

4.Задания, приложение, библ
.docстроительной механики
При выполнении динамических расчётов систем с конечным чис-лом степеней свободы масс по уравнениям, записанным для заданной системы, которая, может быть любой – континуальной, пластинчато-оболочечной, стержневой или комбинированной, приходится рассчи-тывать её на действие единичных сил инерции и амплитуд заданных воздействий с определением возникающих от них перемещений или реакций по направлениям степеней свободы масс. В настоящее время это не является проблемой – современные программные средства позволяют с помощью компьютеров рассчитывать конструкции любой сложности эффективными численными методами (методом конечных элементов и др.). Для статически неопределимых стержневых систем сохраняют актуальность классические методы расчёта – сил, переме-щений и смешанный. Их применение в решении задач динамики воз-можно в двух вариантах:
в качестве вспомогательного средства, играющего сугубо техничес-кую роль в расчёте по уравнениям ( 1.16 ) или ( 1.26) на стадии вычисле-ния компонентов матриц упругой податливости или жёсткости r за-данной системы и перемещений в ней P или реакций RP от амплитуд заданных воздействий;
с объединением основных неизвестных метода и «главных» неизвест-ных динамического расчёта – сил инерции или перемещений масс – в общий вектор и формированием для его определения уравнений, отно-сящихся уже не к заданной системе, а к основной системе выбранного метода.
Второй вариант не имеет никаких преимуществ в сравнении с пер-вым, а при использовании компьютерных программ даже менее удо-бен. Но, представляя определённый теоретический интерес, он, кроме того, в расчётах «вручную» систем с небольшим числом степеней сво-боды и невысокими степенями статической и кинематической неопре-делимости может быть привлекательным тем, что позволяет заменить n +1 - кратное решение системы канонических уравнений используемого классического метода при расчётах на единичные силы инерции и амп-литуды заданных воздействий (как того требует первый вариант) лишь одним решением общей системы уравнений более высокого порядка (хотя объективно это не дает выигрыша в трудоёмкости).
Рассмотрим решение задачи об
установившихся гармонических
вынужденных
колебаниях
консервативной
системы с
конечным числом
степеней свободы 1![]() n <
n <
![]() при вибрационных силовых и
кинемати-ческих воздействиях. Исходные
предпосылки – те же, что в
п. 1.5.5
( см.
с. 70 ). Для
раскрытия статической неопределимости
заданной системы используем самый
общий из классических методов –
смешанный.
при вибрационных силовых и
кинемати-ческих воздействиях. Исходные
предпосылки – те же, что в
п. 1.5.5
( см.
с. 70 ). Для
раскрытия статической неопределимости
заданной системы используем самый
общий из классических методов –
смешанный.
Как будет показано далее, из полученных уравнений формальным образом затем могут быть выведены уравнения для собственных колебаний, а также для основных систем других методов расчёта статически неопределимых систем.
Применяя кинетостатический метод
динамики, считаем систему находящейся
в равновесии при амплитудном отклонении
от исходного условно недеформированного
состояния. В указанном расчётном
поло-жении своих амплитудных значений
достигают, наряду с силами инер-ции масс
и их перемещениями, также и реакции
связей, в том числе лишних,
и перемещения
всех точек
системы, включая
узлы. За основные
неизвестные задачи принимаем амплитуды
инерционных силовых фак-торов J,
реакций некоторых лишних связей Х
и перемещений узлов Z
– объединяем их в общий вектор Y
= [ J
т X
т Z
т ]
т. Общее число основных
неизвестных n0
= n
+ nX
+ nZ
, где
nX
![]() nst
и nZ
nst
и nZ
![]() nк
–
количества неиз-вестных X
и Z соответственно;
nst
и nк – степени
статической и кинема-тической
неопределимости заданной системы.
nк
–
количества неиз-вестных X
и Z соответственно;
nst
и nк – степени
статической и кинема-тической
неопределимости заданной системы.
Применяя сквозную нумерацию основных неизвестных, имеем
Y = [ J1
J2 ... Jn
![]()
J1
y3
![]()
у
Jn
–
1


