // Волоконно-оптическая техника. - 1996. - Вып. 6. - С. 3 - 8.
Василевский А. М. и др. Оптическая электроника. - Л.: Энергоатомиздат, 1990. - 176 с.
Воронцов А. С, Питерских С. Э. Характеристики и методы испытаний оптических волокон и кабелей. Анализ рекомендаций МСЭ-Т // Электросвязь. - 2002. - № 4. - с. 22-25.
Гнелецкий А. А. и др. Система синхронной передачи (SDH) в Днепропетровске // Зв'язок. - 1997. - № 1 (7). - с. 37-39.
Голь В. Д., Хмелъов К. П. Волоконно-оптичні системи передавання типу «Сопка-3М» та П-336: Навч. посіб. - К.: КВІУЗ, 1999. - 80 с.
Голышко А. В., Дронов Д. В. Мультисервисное решение для московского пользователя // Электросвязь. - 1999. - № 4. - с. 40-43.
Голышко А. В. и др. Динамика транспортной сети // Вестник связи. -2001.-№11. - с. 46-50.
Гордеев Э. Н. Новые технологии в системах управления сетями связи // Вестник связи. - 2000. - № 1. - с. 29-32; № 2. - с. 79-83.
Гордон Г. И. и др. Солитонные волоконно-оптические системы передачи // Электросвязь. - 1992. - № 12. - с. 14-17; 1993. - № 2. - с. 11-13.
Гроднев И. И., Верник С. М. Линии связи: Учеб. для высш. учебн. заведений. - М.: Радио и связь, 1988. - 544 с.
Даурцев И. А. и др. Волоконно-оптические системы передачи с полупроводниковыми оптическими усилителями // Электросвязь. - 1992. - №5. - с. 34-35.
Дегтярев В. В. и др. Сеть синхронной цифровой иерархии в Санкт-Петербурге // Электросвязь. - 1995. - № 5. - с. 12-14.
Дж. Гауэр. Оптические системы связи: Пер. с англ. / Под ред. А. И. Ларкина. - М.: Радио и связь, 1989. - 502 с.
Диденко В. С. «Укртек» - пять лет // Networks - Сети. - 1998. - № 1. - с. 52-53.
Дональд Дж. Стерлинг, младший. Техническое руководство по волоконной оптике: Пер. с англ. / Под ред. М. Кузьмина. - Изд-во «ЛОРИ», 1998. - 288с.
Ефремов В. Л. Перспективы создания глобальной сети связи по проекту OXYGEN // Перспективи розвитку первинно! мережі зв'язку України: Матеріали Ювілейної міжнар. наук.-практичн. конф. (Київ, 15 - 18 грудня 1998 р.), 1999. - 148 с.
Зеленяк-Кудрейко И. В., Костомаров Н. В. Системы SDH третьего поколения Millennia (Lucent Technologies) // Электросвязь. - 1997. - № 11. - с. 44-45.
Зурман А. Р. Практика проектирования сетей с оборудованием синхронной цифровой иерархии // Электросвязь. - 1997. - №1. - с. 11-13.
3юзин Н. А., Паршин В. А. Синхронная цифровая иерархия и ее применение на сетях связи. - СПб.: ВАС, 1998. - 80 с.
Иванов П. Управление сетями связи. Ч. 1 // Сети Network World. - 1999. - № 8-9. - с. 118-126.
Иванов П. Горизонты оптических сетей // Сети Network World. - 2000. - №12. - с. 34-41.
Иванов Ю. П. и др. Цифровые системы передачи производства НПП «Новел - ИЛ» // Электросвязь. - 2000. - № 1. - с. 2-6.
Іщенко С. В. Оптичні підсилювачі на основі легованих ербієм оптичних волокон // Зв'язок. - 1997. - № 3. - с. 24-27; № 4. - с. 30-32.
Ким Л. Т. Синхронная цифровая иерархия // Электросвязь. - 1991. - №3. - с. 2-5.
Ким Л. Т. Линейные тракты синхронной цифровой иерархии // Электросвязь. - 1991. - № 6. - с. 5-8.
Ким Л. Т. Синхронные, асинхронные и плезиохронные системы передачи // Электросвязь. - 1998. - № 1. - с. 17-20.
Ким Л. Т. Нововведения в синхронной цифровой иерархии // Электросвязь. - 2001. - № 5. - с. 31-32.
