

tau lekcii 2006
.pdfТеория автоматического управления (лекции) п.п. all.doc |
21 |
5. Соединение элементарных динамических звеньев (ЭДЗ).
5.1. Общие сведения.
Виды соединений.
1.параллельное;
2.последовательное;
3.встречно-параллельное;
4.комбинированное.
ПРИМЕР:
|
|
|
|
|
|
|
|
|
Wэкв(s) |
W1 ¸ W6 (s) - передаточные функции |
||
|
|
|
|
|
W2(s) |
|
|
|
|
|
|
ЭД систем. |
x(t) |
|
|
|
|
|
± |
|
|
|
y(t) |
||
|
± |
W1(s) |
|
± |
W4(s) |
|
|
|
||||
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
W3(s) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
± |
|
W5(s) |
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
||
|
|
± |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Правила. |
|
|
|
W6(s) |
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
||||
|
|
x(t) = x1 (t) = x2 (t) = x3 (t) |
|
|||||||||
1. |
x(t) |
x1(t) |
|
|||||||||
|
|
x2(t) |
|
|
|
|
|
|
|
|
|
|
|
|
x3(t) |
|
|
|
|
|
|
|
|
|
|
2. |
x1(t) |
x(t) |
алгебраический сумматор: x(t) = ±x1 (t)± x2 (t) |
|||||||||
|
± |
± |
|
|
|
|
|
|
|
|
|
|
|
|
x2(t) |
|
|
|
|
|
|
|
|
|
|
3. |
x(s) |
|
y(s) |
y(s) = x(s)× W(s) |
|
|||||||
|
|
W(s) |
|
|
|
|
|
|
|
|
|
|
5.2. Параллельное соединение ЭДЗ.
|
|
|
|
|
y |
1(s) |
|
W1(s) |
|
|
|||
|
|
|
|
|||
|
|
|
|
|
||
x(s) |
|
|
y2(s) |
|
± y(s) |
|
|
W2(s) |
|
|
|
||
|
|
|
± |
± |
||
|
|
|
|
yn(s) |
|
|
|
Wn(s) |
|
|
|
||
Wэкв(s)
y(s) = ±y1 (s)± y2 (s)± ... ± yn (s) y1 (s) = x(s)× W1 (s)
M
yn (s) = x(s)× Wn (s)
y(s) = x(s)× [± W1 (s)± W2 (s)± K± Wn (s)]
Wэкв (s) = yx((ss)) = ±W1 (s)± W2 (s)± K± Wn (s)
Правило: Эквивалентная передаточная функция параллельного соединения звеньев равна сумме их передаточных функций.
n
КЧХ: W(jw)s→jω = åWi (jw)
i=1
ПРИМЕР: (из лабораторной работы №1). Параллельное соединение П-звена и И-звена.
Wэкв (s) = Wп (s)+ Wи (s) = k + Tи1× s

Теория автоматического управления (лекции) п.п. all.doc |
|
|
22 |
|||||||
|
|
|
y1 |
|
jIm(ω) |
|
||||
|
|
k |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
k |
y(t) |
|
|||
|
|
|
|
|
|
|
||||
|
|
П-звено |
|
|
|
|
|
|
|
|
x(t) |
|
+ |
|
|
k |
П-звено |
||||
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Re(ω) |
И-звено |
у2 |
- |
ωi |
φэкв(ωi) |
|
|
|
КЧХ |
|
1 |
|
|
Аэкв(ωi) |
|
|
1(t) |
параллельного |
||
Тиs |
|
Ти |
|
соединения |
|
|
|
двух звеньев |
W |
(jw) |
|
|
|
|
|
|
= k + |
|
|
1 |
|
|
|
|
|
= k - j |
1 |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
экв |
|
|
|
|
s®jw |
|
|
|
|
|
|
Tи × jw |
|
|
|
|
|
|
|
Tи × w |
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
Aэкв |
(w) = |
|
|
k |
2 |
+ |
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
(Ти × w)2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
j(w) = -arctg |
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
k × Ти × w |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
При ω → 0 ; j ® - p |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
W (jw) = k ; W |
(jw) = |
|
|
1 |
|
|
|
× e- j |
p |
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||
п |
|
|
|
|
|
|
|
|
|
|
и |
|
|
|
|
|
|
Tи × w |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
5.3. Последовательное соединение ЭДЗ. |
|
|
|
|
|||||||||||||
x(t) |
|
|
|
у1(t) |
|
|
|
|
|
|
у2(t) |
|
|
|
у(t) |
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
|
W1(s) |
|
|
W1(s) |
|
|
|
|
|
W1(s) |
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
y(t) = L-1 {W × W × W |