з
J3
yn
–
1
y1













![]()
![]()
с
J2
Jn








 заданием этим дополни-
заданием этим дополни-
т F





 ельным
связям перемеще-
ельным
связям перемеще-
н
yn
y2 q


Ji
yk
yi












 Описанный переход
Описанный переход
о
y*
=в
Jk M






с

 истеме
обеспечивает
неиз-
истеме
обеспечивает
неиз-
м
Xn
+
1












![]()
ф
J
*

 ормированного
состоя-
ормированного
состоя-
н
Xn
+
2
Рис. П.1
направлениям инерцион-
ных силовых факторов J1 , J2 ,..., Jn в основной системе – такие же, как в заданной системе ( истинные ): y0, i = yi , i = 1, 2, ..., n; ( П.1 )
Здесь
и далее нижний индекс «0»
в обозначениях переме-щений y0,
i
и
0,
i
указывает
на то, что они определяются в основной
системе.
лениям удаленных абсолютно жёстких лиш-
них связей равны нулю:
0, i = 0, i = n + 1, n + 2, ..., n + nX ; ( П.2 )
реакции дополнительных связей, наложенных на узлы, равны нулю:
Ri = 0, i = n + nX + 1, n + nX + 2, ..., n0 . ( П.3 )
Уравнения ( П.1 ) – ( П.3 ) выражают условия эквивалентности НДС двух систем – основной смешанного метода и заданной. Представляя их левые части по принципу суперпозиции как суммы составляющих от основных неизвестных J, X, Z и амплитуд заданных воздействий, согласно рис. П.1, получаем:
y
i =1, ..., n
;![]()
![]()
 0,
i=
yi
,
0,
i=
yi
,
i =
n
+
1, ..., n
+
nX
;![]()
![]()
 0,
i=
0 ,
0,
i=
0 ,
i = n
+
nX
+
1, ..., n0![]() +
+![]() +
+ +
Ri=
0,
+
Ri=
0,
или, заменяя величины, стоящие под знаками сумм, произведениями единичных перемещений и реакций на соответствующие неизвестные Jk , Xk и Zk :
![]()