Киреев В. И., Шмытинский В. В. Первая региональная сеть синхронной цифровой иерархии в России // Электросвязь. - 1995. - № 8. - с. 21-23.
Кугушев А. И. и др. Способы и устройства ввода излучения инжекционных полупроводниковых лазеров в одномодовые волоконные световоды // Зарубежн. радиоэлектроника. - 1990. - № 11. - с. 52-55.
Крупнов А. Е., Соколов Н. А. Новые телекоммуникационные технологии в отрасли связи//Электросвязь. - 1995. - №11. - с. 2-5.
Компания Alcatel для Черноморской кабельной сети // Электросвязь. - 1999. - № 2. - с. 44.
Лебедев С. Ф. и др. Регенератор сигнала NRZ-R на скорость передачи 668 Мбит/с // Электросвязь. - 1992. - № 5. - с. 22-23.
Лукин И. А. и др. Комплекс аппаратуры пятеричной волоконно-оптической системы передачи // Электросвязь. - 1992. - № 5. - с. 17-18.
Макаров Т. В. Ввод лазерного излучения в одномодовые оптические волокна//Электросвязь. - 1995. - № 11. - с. 19-21.
Макаров Т. В., Зазулин А. Е. Градиентный анизотропный волоконный световод // Сборник научи, трудов учебн. заведений связи «Волоконно-оптические функциональные устройства в системах обработки и передачи информации». - 1991. - Вып. 153. -40 с.
Маккавеев В. И. Проектирование цифровых волоконно-оптических систем передачи с оптическими усилителями // Электросвязь. - 1995. - №7. - с. 18-20.
Марголин С. Автоматизированные системы технической эксплуатации // Электросвязь. - 1998. - № 1. - с. 40-41; № 3. - с. 36-37.
Меккелъ А. М. Пути эволюции транспортных сетей связи // Труды Международной академии связи. - 1997. - №4. - с. 9-10.
Метрологическое обеспечение систем передачи: Учебн. пособ. Для высш. учебн. заведений / Под ред. проф. Б. П. Хромого. - М.: Радио и связь, 1991. - 392 с.
Мини-SDH - максимум эффективности // Электросвязь. - 2001. - № 2. - с. 49.
Мурадян А. Г. и др. Оптические кабели многоканальных линий связи. - М.: Радио и связь, 1991. - 200 с.
Назаров А. Н., Симонов М. В. ATM: технология высокоскоростных сетей. - М.: Эко-Трендз, 1997. - 232 с.
Нетес В. А. Построение транспортных сетей на основе синхронной цифровой иерархии // Сети и системы связи. - 1997. - № 4. - с. 72-78.
Нетес В. А. Надежность сетей связи: тенденции последнего десятилетия // Электросвязь. - 1998. - № 1. - с. 25-27.
Нетес В. А. Новые возможности аппаратуры SDH // Вестник связи. - 1999. - № 9. - с. 47-51.
Нетес В. А., Трубникова Н. В. Управление сетями: стандарты, проблемы и перспективы // Вестник связи. - 2000. - № 2. - с. 83-88.
Нетес В. А. Оборудование SDH следующего поколения // Вестник связи. - 2002. - № 10. - с. 32-38.
Никольский К. К. Кабели и аксессуары на выставке «Связь - Экспокомм' 2000» // Электросвязь. - 2000. - № 7. - с. 9-10.
Носов Ю. Р. 30-летие волоконно-оптической связи. К истории зарождения и развития // Электросвязь. - 2001. - № 1. - с. 40-43.
Павлов И. Н. Оптические транспортные сети SDH на базе оборудования MADM // Сети и системы связи. - 2002. - № 1 (79). - с. 70-75.
Полунин А. Сегодня и завтра оптической связи // Сети. - 2002. - № 7 (120). - с. 22‑25.
Попов С. А. Будущее транспортных сетей // Вестник связи. - 2002. - №2. - с. 17-18.
Рудов Ю. К. и др. Аппаратура междугородных цифровых систем передачи нового поколения // Электросвязь. - 1996. - № 3. - с. 12-14.
Руководящий технический материал по применению систем и аппаратуры синхронной цифровой иерархии на сети связи РФ. - М.: ЦНИИС, 1994. - 50 с.
Свинцов А. Г. Измерение параметров волоконно-оптического тракта // Вестник связи. - 2002. - № 8. - с. 49-52.
Седых Д. А., Свинцов А. Г. Измерительное оборудование для монтажа и эксплуатации ВОЛС // Вестник связи. - 2000. - №10. - с. 91-95.