} |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
1 |
|
|
|
|
2 |
|
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
y(s) = y2 (s)× W3 (s) = y1 (s)× W2 (s)× W3 (s) = x(s)× W1 (s)× W2 (s)× W3 (s) |
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||
Wэкв |
( ) |
= |
|
y(s) |
= W1 |
( ) |
× |
|
|
|
|
|
( ) |
|
|
( ) |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
|
s |
|
x(s) |
|
s |
W2 s |
× W3 s |
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
Wэкв (jw) |
|
s® jw = W1 (jw)× W2 (jw)× W3 (jw) |
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||
Правило: |
|
|
|
|
Передаточная функция или КЧХ последовательного соединения звеньев равна |
|||||||||||||||||||||||||||||||||||||||
ПРИМЕР: |
|
|
|
произведению передаточных функций или КЧХ входящих в соединение звеньев. |
||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
х(t) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
у(t) |
|
|
|
|
|
|
|
|
|
jIm(ω) |
|
π |
|
|
|
|
|
И-звено |
|
|
|
|
|
|
А-звено |
|
|
|
|
|
|
|
|
|
|
|
ω→∞ |
|
2 |
|
|
Re(ω) |
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Wэкв |
|
φ(ωi)=45º |
||||
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
ka |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ωi |
|
|
|
ωi |
|
||||||||
|
|
|
Тиs |
|
|
|
|
|
|
|
|
|
Тas + 1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Wa(jω) |
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Wи(jω) |
|
|||
Wэкв (s) = Wи (s)× Wa (s) = |
|
|
|
|
|
|
|
ka |
|
|
|
ω→0 |
|
|
|
|
|
|||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||
Tи |
× s × (Ta × s + 1) |
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
W |
(jw) = |
|
|
1 |
|
× e |
2 |
× |
|
|
|
|
|
|
|
|
ka |
|
|
|
× e-arctg(Ta ×w) = |
|
ka |
× e |
é p |
|
ù |
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ë |
2 |
|
û |
||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
- jp |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
- jê |
|
+arctg(Ta ×w)ú |
||
экв |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Tи |
× w |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
T2 |
× w2 |
+ 1 |
|
|
|
|
T × w × T2 × w2 + 1 |
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
14243 |
|
14444244443 |
и |
|
a |
|
|
|
|
|
|||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
a |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
И-звено |
А-звено |
|

Теория автоматического управления (лекции) п.п. all.doc |
23 |
||||
® Аи (wi )× Аa (wi |
); j = - p |
- p |
= - |
3p |
|
4 |
|
||||
|
2 |
4 |
|
|
|
Правило перемножения векторов:
При перемножении векторов аргументы (ФЧХ) складываются, модули (АЧХ) перемножаются.
Теоретически |
ω = 0 ÷ ∞ |
|
jэкв (0) = - p |
|
|
|
||
При |
|
ω = 0 |
Аэкв (0) = ¥ |
|
|
|
||
|
|
|
|
|
2 |
|
|
|
|
|
ω → ∞ |
Аэкв (¥) = 0 |
jэкв (¥) = -p |
|
|
|
|
|
|
|
5.4. Встречно-параллельное соединение ЭДЗ. |
|
|
|||
x(t) |
x1(t) |
|
Wэкв(s) |
y(t) Обратная связь может быть со знаком “+” или “-”. |
|
|||
|
|
|
|
“+” – положительная обратная связь (ПОС) |
|
|||
|
|
W1(s) |
|
|
||||
± |
x2(t) |
|
|
“-” – отрицательная обратная связь (ООС) |
|
|||
|
|
|
||||||
|
|
ПОС раскачивает систему. |
ООС |
стабилизирует |
систему |
|||
W2(s) |
|
|||||||
|
|
|
||||||
|
|
|
(направлена |
на исключение |
внешнего |
влияния).ООС |
лежит в |
|
|
|
|
|
|||||
основе стабилизирующих автоматических систем регулирования (АСР). ПОС используется в позиционном регулировании.
( |
) |
= |
|
y(s) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
Wэкв s |
|
|
|
x(s) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
} |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
y(s) = x |
|
(s)× W |
|
(s) = |
|
|
|
|
|
|
|
ПОС |
|
(s) |
|
|
[x(s)± x |
|
(s)]× W (s) = [x(s)± y(s)× W (s)]× W (s) |
|||||||||||||||||||
1 |
|
x |
1 |
(s) = x(s) ± x |
2 |
= |
2 |
|||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
{ |
|
|
|
|
|
|
|
|
|
1 |
2 |
1 |
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ООС |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Wэкв (s) = |
|
|
|
|
|
|
W1 (s) |
|
|
|
|
|
|
- ПОС |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
1 ± W1 (s)× W2 (s) |
|
+ ООС |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
ПРИМЕР: |
|
|
|
|
|
|
|
|
|
|
|
|
|
λ(s) |
|
|
|
|
|
|
|
U(s) - задание регулятору |
|
|
||||||||||||||
|
|
|
|
|
|
|
|
Автоматический |
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
Объект |
|
|
|
|
|
l s |
) |
- возмущение по каналу |
регулирующего |
||||||||||||||||
U(s) |
|
|
|
|
|
|
|
|
регулятор |
|
|
|
|
|
|
регулирования Y(s) |
( |
|
|
|
|
|||||||||||||||||
_ |
|
|
|
|
|
|
|
|
|
Wр(s) |
|
|
|
± |
|
Wо(s) |
|
|
|
|
|
воздействия |
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
U(s) |
|
y(t) |
t Uзад |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Если на входе |
t , то на выходе |
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Если изменилось |
l(s), то регулятор |
должен на |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
П-звено = 1.0 |
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
выходе скомпенсировать изменение λ : |
y(t) |
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
(единичная обратная связь) |
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
λ |
|||||||||||||
Канал U(t)® y(t) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
t |
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ü |
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
6447448 |
|
|
|
|
|
|
ï |
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
т.к. послеоавтельное соеинение |
|
|
|
|
|
ï |
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Wp (s)× Wo (s) |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
WU−Y |
= |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ï |
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
1 |
|
|
|
|
|
+ W |
(s)× W (s)× |
1 |
|
|
|
|
|
|
|
|
||||||||||||||||||
экв |
|
|
|
|
|
|
|
|
|
|
|
|
ï |
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
{ |
|
|
|
|
|
{ |
|
|
p |
|
|
o |
|
|
{ |
ï |
|
|
|
|
|
|
|
||||
|
|