![]()
 0,
i
= yi
, i
= 1,
..., n
;
0,
i
= yi
, i
= 1,
..., n
;
![]()
![]()
 0,
i
=
0,
i
= n
+1,
...,
n
+
nX
;
(
П.4)
0,
i
=
0,
i
= n
+1,
...,
n
+
nX
;
(
П.4)
![]()
![]()
 Ri
= 0, i
= n
+ nX
+ 1,
..., n0.
Ri
= 0, i
= n
+ nX
+ 1,
..., n0.
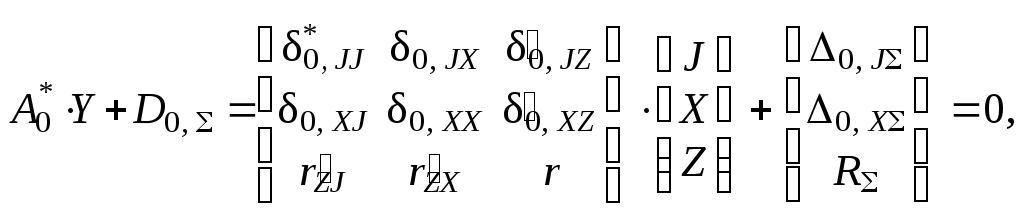
Выразив yi ( i = 1, 2, ..., n ) через Ji по ( 1.81 ), получим основные уравнения установившихся вынужденных колебаний, записанные для основной системы смешанного метода в канонической форме:
 ( П.5
)
( П.5
)
г
. .
. . . . . . . . . . . . . .
![]() =
0,
ii –
1/(
=
0,
ii –
1/(![]() )
=
0,
ii –
F
/a
i
.
)
=
0,
ii –
F
/a
i
.![]() =
0,
JJ –
F
a –1
= 0,
JJ – (
m0
=
0,
JJ –
F
a –1
= 0,
JJ – (
m0![]() )
–1 a
–1 =
)
–1 a
–1 =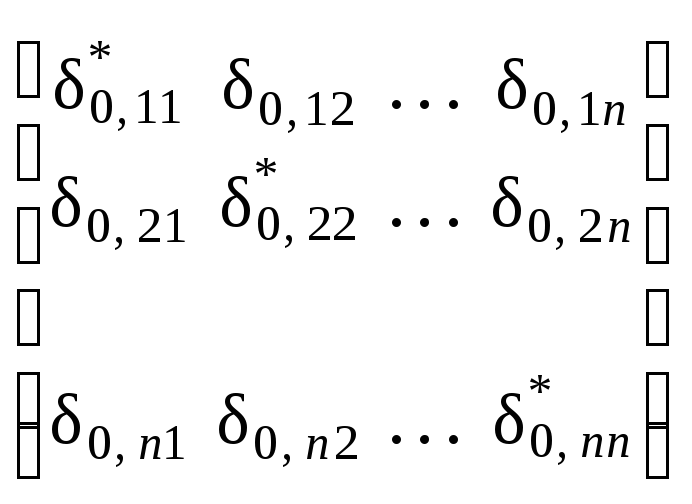 ;
;
Смысл блоков матрицы коэффициентов
![]() и
вектора свободных членов D0,
уравнений ( П.5 ) расшифровывает
следующая таблица:
и
вектора свободных членов D0,
уравнений ( П.5 ) расшифровывает
следующая таблица:
|
Сущность величин, являющихся компонентами блока |
От каких воздействий возникают величины, являющиеся компонентами блока От единичных От единичных От единичных От амплитуд сил инерции реакций лишних перемещений заданных Jk = 1, связей Xk=1, узлов Zk = 1, воздействий k = 1, ..., n k = n+1, ... , k = n+nx+1, n+nx ..., no |
|
По направлени- ям сил инерции Пере- J1 , J2 , ..., Jn
меще- По направлени- ния в ям удаленных ОССМ лишних связей или их реакций Xn+1, Xn+2 , ..., Xn+nX
Реакции связей, введённых в узлы ОССМ |
|
Блоки матрицы
![]() подчиняются
условиям взаимности:
подчиняются
условиям взаимности:![]() ;
;
![]()
![]() а внутри диагональных блоков 0,
JJ ,
0,
XX
и r
: 0,
ik = 0,
ki
; rik
= rki
( i
а внутри диагональных блоков 0,
JJ ,
0,
XX
и r
: 0,
ik = 0,
ki
; rik
= rki
( i![]() k
).
k
).
Структура и размеры блоков таковы:
nn
)
nnX
) . .
. . . . . . . . . . . . . . . .
. . . . . . . . . . . . . .
 ;
;
nnZ
)
nX
n
) . .
. . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . .
 ;
;
nX
nX
)
nX
nZ
) . .
. . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . .
 ;
;
nZ
n
)
nZ
nX
) . .
. . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . ;
;
 ;
;
. .
. . . . . . . . . . . . . . . . . .
nZ
nZ
)
n
1
)
nX
1
) ;
;
nZ
1
)
Следует
обратить внимание на то,
что динами-
ческие поправки, содержащие
ко в n
диагональных членов блока
![]() ,
входят толь-
,
входят толь-
![]() .
.
Компоненты блоков 0,
JJ
,
![]() ,
0,
XX
, 0,
J
и 0,
X
опреде-
,
0,
XX
, 0,
J
и 0,
X
опреде-
ляются как перемещения – методом Максвелла – Мора или любыми дру-
гими методами, пригодными для рассматриваемой системы. Единич-
ные реакции
![]() –
компоненты блоков
–
компоненты блоков![]() ,
,
![]() – и Ri
из R
могут вычис-
– и Ri
из R
могут вычис-
ляться статическим и кинематическим способами, а rik в блоке r – также
и «перемножением» единичных эпюр.
Величины
![]() в блоках
в блоках
![]() и
и
![]() находятся из условия взаимности
находятся из условия взаимности
![]() .
Для вычисления на-
.
Для вычисления на-
званных компонентов матриц предварительно определяются в основ-ной системе силовые факторы S0, k ( k = 1, 2, ..., n0 ) от единичных оcнов-ных неизвестных и S0, – от амплитуд воздействий.
![]()
( П.6 )
( П.6 )
Очевидно,
что должно быть Det![]() .
Матрица
.
Матрица
![]() может
оказаться вырожденной
(
Det
может
оказаться вырожденной
(
Det![]() )
либо при
F
= (случай
резонанса),
либо
при вы-
)
либо при
F
= (случай
резонанса),
либо
при вы-
боре основной системы, не являющейся геометрически неизменяемой – в обоих
случаях должны быть внесены необходимые исправления.
По найденным J, X и Z далее вычисляются искомые амплитуды динамических силовых факторов:
Sdyn
=![]() +
+![]() +
+ +
S0,
(
П.7 )
+
S0,
(
П.7 )
после чего выполняются статическая и кинематическая проверки ре-зультатов расчёта ( напомним, что в смешанном методе обе они одина-ково важны ), причем в кинематической проверке контролируются и амплитуды динамических перемещений масс ( как в п. 1.5.5 – по ( 1.87 )), и перемещения по направлениям удаленных лишних связей в ОССМ
( вычисленные по правой части формулы ( 1.87 ) с Si и Rj,i от Xi = 1, они
должны быть равными нулю ).
Всё остальное – построение эпюр динамических усилий, опреде-ление расчётных усилий и т.д. – осуществляется так же, как в расчёте по уравнениям, относящимся к заданной системе ( п. 1.5.5 ).
Основные уравнения для задачи о собственных колебаниях, за-писанные для основной системы смешанного метода, легко получают-ся с помощью уравнений ( П.5 ) из следующих соображений: собствен-ные колебания происходят по гармоническому закону, как и рассмот-ренные выше установившиеся вынужденные, но с частотой , а не F . Поэтому, если на схеме ( рис. П.1 ) считать отсутствующими заданные нагрузки F, q, M и смещения связей , то полученная расчётная схема ОССМ будет относиться к случаю собственных колебаний. Она описы-вается уравнениями, формально вытекающими из ( П.5 ), если принять
0,
= 0 и заменить
![]() на
на
![]() ,
,
![]() на
на
![]() :
:
 ( П.8
)
( П.8
)
г
. .
. . . . . . . . . . . . . .
![]() =
0,
ii –
1/(
=
0,
ii –
1/(![]() )
=
0,
ii –
/a
i
.
)
=
0,
ii –
/a
i
.![]() =
0,
JJ –
a
–1 = 0,
JJ – (
m0
=
0,
JJ –
a
–1 = 0,
JJ – (
m0![]() )
–1 a
–1 =
)
–1 a
–1 = ;
;
Det (![]() )
= 0 . ( П.9 )
)
= 0 . ( П.9 )![]() 0:
0: