

tau lekcii 2006
.pdfТеория автоматического управления (лекции) п.п. all.doc |
1 |
РАЗДЕЛ 1.
Ведение. Основные понятия, термины и определения.
1.1. Технологический объект управления.
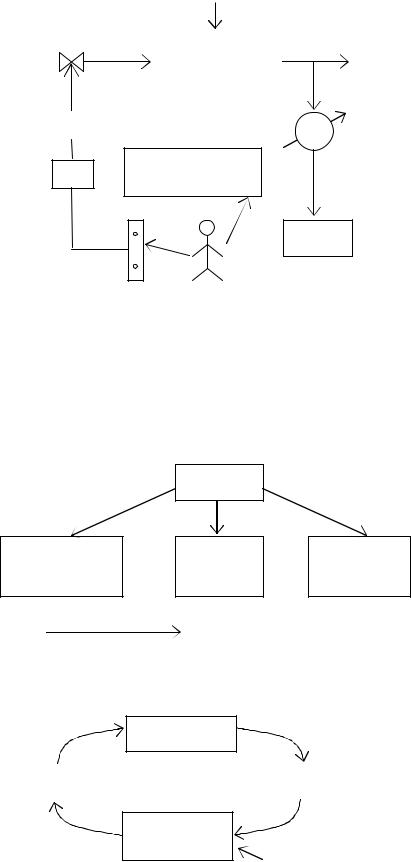
ТОУ – совокупность технологического оборудования и реализуемого на нем технологического действия
сырье энергия труд
|
|
|
|
|
|
|
|
|
|
ТОУ |
|
входная информация |
|
||||
|
|
|
|
|
|
|
|
|
|
|
выходная информация |
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
внутренняя информация |
готовый продукт |
|
|
Рис. 1 |
|
|||||
|
|
|
|
|
|
|
|
|
|
ν(t) - вектор внешних возмущающих воздействий |
|
||||||
|
|
|
(t)- вектор входящих |
|
|
|
|
|
|
||||||||
|
|
X |
|
|
|
|
|
|
|||||||||
|
параметров, который |
|
|
|
|
|
|
||||||||||
|
|
ТОУ |
|
Y1(t)- вектор выходных |
|||||||||||||
|
может использоваться |
|
параметров |
|
|||||||||||||
|
как регулирующее, |
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
||||||||||
|
управляющее |
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
Y1(t) - вектор параметров, характеризующих |
Рис. 2 |
|||||||
|
|
|
|
|
|
|
промежуточное состояние ТОУ (внутренняя информация) |
||||||||||
|
|
|
|
|
|
|
|
||||||||||
|
(t) = F1 [ |
|
|
(t), ν(t)] |
|
|
|
|
|
|
|||||||
Y |
X |
|
|
|
|
|
|
||||||||||
Y1(t) = F2 [ |
|
(t), ν(t)] |
|
|
|
|
|
|
|||||||||
X |
|
|
|
|
|
|
|||||||||||
1.2. Понятие об управлении.
Управление – совокупность действий на ТОУ, выбранных на основе информации и направленных на поддержание или улучшение функционирования технологического процесса.
Управляющее возмущение должно обеспечить достижение поставленных целей (критерия управления, целевой функции) при соблюдений технологических ограничений.
Разработка специальных технических средств позволяет осуществить автоматическое управление.
1.3. Системы управления, их виды.
Рис. 3 Система ручного (дистанционного) управления
|
ν(t) |
|
X(t) |
|
Y(t) |
|
ТОУ |
ручное |
|
управление |
|
|
|
|
ИМ |
|
ИУ |
|
|
информация |
Упр-щее воздейст.
ИУ – измерительное устройство ИМ – исполнительный механизм
Любая система управления имеет автоматический регулятор.
Теория автоматического управления (лекции) п.п. all.doc |
2 |
Рис. 4 Система автоматического управления (САУ)
|
|
|
|
ν(t) |
||
X(t) |
|
Y(t) |
||||
ТОУ |
||||||
|
|
|
|
|
||
|
|
|
|
|||
|
|
|
|
|
||
|
|
|
|
|
||
|
ИМ |
|
|
ИУ |
||
автоматическое ПУ  устройство (АУ)
устройство (АУ)
печать
АУ – автоматическое устройство для выработки управляющего воздействия ПУ – переключатель управления
САУ – система автоматического управления без участия человека (или с ограниченным участием)
Современными САУ с применением технических средств являются человеко-машинными системами, то есть человек – неотъемлемый элемент. Такие системы называются автоматизированными системами управления технологическими процессами (АСУТП).