|
|
|
всегда в знаменателе |
ООС1442443 |
П-звено ýПравилоМейсона |
|
|
|
||||||||||||||||||||||||||||
|
|
|
( |
) |
|
|
|
( ) |
|
|
|
|
|
|
|
замкнутый контур |
|
|
|
|
ï |
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
Канал l t |
|
|
® y t |
|
|
|
|
|
|
|
|
|
|
|
|
|
ï |
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
Wo (s) |
|
|
|
|
|
|
|
|
|
|
|
|
|
ï |
|
|
|
|
|
|
|
||||||
λ−Y |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ï |
|
|
|
|
|
|
|
|||||||
Wэкв = 1 + W |
|
(s)× W (s)×1 |
|
|
|
|
|
|
|
|
ï |
|
|
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
p |
|
|
|
|
|
o |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
þ |
|
|
|
|
|
|
|
Wэкв (jw) = Wэкв (s) |
|
s= jω |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
При U(t) = 1 и l(t) = 1 , |
y(t) можно определить: |
|
|
|
|
|
|
|||||||||||||||||||||||||||||||
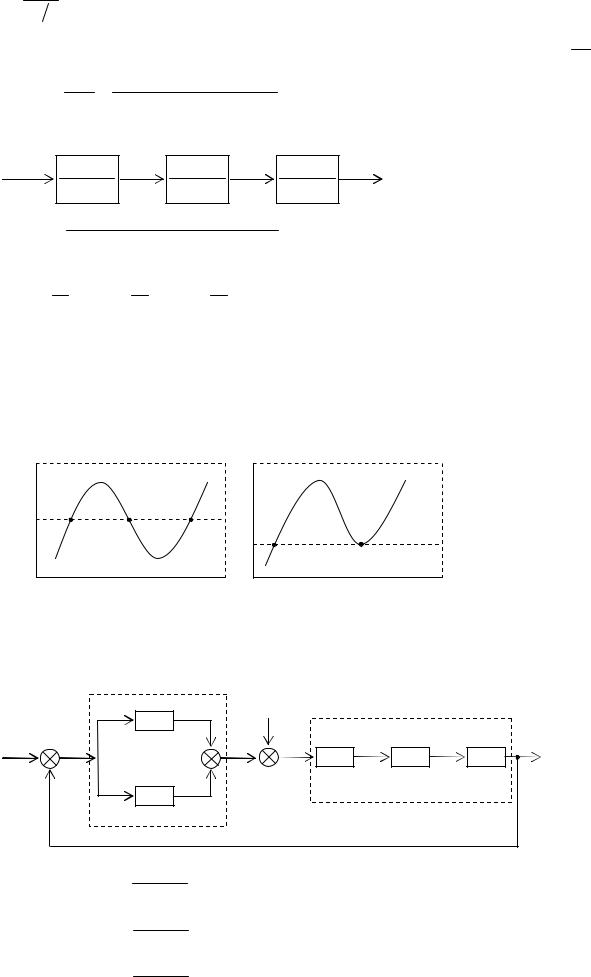
1.через решение эквивалентного дифференциального уравнения
2.через Wэкв (s) и обратное преобразование Лапласа L−1 {U(s)× WэквU−Y (s)}
3.через Wэкв (jw) и обратное преобразование Фурье

Теория автоматического управления (лекции) п.п. all.doc |
24 |
Wэкв |
(s) = |
|
|
|
|
|
W1 (s)× [W2 (s)+ W3 (s)]× W4 (s) |
||||
1 + W1 |
(s)× [W2 (s)+ W3 (s)]× W4 (s)× [W5 (s)+ W6 (s)] |
||||||||||
|
|
||||||||||
ПРИМЕР: (лабораторная работа №2) |
|||||||||||
|
|
|
И-звено |
|
|
А-звено |
|||||
|
|
регулятор |
|
объект |
|||||||
|
|
1 |
|
|
|
ka |
|||||
U(s) |
|
|
|
Ти ×s |
|
|
|
Тa × s + 1 |
Y(s) |
||
_ |
|
|
Wи(s) |
|
|
Wа(s) |
|
|
|||
|
|
|
|
|
|
|
|
|
|
||
(единичная обратная связь)
ka ,Ta = const;Ти |
= var |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
Канал U(t)® y(t) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
W (s)× W |
(s) |
|
|
|
|
|
|
|
1 |
|
× |
|
|
ka |
||||||
WU−Y = |
|
|
= |
|
|
Т |
и |
× s |
Т |
a |
× s + 1 |
|
||||||||||
|
|
и |
а |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
экв |
1 + W (s) |
× W |
(s) |
1 |
|
|
|
|
|
|
|
ka |
||||||||||
|
|
|
и |
|
а |
|
|
+ Ти × s × (Тa × s + 1) |
||||||||||||||
WU−Y = |
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Ти × Тa × s2 + Ти × s + 1 |
|
|
|
|
|
|
|
||||||||||||||
экв |
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
k |
|
|
|
|
k |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
14243 |
|
|
{ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
a |
|
|
|
|
a |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
T22 |
|
|
|
T1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
ka
k
= (Ти × Тa × s2 +a Ти × s + ka ) =
ka
s ® |
1 |
; |
s |
2 ® |
1 |
|
|
||
|
dt2 |
|
|||||||
|
|
dt |
|
|
|
||||
Обратное преобразование: |
|||||||||
T2 × |
d2 y(t) |
+ T × |
dy(t) |
+ y(t) = 1× U(t) |
|||||
|
|
||||||||
2 |
|
dt |
2 |
1 |
|
dt |
|
||
|
|
|
|
и Т1 (то есть от Ти, Та, ka) вид y(t) будет меняться. |
|||||
В зависимости от T2 |
|||||||||
|
|
|
|
|
|
2 |
В такой системе расходящихся колебаний быть не может. |
||
y(t) |
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
Решение дифференциального уравнения [1] |
y(t) = yвынужден (t)+ yсвоб (t)
1, при U(t)=1(t) yвынужден (t) = 1× U(t)U(t )=1 = 1 ¬ определяется правой частью
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
t |
|
2 |
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
усвоб (t) = åCi × erit = C1 × er1t + C2 × er2t |
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
i=1 |
|
|
r , |
r - корни характеристического уравнения [T2 × r2 |
+ T × r + 1 = 0, при y(t) ¹ 0] |
|||||||||||||||||||
1 |
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
1 |
|
|
|
|
|
T1 |
|
æ |
T1 |
ö2 |
|
|
1 |
|
|
|
|
|
|
|||
r1,2 |
|
|
|
|
|
ç |
÷ |
|
|
|
|
|
|
|
|
|
|||||
= - |
|
|
± |
ç |
|
÷ |
|
- |
|
|
|
|
|
|
|
||||||
|
2T |
2T |
|
T2 |
|
|
|
|
|||||||||||||
|
|
|
|
2 |
|
|
è |
|
2 |
ø |
|
|
|
2 |
|
|
|
|
|
|
|
Варианты: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
a. подкоренное выражение больше 0 Þ T1 |
f 2T2 |
|
|||||||||||||||||||
* подкоренное выражение равно 0, если T1 |
= 2T2 |
|
|||||||||||||||||||
корни: r1 = -a1 ; r2 = -a2 |
(корни вещественны и отрицательны). |
||||||||||||||||||||
y(t) = 1 + C1e−α1t + C2e−α2t |
|
|
|
|
|
|
|
||||||||||||||
С1 и С2 → из нулевых начальных условий: |
a2 |
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ì |
|
||
( |
) |
|
|
|
|
|
|
|
|
|
= 0 |
|
|
|
ü |
ïC1 = - |
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
y t |
|
t=0 |
= 1 + C1 |
+ C2 |
|
|
ï ï |
a2 - a1 |
|
||||||||||||
y¢(t) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ý Þ |
í |
a1 |
|
|
||
|
|
= -a × C - a × C = 0ï |
ïC2 = + |
|
|||||||||||||||||
|
|
|
t=0 |
|
|
|
1 |
|
1 |
|
|
2 |
|
|
2 þ |
ï |
a2 - a1 |
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
î |
|
||

Теория автоматического управления (лекции) п.п. all.doc |
|
25 |
|||
Окончательно: y(t) = 1 - |
|
a2 |
× e-a1t + |
a1 |
× C2e-a2t |
a2 |
|
|
|||
|
- a1 |
a2 - a1 |
|||
y(t)
Апериодическое звено 2-го порядка;
1  А-звено
А-звено
 t y(t)
t y(t)
точка перегиба
Примечание: Динамическую систему, которая описывается линейным дифференциальным уравнением 2-го порядка, принято называть инерционным звеном 2-г порядка.
Если корни вещественны, отрицательны и различны, то такое звено называют апериодическим звеном 2-го порядка.
Такое звено можно заменить:
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
t |
х(t) |
|
|
|
|
|
|
|
|
у(t) |
τ |
|
|
T |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
З-звено |
|
|
|
А-звено |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
е-st |
|
|
|
|
|
k |
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Т × s + 1 |
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
W |
|
(s) = |
|
|
|
1 |
|
|
× e-t×s |
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
экв |
|
|
|
T × s + 1 |
|
|
|
|
|
|
y(t) c |
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
b. T |
= 2T |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
1 |
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
b |
|
|
|
|
|||
r1 = r2 = -a |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
y(t) = 1 + (C1 |
+ C2 )× e-a×t , при х(t) = 1 |
|
|
а |
1 |
|||||||||||||||||||||||
Начальные условия: |
|
|
|
|
|
|
|
|
t |
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
y(t) |
|
|
= 0 |
|
ü |
|
ìC1 = -1 |
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
t=0 |
|
|
|
|
|
ï |
|
|
|
|
|
|
|
|
|
|
|
|||||||||
y¢(t) |
|
= 0 |
ý |
Þ í |
C |
|
= -a |
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
ï |
|
î |
2 |
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
t=0 |
|
|
|
|
|
þ |
|
|
|
решение: y(t) = 1 - (1 + a × t)× e-a×t |
|
|
|
|
|
|
|
|
|
|
|||||
Окончательное |
|
- граница |
между |
|
вещественными и |
|||||||||||||||||||||||
комплексными конями. |
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
c. T1 p 2T2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
корни: r1 = r2 |
= -a ± jw |
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
1 |
|
|
|
æ |
T1 |
ö2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
* w = |
|
|
- |
ç |
|
÷ |
|
- расчетная частота собственных колебаний; |
- 1 = j |
|
|
|
|
|||||||||||||||
|
T2 |
2T |
|
|
|
|
|
|
||||||||||||||||||||
|
ç |
÷ |
|
|
|
|
|
|||||||||||||||||||||
|
|
|
|
2 |
|
|
|
è |
|
2 ø |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
y(t) = 1 + (C1 × Coswt + C2 × Sinwt)× e-a×t |
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
Начальные условия: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
y(t) |
|
|
= 0 |
|
ü |
|
ìC1 = -1 |
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
t=0 |
|
|
|
|
|
ï |
|
ï |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
y¢(t) |
|
|
|
|
|
|
ý |
Þ í |
C |
|
= - |
a |
|
|
|
|
|
|
|
|
|
|
||||||
|
= 0ï |
|
ï |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
t=0 |
|
|
|
|
|
þ |
|
|
|
|
2 |
|
|
w |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
î |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
æ |
a |
ö |
× e-a×t |
Окончательное решение: y(t) = 1 - çCoswt + |
w |
× Sinwt÷ |
|
è |
ø |
|
1.Та = 10; Ти = 10; kа = 1
2.Ти,1 = 0.2·Ти
3.Ти,2 = 5·Ти
y(t) А1 |
|
|
|
Т0 |
= |
2p |
– период собственных колебаний |
|
|
||||
|
|
А3 |
w |
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
А3 |
|
= А1 × e-at |
|
|
||||||
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|||||||
|
а |
|
1.0 |
w = |
|
2p |
|
– экспериментальная частота собственных колебаний |
|||||
0 |
|
t |
|
Т0 |
|||||||||
|
|
|
|
|
|
|
|
|
|||||
|
Т0 |
Т0 |
Для таких систем вводят степень затухания: y = |
А1 - А3 |
|
||||||||
|
|
|
|||||||||||
|
|
|
А1 |
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
||

Теория автоматического управления (лекции) п.п. all.doc |
26 |
Возьмем отрезок [0;Т0 ] - см. график
y= А1 - А1 × e−αT0 = 1 - e−α 2ωπ
А1
a |
|
= m - степень колебательности. |
|
||
w |
|
|
y = 1 - e−2πm |
|
|
|
|
На практике ψ = 0.7 ÷ 0.9 |
|
|||
|
|
|
|
|
ψ |
|
0.7 |
0.9 |
|
m |
|
0.221 |
0.366 |
|
Теоретически ψ = 0 ÷ 1 |
y(t) 2.0 |
|||
|
|
m = 0 ÷ ∞ |
||
|
|
|
||
d. T1 = 0
корни: r1 = r2 = ±jw - чисто мнимые y(t) = 1 - Coswt
Подбирая коэффициенты Ти можно подобрать вид кривой. Частотные характеристики инерционного звена 2-го порядка.
Wэкв (s) = Wи |
(s)× |
Wa (s)× |
|
1 |
|
|
|
- соответствии со схемой. |
||||
1 |
+ Wи (s)× Wa |
(s) |
||||||||||
|
|
|
|
|
|
|
||||||
Wэкв (jw) |
|
s→jω |
= |
|
Wи (jw)× Wa (jw) |
|
|
|
||||
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
||||
|
1 |
+ Wи (jw)× Wa (jw) |
|
|
|
|||||||
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
||||||
Можно получить Wэкв (s) и Wэкв (jw) из дифференциального уравнения.