Сергеева Т. П., Баркова И. В. Оптимизация структуры сети взаимосвязанных колец // Электросвязь. - 2002. - № 8. - с. 10-12.
Синев С. Г., Корольков А. В. Перспективы развития волоконно-оптических сетей связи. 22-я Европейская конференция по оптической связи // Электросвязь. - 1997. - № 12. - с. 25-28.
Системы передачи. Проспект производимой аппаратуры компании AT&T, 1992. - 16 с.
Скляров О. К. Современные волоконно-оптические системы передачи, аппаратура и элементы. - М.: СОЛОН-Р, 2001. - 237 с.
Слепов Н. Н. Синхронные цифровые сети SDH. - М.: Эко-Трендз, 1997. - 148 с.
Слепов Н. Н. Оптическое мультиплексирование с разделением по длине волны // Сети. - апрель 1999. - с. 24-31.
Слепов Н. Н. Солитонные сети // Сети. - март 1999. - с. 90-100.
Убайдуллаев Р. Р. Волоконно-оптические сети. - М.: Эко-Трендз, 1998. - 267 с.
Удовиченко В. Н., Шумаев В. В. Применение полупроводниковых лазерных усилителей в линейных трактах ВОСП // Электросвязь. - 1996. - №3. - с. 15-18.
Хан Н. Оборудование и системы синхронной цифровой иерархии (SDH) фирмы Philips // Электросвязь. - 1994. - № 2. - с. 44-45.
Хмелев К. Ф., Волков А. В. Цифровые системы передачи. - К.: Полифаст, 1996. - 144 с.
Хмелев К. Ф. Взгляд из будущего, или цифровые технологии в современных оптических сетях // Сети и бизнес. - 2001. - № 1. - с. 22-25.
Хмелев К. Ф. PDH и SDH - побеждает сильнейший // Сети и бизнес. - 2001. - №1 - с. 26-33.
Хмелев К Ф. Возникновение и развитие технологии SDH // Сети и телекоммуникации. - 2001. - № 5-6 (19). - с. 74-79.
Хмелев К. Ф. Применение технологии SDH в Украине // Сети и телекоммуникации. - 2002. - № 1 (20). - с. 70-76.
Хмелев К. Ф. SDH - очередной этап развития цифровых технологий // Сети и телекоммуникации. - 2002. - № 2 (21). - с. 72-77.
Хмелев К. Ф. Основное оборудование SDH: состав и возможности // Сети и телекоммуникации. - 2002. - № 3 (22). - с. 72-79.
Хмелев К. Ф. Структура сигналов в системах передачи SDH // Сети и телекоммуникации. - 2002. - № 4 (23). - с. 68-73.
Хмелев К. Ф. Построение циклов передачи синхронных транспортных модулей // Сети и телекоммуникации. - 2002. - № 5 (24). - с. 74-79.
Хмелев К. Ф. Построение мультиплексоров SDH // Сети и телекоммуникации. - 2002. - № 6 (25). - с. 72-78.
Хмелев К. Ф. Построение синхронных линейных трактов //Сети и телекоммуникации. - 2002. - № 7 (26). - с. 74-79.
Хмелев К. Ф. Оптические волокна линейных трактов SDH // Сети и телекоммуникации. - 2002. - № 8 (27). - с. 71-79.
Ходков В. А., Ходков К. A. SDH и PDH. История одного противостояния // Сети и телекоммуникации. - 1999. - № 1 (7). - с. 50-55.
Чепурин И. Н. Магистрали микронных размеров // Сети и системы связи. - 2001. - № 1 (65). - с. 30-39.
Черемискин И. В., Чехлова Т. К. Волноводные оптические системы спектрального мультиплексирования/демультиплексирования // Электросвязь. - 2000. - № 2. - с. 23-30.
Шарле Д. Л. Оптические кабели на выставке «Связь - Экспокомм' 97» // Электросвязь. - 1997. - № 11. - с. 21-27.
Шарле Д. Л. Оптические волокна на выставке «Связь - Экспокомм' 99» // Электросвязь. - 1999. - № 12. - с. 34-37.
Шарле Д. Л. Картинки с выставки // Электросвязь. - 2000. - № 1. - с. 44-46.
Шарле Д. Л. Поколения океанских оптических кабелей // Электросвязь. - 2002. - № 5. - с. 46-47.
Шаронин С. Г. Возможности современных рефлектометров // Вестник связи. - 2000. - № 8. - с. 25-27.