Рис. 5 Виды Систем управления
СУ
Ручное дистанционное САУ АСУТП
управление
САУ |
технические |
автоматические регуляторы |
|
средства |
контроллеры (control – управление) |
||
|
Основная задача СУ формирование и осуществление целенаправленных воздействий на ТОУ.
ТОУ
исполнение |
|
информация |
|
|
|
принятие решений в зависимости от этой функции
определяется тип СУ
1.3.1. Понятие о системах автоматического управления (САУ).
ПРИМЕР САУ.
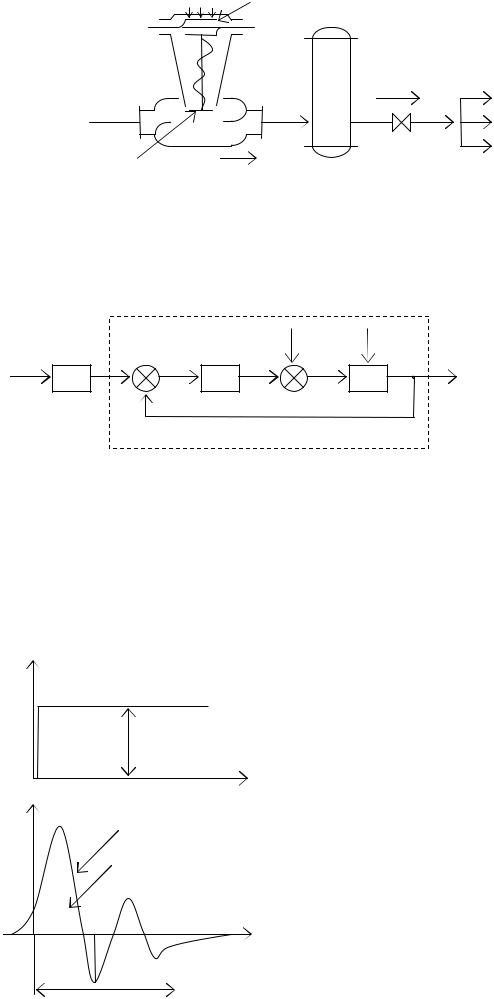
Ресивер – объем для сглаживания колебаний (газа)
Теория автоматического управления (лекции) п.п. all.doc |
3 |
мембрана
|
|
F↓ → Р↑ - клапан приоткрылся |
|
Р |
Fприток |
от |
|
|
|
к потребителю |
|
источника |
|
|
|
|
|
клапан |
Fприток |
|
|
расход |
|
В устойчивом состоянии Fпр = Fст
Ресивер – регулятор прямого воздействия (без участия человека)
1.3.2. Основные задачи синтеза и анализа САУ.
Структурная схема САУ.
|
|
|
|
λ(t) |
ν(t) |
f(t) |
U(t) |
ε(t) |
μ(t) |
x(t) |
y(t) |
УУ |
|
|
АР |
|
ТОУ |
АСР
УУ – устройство управления АР – автоматический регулятор
f(t) – заданная функция управляющего воздействия остальные параметры – см. расчетное задание с. 3.
Представленную САУ можно разбить на 2 уровня:
1. нижний уровень – АСР (автоматическая система регулирования) Её задача – устранение возмущений λ(t), ν(t) (внешние возмущения)
Для этого необходимо выбрать структуру регулятора (АР), алгоритм его функционирования и оптимально настроить.
λ(t) |
возмущение |
Критерий качества: |
|
|
||||||||||
|
|
|
|
|
|
|
tp |
|
|
|||||
|
|
|
|
|
|
|
I = ò |
|
y(t) |
|
dt → min |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
λ(t)=1 |
Ограничение: |
A1 − A3 |
|
|||||||
|
|
|
|
Степень затухания: Ψ = |
, |
|||||||||
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
t |
обычно 0.7 ≤ Ψ ≤ 0.9 |
A1 |
||||||
|
|
|
|
|
|
|
|
|||||||
y(t) |
на выходе при возмущении |
|
|
|||||||||||
Изложенное является основной задачей синтеза АСР. |
||||||||||||||
|
|
А1 |
|
y(t)=F{нп} |
||||||||||
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
настроечные параметры |
|
|
|
|
|
|
|
|||
|
|
I |
|
регулятора |
|
|
|
|
|
|
|
|||
|
|
|
А3 |
|
|
|
|
|
|
|
||||
|
|
А2 |
|
tр |
|
t |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Теория автоматического управления (лекции) п.п. all.doc |
4 |
Чтобы настроить регулятор, необходимо выбрать:
1.критерий качества;
2.ограничения;
3.сформулировать и решить оптимизационную задачу.
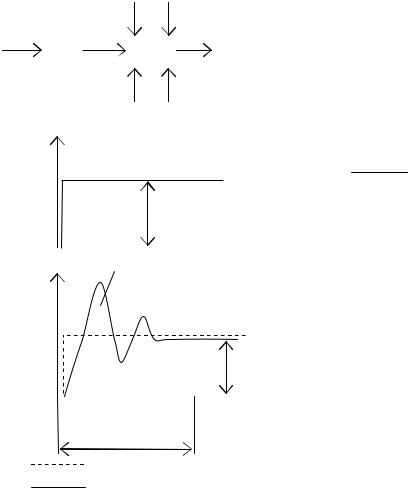
2. верхний уровень.
|
|
|
λ(t) ν(t) |
|
В качестве критерия настройки УУ используется |
|||||
|
|
|
|
интеграл: |
||||||
f(t) |
|
|
|
|
y(t) |
tp |
||||
|
|
|
|
I = ò |
|
f (t)− y(t) |
|
dt → min |
||
|
УУ |
|
АСР |
|
|
|
|
|||
|
|
|
||||||||
|
|
|
|
|
|
0 |
|
|
|
|
настроечные параметры (нп) f(t)
λ(t)=1
 t y(t) I→min
t y(t) I→min
А1
А3
1  t
t
Настройка УУ значит, что при наличии возмущения на входе, на выходе lc такое же возмущение (в идеале)
Можно также ввести степень затухания:
Ψ = A1 − A3
A1
tр
идеальный случай реальность
1.3.3. Принципы построения САУ.
1.Принцип иерархии
2.Принцип декомпозиции системы – принцип разбиения системы на уровни. Используя первый принцип, легко применить второй.
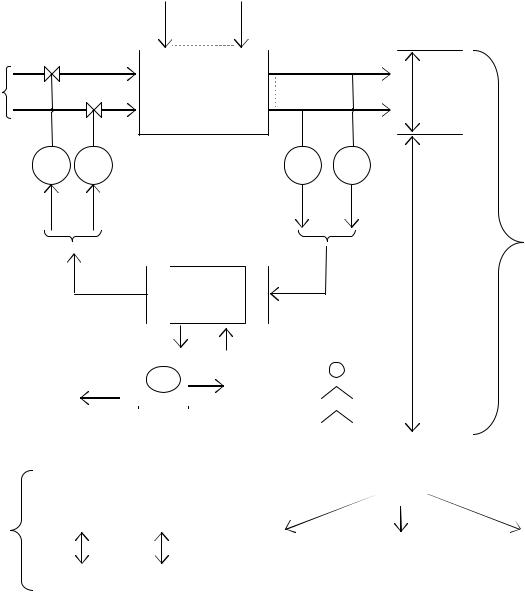
1.4. Понятие об АСУТП (Автоматизированная система управления технологическим процессом).
АСУТП – человеко-машинная система, осуществляется автоматизированный сбор и обработка информации, необходимой для оптимизации управления.
ИП – измерительный преобразователь (информация)
ИМ – исполнительный механизм (реализация управляющих воздействий) ПТК – программно-технический комплекс (центральное ядро АСУТП) УСО – устройство связи с объектом УСОП – устройство связи с оперативным персоналом
АРМ – автоматизированное рабочее место оперативного персонала АТК – автоматизированный технологический комплекс
Теория автоматического управления (лекции) п.п. all.doc |
5 |
|
(t) |
|
|
|
(t) |
Х |
|
Y |
|||
|
ТОУ ТОУ
ИМ ИМ |
ИП ИП |
АТК
У |
|
У |
АСУТП |
С |
ПТК |
С |
|
ОО
|
|
|
|
|
|
|
|
|
|
УСОП |
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
принтер |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
Архив |
|
|
|
|
|
|
|
АРМ |
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
ПЭВМ |
|
|
|
|
АРМ |
|
|||||
|
|
|
промышленного |
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
||||||||
ПТК |
|
|
изготовления |
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
Операторская |
Инженерная |
Архивационная |
|||||
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
станция |
станция |
станция |
|||
|
|
УСО |
|
|
УСОП |
|
|
|
|
|
|||||
|
|
|
|
|
1.5. Основные функции и обеспечение АСУТП. |
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
АСУТП |
|
|
|
||
Функции: |
|
|
|
|
|
|
|
|
|
Обеспечение: |
|
||||
- информационные; |
|
|
|
|
|
|
|
- техническое; |
|
||||||
- управляющие; |
|
|
|
|
|
|
|
|
|
- организационное; |
|
||||
- вспомогательные. |
|
|
|
|
|
|
|
|
|
- информационное; |
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
- метрологическое; |
|
||
|
|
|
|
|
|
|
|
|
|
|
|
- математическое; |
|
||
|
|
|
|
|
|
|
|
|
|
|
|
- программное; |
|
||
|
|
|
|
|
|
|
|
|
|
|
|
- лингвистическое; |
|
||
|
|
|
|
|
|
|
|
|
|
|
|
- эргономическое; |
|
||
|
|
|
|
|
|
|
|
|
|
|
|
- правовое. |
|
||
|
|
|
|
|
|
1.5.1. Информационные функции АСУТП. |
|
||||||||
1.непосредственный контроль и измерение технологических параметров
2.отображение информации (регистрация)
3.сигнализация отклонений логических параметров от заданных значений
4.расчет технико-экономических (косвенных) показателей (удельный расход, КПД и т.д.)
5.диагностирование информационной системы.

Теория автоматического управления (лекции) п.п. all.doc |
6 |
1.5.2. Управляющие функции АСУТП.
1.дистанционное управление
2.автоматическое регулирование
3.логическое управление (пуск и остановка оборудования, переход с режима на режим)
4.автоматические защиты и блокировки
5.оптимальное управление технологическим процессом (оптимизация)
1.5.3. Вспомогательные функции АСУТП.
1.решение внутренних задач
2.диагностирование функционирования комплекса технических средств АСУТП
3.связь с вышестоящими АСУ
ОАСУ

 - АСУ предприятий АСУП (организационно
- АСУ предприятий АСУП (организационно
экономические задачи)
АСУТП
ТОУ
1.5.4. Обеспечение АСУТП.
∙Техническое обеспечение – комплекс технических средств, необходимых для реализации функциональных задач АСУТП (программно-технический комплекс ПТК + автоматизированное рабочее место оперативного персонала АРМ).
∙Организационное обеспечение – совокупность правил и предписаний, обеспечивающих взаимодействие персонала с комплексом технических средств.
∙Информационное обеспечение – направление и характеристики информационных потоков.
∙Метрологическое обеспечение – совокупность показателей точности, надежности и быстродействия.
∙Программное обеспечение – совокупность программ, обеспечивающих функционирование комплекса технических средств (КТС) АСУТП и решение функциональных задач.
Программное обеспечение (ПО):
- Общее ПО – обеспечивает функционирование КТС АСУТП; поставляется изготовителем. - Специальное ПО – обеспечивает решение функциональных задач; разработчик – АСУТП.
∙Лингвистическое обеспечение – совокупность терминов и правил формализации языка общения персонала с КТС.
∙Эргономическое обеспечение – совокупность требований, предъявляемых к способам и формам представления информации, а также к формам и размещениям КТС.
∙Правовое обеспечение – юридическое обоснование функционирования АСУТП.