Шаршаков A. WDM: успехи и проблемы // Сети. - апрель 1999. - с. 14-22.
Шереметьев А. Г. Когерентная волоконно-оптическая связь. - М.: Радио и связь, 1991. - 192 с.
Широкополосные мультисервисные сети - новая платформа телекоммуникационных магистралей и услуг: Аналитический обзор. - К.: Нора-принт, 1999. - 134 с.
Щеглюк С. В. и др. Методы модернизации транспортных оптических сетей // Электросвязь. - 2002. - № 2. - с. 43-44.
ALCATEL создает трансатлантическую волоконно-оптическую сеть // Электросвязь. - 2001. - № 2. - с. 51.
Concise introduction to SDH. - AT&T, 1990. - 124 с.
ECI Telecom. XDM™ - интеллектуальная масштабируемая оптическая сетевая платформа: Общее описание // Lightscape Networks Ltd.. - март 2001. - Вып. 2. - 198 с.
ERICSSON: Система мультиплексирования SDH типа AXD-2500. - Вып. R 4.0: Инструкция по эксплуатации. - ч. 1, 2, 1996.
ISO 8073/AD2. Information Processing Systems - Open Systems Interconnection - Connection Oriented Transport Protocol Specification -Addendum 2: Class 4 Operation over Connectionless Network Service (1989).
ISO 8473. Information Processing Systems - Data Communications - Protocol for Providing the Connectionless-Mode Network Service (1988).
ISO 8648. Data Communications - Internal Organization of the Network Layer (1988).
ISO 9542. Telecommunications and Information Exchange between Systems - End System to Intermediate System Routing Exchange Protocol for Use in Conjunction with the Protocol for Providing the Connectionless-Mode Network Service (1988).
ISO 9595. Information Processing Systems - Open Systems Interconnection - Common Management Information Service Definition (CMIS) (1992).
ISO 9596. Information Processing Systems - Open Systems Interconnection - Common Management Information Protocol Specification (CMIP) (1992).
ISO 10589. Telecommunications and Information Exchange between Systems - Intermediate System to Intermediate System Intra-Domain Routing Information Exchange Protocol (1992).
ITU-T Recommendation G.650T. Definition and Test Methods for the Relevant Parameters of Single-Mode Fibres (2000).
ITU-T Recommendation G.652. Characteristics of a Single-Mode Optical Fibre Cable (2000).
ITU-T Recommendation G.653. Characteristics of a Dispersion-shifted Single-Mode Optical Fibre Cable (2000).
ITU-T Recommendation G.654. Characteristics of a 1550 nm Wavelength Loss-minimized Single-Mode Optical Fibre Cable (2000).
ITU-T Recommendation G.655. Characteristics of a Non-Zero Dispersion Single-Mode Optical Fibre Cable (2000).
ITU-T Recommendation G.702. Digital Hierarchy Bit Rates (1988).
ITU-T Recommendation G.703. Physical/Electrical Characteristics of Hierarchical Digital Interfaces (1991).
ITU-T Recommendation G.704. Synchronous Frame Structures Used at Primary and Secondary Hierarchical Levels (1995).
ITU-T Recommendation G.707/Y.1322. Network Node Interface for the Synchronous Digital Hierarchy (SDH) (10/2000).
ITU-T Recommendation G.709. Synchronous Multiplexing Structure (1996).
ITU-T Recommendation G.774. Synchronous Digital Hierarchy (SDH) Management Information Model for the Network Element View (1996).
ITU-T Recommendation G.774.1. Synchronous Digital Hierarchy (SDH) Performance Monitoring for the Network Element View (1996).
ITU-T Recommendation G.774.2. Synchronous Digital Hierarchy (SDH) Configuration of the Payload Structure for the Network Element View (1996).
ITU-T Recommendation G.11 4.3. Synchronous Digital Hierarchy (SDH) Management of the Multiplex-section Protection for the Network Element View (1996).
ITU-T Recommendation G.774.4. Synchronous Digital Hierarchy (SDH) Management of the Subnetwork Connection Protection for the Network Element View (1996).
ITU-T Recommendation G.774.7. Synchronous Digital Hierarchy (SDH) - G.774 Implementeds Guide (1996).
ITU-T Recommendation G.780. Vocabulary of Terms for Synchronous Digital Hierarchy (SDH) Networks and Equipment (1994).
ITU-T Recommendation G.781. Structure of Recommendations on Equipment for the Synchronous Digital Hierarchy (SDH) (1994).
ITU-T Recommendation G.782. Types and General Characteristics of Synchronous Digital Hierarchy (SDH) Equipment (1994).
ITU-T Recommendation G.783. Characteristics of Synchronous Digital Hierarchy (SDH) Multiplexing Equipment (1994).
ITU-T Recommendation G.784. Synchronous Digital Hierarchy (SDH) Management (Requirements of Multiplexer Equipment) (1994).
ITU-T Recommendation G.785. Characteristics of a Flexible Multiplexer in a Synchronous Digital Equipment (1996).
ITU Т Recommendation G.803. Architectures of the Transport Networks Based on the Synchronous Digital Hierarchy (SDH) (1997).
ITU-T Recommendation G.811. Timing Requirements at the Outputs of Primary Reference Clocks Suitable for Plesiochronous Operation of International Digital Links (1997).
ITU-T Recommendation G.812. Timing Requirements at the Outputs of Slave Clocks Suitable for Plesiochronous Operation of International Digital Links (1988).
ITU-T Recommendation G.813. Timing Characteristics of SDH Equipment Slave Clocks (SEC) (1996).
ITU-T Recommendation G.825. The Control of Jitter and Wander within Digital Networks Which are Based on the Synchronous Digital Hierarchy (SDH) (1993).
ITU-T Recommendation G.826. Errors Performance Parameters and Objectives for International, Constant Bit Rate Digital Paths at or above the Primary Rate (1993).
ITU-T Recommendation G.957. Optical Interfaces for Equipments and System Relating to the Synchronous Digital Hierarchy (SDH) (1999).
ITU-T Recommendation G.958. Digital Line Systems Based on the Synchronous Digital Hierarchy (SDH) for Use on Optical Fibre Cables (1994).
ITU-T Recommendation M.20. Maintenance Phylosophy for Telecommunications Networks (1992).
ITU-T Recommendation M.2101. Performance limits for bringing-into-service and maintenance of international SDH paths and multiplex sections (1997).
ITU-T Recommendation M.2110. Bringing-into-service of international PDH paths, sections and transmission systems and SDH paths and multiplex sections (1997).
ITU-T Recommendation M.2120. PDH path, section and transmission system and SDH path and multiplex section fault detection and localization procedures (1997).
ITU-T Recommendation M.3010. Principles for a Telecommunications Management Network (1992).
ITU-T Recommendation M.3100. Generic Network Information Model (1995).
ITU-T Recommendation M.3300. TMN Management Facilities Presented at the F Interface (1992).
ITU-T Recommendation X.85/Y.I32I. IP over SDH using LAPS (02/2001).
ITU-T Recommendation X.2I4. Information Technology - Open Systems Interconnection - Transport Service Definition (1993).
ITU-T Recommendation X.215. Information Technology - Open Systems Interconnection - Session Service Definition (1994).
ITU-T Recommendation X.224. Protocol for Providing the OSI Connection-mode Transport Service (1993).
ITU-T Recommendation X.225. Information Technology - Open Systems Interconnection - Connection-oriented Session Protocol: Protocol Specification (1994).
ITU-T Recommendation X.226. Information Technology - Open Systems Interconnection - Connection-oriented Presentation Protocol: Protocol Specification (1994).
ITU-T Recommendation X.229. Remote Operations: Protocol Specification (1988).
Lightwave Test and Measurement Catalog 2000. Agilent Technologies. - 172 c.
NOKIA Telecommunications: Узел коммутации STM-1/STM-4 системы SYNFONET // Электросвязь. - 1996. - № 10. - с. 42-44.
Northern Telecom: Fiber World TN-1X. Product Handbook, Issue 3 June, 1995.
OLC/ISM/I-2000 System Information. AT&T, 1991. - 48 c.
SDH Basic Seminar // Wandel & Golterman. - april 1995. - 97 c.
SDH (Синхронная цифровая иерархия) SMS-600. Система передачи STM-4. NEC (Япония), 1996. - 8 с.
SDH. Test and Measurement Techniques. Wandel & Golterman, 1994. - 16 c.
SDH. Innovative Network Solutions. Lucent Technologies, 1996. - 13 c.
Siemens: Основные направления деятельности департамента сетей связи общего пользования // Электросвязь. - 1997. - № 7. - с. 46-47.
Siemens: Technical Description TransXpress Infinity MTS2, Issue 03. - 10 October 2002. - 148 p.