1.5.5. Понятие об оптимальном управлении.
Оптимальное управление осуществляется в соответствии с выбранным критерием оптимальности, на который накладываются технические ограничения.
Пусть критерий оптимальности: F = F{x(t), y(t)}, где х – входные параметры, у – выходные параметры. Критерий оптимальности равен целевой функции.
xmin ≤ x ≤ xmax ymin ≤ y ≤ ymax
Надо найти х, у → opt , которые соответствуют экстремуму F.
Теория автоматического управления (лекции) п.п. all.doc |
7 |
Критерий оптимальности – показатель, характеризующий качество работы технологического объекта управления и принимающий различные значения в зависимости от управляющих воздействий.
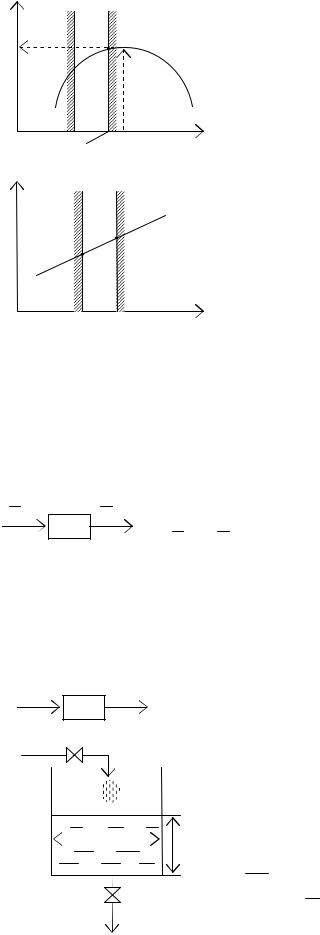
ПРИМЕР: F = F{x}
F |
xmin |
xmax |
Если нет ограничений, то критерий оптимальности: xopt |
® Fmax |
Fmax |
|
|
||
|
|
|
|
|
xopt |
x |
|
|
|
|
xopt, огр. |
|
F |
|
Для линейной функции задача оптимизации не имеет смысла |
|
|
без ограничений. |
Fmin |
Fmax |
|
x
xmin xmax
2. Динамические системы. Способы математического описания.
Любой технологический объект управления (ТОУ) и любая САУ являются динамическими системами.
2.1. Понятие о динамической системе (ДС).
F(t)
X(t) ДС Y(t) ДС - система, входы и выходы которой изменяются во времени.
Y(t) = X(t)× F{X(t)}
2.2. Описание динамической системы (ДС) с помощью дифференциальных уравнений (ДУ).
Основным математическим аппаратом, позволяющим исследовать ДС являются дифференциальные уравнения, аргументом в которых служит время.
ПРИМЕР:
Gпр(t) ДС H(t)
Gпр(t)
Fсеч |
Но |
|
|
К |
α |
|
Ратм, Gсток(t) |
В основе дифференциальных уравнений, описывающих ДС, лежат уравнения сохранения вещества и энергии для нестационарного режима.
Уравнения материального и теплового баланса – уравнения сохранения вещества и энергии.
ì |
о |
(t)- G |
о |
(t) = 0, стационарный режим |
ïG |
пр |
ст |
||
í |
|
(t)- G |
|
(t)× dt = dV = FdH |
ïG |
пр |
ст |
||
î |
|
|
V = F × H Þ dV = FdH - приращение объема
Уравнение материального баланса для нестационарного режима.
F × dHdt = Gпр - Gст - дифференциальное уравнение для емкости
Gст (t) = a
 Н, a - положение клапана К
Н, a - положение клапана К
Теория автоматического управления (лекции) п.п. all.doc |
8 |
||||||
F × |
dH |
= Gпр (t)- a |
|
Þ |
|
||
Н |
|
||||||
|
|
||||||
|
dt |
|
|||||
F × |
dH |
+ a |
|
= Gпр (t) - нелинейное |
уравнение, правая часть характеризует вынужденное |
||
Н |
|||||||
dt
движение. Так как в процессе регулирования отклонения не большие, то
приняли гипотезу о линеаризации дифференциальных уравнений.
Но 
2.3. Линеаризация дифференциальных уравнений.
Линеаризация методом касательной.
y(t) fo[x(t)]
область регулирования x(t)
В основе линеаризации гладких (дифференциальных) функций лежит метод разложения в ряд Тейлора.
y(t) = f[x(t)] |
¶f0 [x(t)] |
|
|
|
|
¶ 2f0 [x(t)] |
|
|
|
|
y(t) = f0 [x(t)]+ |
|
× Dx + |
1 |
× |
|
× Dx2 |
+ ... |
|||
¶t |
2! |
¶t2 |
||||||||
|
|
|
|
|
||||||
Линеаризация не требует производных выше первого порядка (все остальное отбрасываем). y(t)- f0 [x(t)]= Dy(t) = a × Dx Þ Dy(t) = a × Dx(t), где а – тангенс угла наклона касательной.
ПРОДОЛЖЕНИЕ ПРИМЕРА. |
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||
F × |
dH(t) |
|
|
= G |
пр (t)- a |
Н(t) |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||
|
|
|
|
|
dt |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Примем, что Gпр (t) = Gпр,0 + DGпр (t) |
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|||
a H(t) = a |
|
H0 (t) + a |
|
|
|
DH |
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||
|
2 H0 |
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
a H0 (t) = G |
ст0 , a |
|
|
|
DH - производная a |
|
|
H(t) |
|||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||
2 H0 |
|
|
|||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
Для стационарного режима Gпр0 |
= Gст0 , при этом Н = Н0 |
||||||||||||||||||||||||||||||||||||||
F |
d[H0 + DH] |
= Gпр,0 + DGпр |
- G |
ст,0 - a |
1 |
|
DH |
||||||||||||||||||||||||||||||||
|
|
|
|
dt |
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
2 H0 |
||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
dH0 |
|
= 0, тта как H0 |
= const |
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||
|
dt |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Gпр,0 - Gст,0 |
= 0, ттогд |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||
F |
dDH(t) |
+ a |
|
|
1 |
|
|
|
DH(t) = DGпр (t)- ллинейнод.у. относительно приращенного уровня |
||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||
|
|
dt |
|
|
|
|
2 H0 |
|
|
||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
Можно принять, что DH(t) = y(t); DGпр (t) = x(t) |
|||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
dy(t) |
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
+ y(t) = |
|
|
H0 |
|
x(t) |
|
|
|
|
|
|
|||||||||||||
F × 2 H |
0 |
|
|
× |
× |
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||
|
|
a |
|
|
dt |
|
|
a |
|
|
|
|
|
|
|
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
H0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
F × 2 |
|
|
H |
0 |
|
|
× |
= T, |
|
|
|
|
|
= k |
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
a |
|
|
a |
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
Теория автоматического управления (лекции) п.п. all.doc |
9 |
Окончательное дифференциальное уравнение: T dydt(t) + y(t) = k × x(t)
Если задать x(t) = const = 1(t)
Т – постоянная времени, k – коэффициент усиления
2.4. Решение линейных дифференциальных уравнений с правой частью.
Решение складывается из свободной и вынужденной частей:
y(t) = yсвоб (t)+ yвын (t)
n
yсвоб (t) = åСi × eri ×t , где
i=1
Сi – постоянная интегрирования (определяется начальными условиями) ri – корни характеристического уравнения
n – порядок дифференциального уравнения
yвын (t) = k × x(t)
ПРОДОЛЖЕНИЕ ПРИМЕРА. yсв (t) = C × er×t
T × r + 1 = 0 - ххарактерстическое уравнение Þ r = - T1
- 1
yсв (t) = C × e T
t
y(t) = C× e- T + k × x(t)- решение дифференциального уравнения Ищем С :
y(t)t=0 = C + k × x(t) = 0 Þ C = -k × x(t)
|
|
|
|
t |
|
t |
|
|
|
|
y(t) = -k × x(t)× e- |
|
+ k × x(t) = k × x(t)é1 - e |
- |
|
ù |
- окончательное решение |
||||
T |
T |
|||||||||
|
|
|
|
ê |
|
|
ú |
|
k=2 |
|
|
|
|
|
ë |
|
|
û |
|
||
Пусть x(t) = 1,0; Т = 10; k = 2, ттогд |
|
|
|
|
|
|||||
é |
- |
t |
ù |
|
|
|
|
|
||
y(t) = 2 ×1ê1 - e |
10 |
ú |
|
|
|
|
Т=10 |
|||
ë |
|
|
|
û |
|
|
|
|
|
|
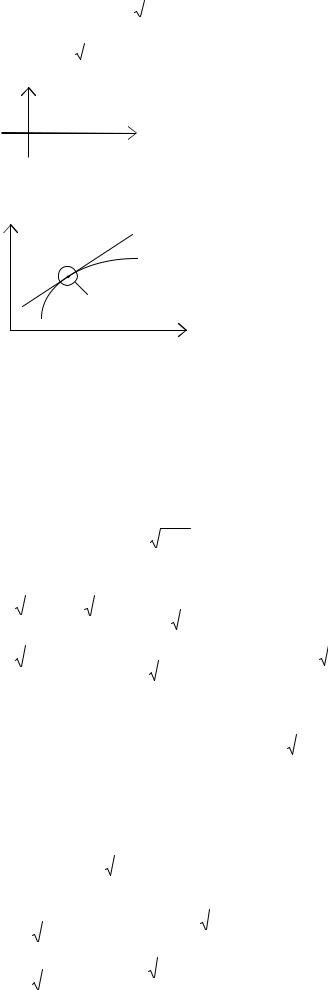
Линеаризованная динамическая система в теории автоматического управления называется
линейной динамической системой.
T |
dy(t) |
+ y(t) = k |
|
× x(t) |
|||
dt |
|
|
|||||
a |
|
|
a |
|
|
||
А-звено (апериодическое звено). |
|||||||
|
|
|
é |
|
|
-t |
ù |
|
|
|
|
|
|
||
y(t) = kа × x(t)ê1 |
- eTа ú - решение дифференциального уравнения |
||||||
|
|
|
ê |
|
|
ú |
|
|
|
|
ë |
|
|
û |
|
|
|
|
y(t) |
|
x(t) = 1 |
|
|
||
|
|
|
|
|
dy(t) |
|
ka |
|
|
|
|
|
|
|
|
= |
|
||
|
|
|
|
|
|
dt |
|
T |
|
|
|
|
|
|
|
|
t=0 |
a |
|
|
|
|
|
|
Та – время по истечении которого y(t) |
||||
|
|
|
|
|
|||||
1(t) |
|
|
kа |
|
достигнет |
установившегося значения, |
|||
|
|
|
если |
будет изменяться с постоянной |
|||||
|
|
|
|
||||||
|
t |
|
|
t |
скоростью. |
|
|
||
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
Та
Теория автоматического управления (лекции) п.п. all.doc |
10 |
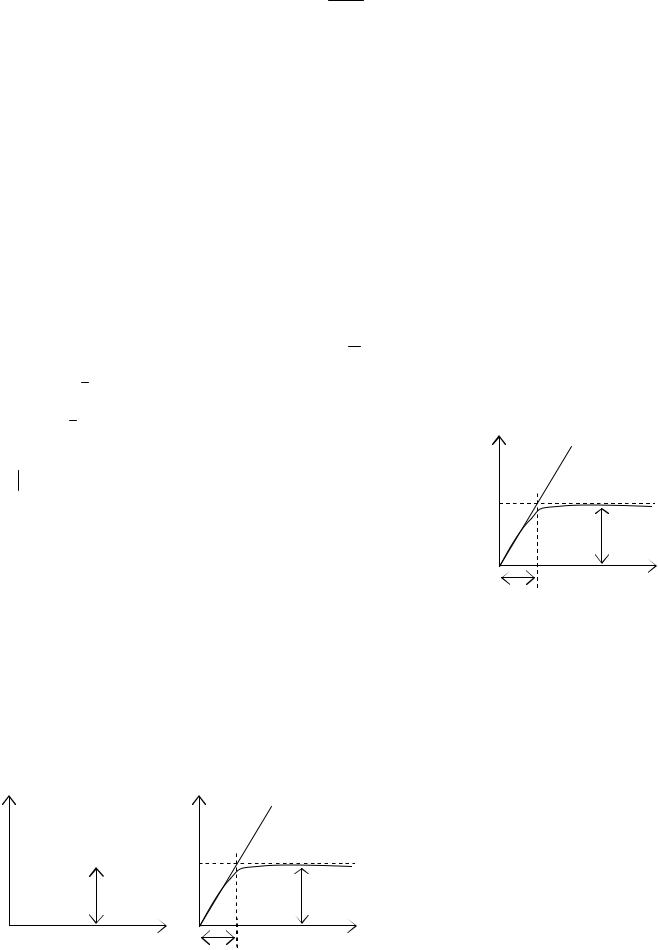
2.5. Временные характеристики линейных ДС (ЛДС).
2.5.1. Кривые разгона.
Кривая разгона ДС – это реакция на ступенчатое возмущение.
х(t)
Х·1(t)
 t у(t)
t у(t)
у(t)∞=k·х
кривая
разгона
 t
t
- инерционность ЛДС
2.5.2. Переходные характеристики ЛДС.
h(t) = y((t))
x t
Переходная характеристика h(t) – реакция ЛДС на единичное ступенчатое возмущение.
( ) ì0,t p 0
1 t = í
î0,t ³ 0
Кривые разгона нормируют (пересчитывают на переходные характеристики).
h1 (t) = |
y |
1 |
(t) |
,h2 (t) = |
y |
2 |
(t) |
,... |
||
x1 |
( ) |
|
x2 |
( ) |
|
|||||
|
t |
|
t |
|
||||||
Усредненная переходная характеристика:
y1(t)
y2(t)  t y3(t) y4(t)
t y3(t) y4(t)
n
åhi (t) h(t)ср = i=1 n
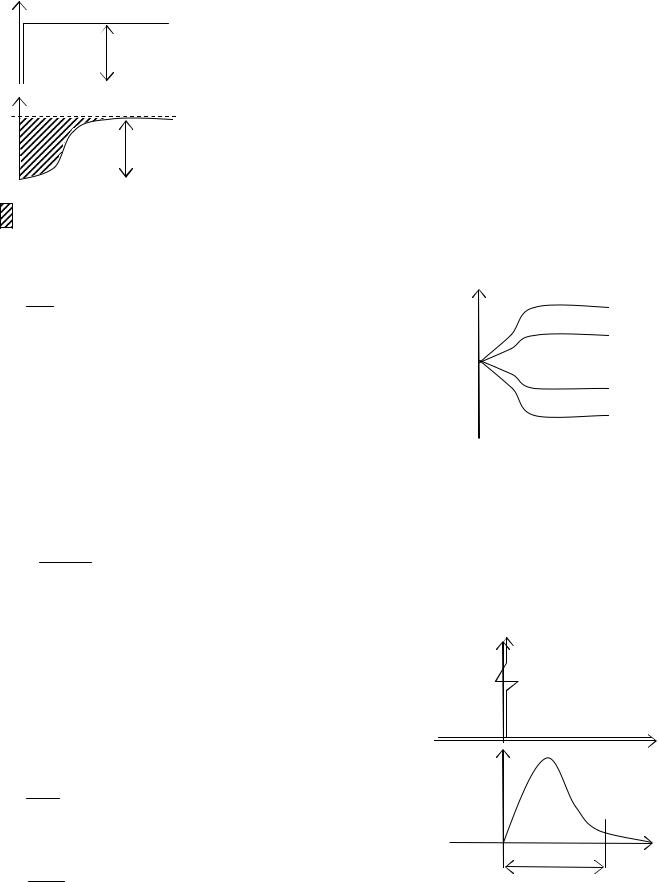
2.5.3. Импульсные характеристики ЛДС.
Импульсные характеристики ЛДС –
реакции на дельта-функцию Дирака
( ) |
ì0,t ¹ 0 |
d t |
= í |
|
î¥,t = 0 |
+∞
òd(t)dt = 1
−∞
d(t) = d1(t)
dt
d(t) - дельта-функция равна производной единичного возмущения по времени.
w(t) = dhdt(t)- импульсная характеристика.
δ(t)
ω(t)
T
t
t