W |
(s) = |
Y(t) |
|
= |
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
2 |
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
экв |
|
|
|
( ) |
|
|
× s |
+ T1 |
× s + 1 |
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
X t |
|
T2 |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
Wэкв |
(jw) = |
|
|
|
|
|
|
|
|
1× (1 - T2 × w2 |
- jT × w) |
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
1 |
|
|
|
|
|
|
= |
||||||||
|
(T2 |
× (jw)2 + T × jw + 1)× |
(1 - T2 × w2 |
- jT × w) |
||||||||||||||||||||||||||||
|
|
|
|
|
2 |
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
2 |
|
|
1 |
|
|
|
||||||
|
|
1 - T2 × w2 |
|
|
|
|
|
|
|
|
|
|
|
T × w |
|
× w2 |
|
|
|
|
||||||||||||
= ( - T22 × w2 )2 |
+ T12 |
× w2 - j× ( - T22 × w2 )2 + T12 |
|
|
|
|
||||||||||||||||||||||||||
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|||
14444244443 |
|
|
14444244443 |
|
|
|
|
|||||||||||||||||||||||||
|
|
|
|
|
Re(ω) |
|
|
|
|
|
|
|
|
|
|
|
|
|
Im(ω) |
|
|
|
|
|
|
|
||||||
A(w) = |
|
|
|
= |
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
||||||||||||
Re2 (w)+ Im2 (w) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
( |
|
2 |
× w |
2 )2 |
|
2 |
× w |
2 |
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
Im(w) |
|
|
|
|
|
|
|
|
1 - T2 |
|
+ T1 |
|
|
|
|
||||||||||
j(w) = arctg |
= -arctg |
|
|
|
T1 × w |
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
Re(w) |
|
|
|
1 - T2 × w2 |
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
||||
1 вариант: аналитический.
T1 f 2T2 T1 p 2T2
T1 = 0
T1 = 2T2
При T1 = 2T2 (случай b) T2 = 0.5 , КЧХ – граница
T1
1.ω = 0 , j(0) = 0, А(0) = 1
2.ω → ∞ , j(¥) = -p , А(¥)® 0
3. j = - p |
, Re(w) = 0 Þ w |
π |
= |
1 |
|
T2 |
|||||
2 |
− |
2 |
|
1.0
t

Теория автоматического управления (лекции) п.п. all.doc |
27 |
|||||||||||
æ |
|
ö |
|
T1 |
T2 |
|
|
T2 |
|
|
||
|
|
|
|
|
|
|
|
|||||
Imç w |
|
÷ |
= |
|
|
|
= |
|
|
|||
|
|
|
|
2 |
|
|
||||||
ç |
− |
π ÷ |
|
æ T1 |
|
|
ö |
|
T1 |
|
||
è |
2 ø |
|
T |
|
|
|
||||||
|
|
|
ç |
÷ |
|
|
|
|
|
|||
|
|
|
è |
|
2 |
ø |
|
|
|
|
|
|
Резонанс при w = wсобств.
2 вариант: графический.
|
|
|
|
|
|
|
|
|
Wэкв (s) = |
Wa × Wи |
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
1 + Wa × Wи |
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
1. |
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
Сначала строятся КЧХ А-звена и КЧХ И- |
|||||||||
|
|
|
|
|
|
|
|
|
2. |
|
звена. |
|
|
|
|
w3 строится |
|||
|
|
|
|
|
|
|
|
|
|
При |
какой-то |
частоте |
|||||||
|
|
|
|
|
|
|
|
|
|
|
Wa × Wи |
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
→ |
|
−−−−−−−−→ |
|
|
|
|
|
|
|
|
|
3. складываются вектора |
1 |
и |
Wa × Wи , |
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
−−−−−−−−−−−−→ |
|
||
|
|
|
|
|
|
|
|
|
|
|
получается вектор 1 + Wa × |
Wи |
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
−−−−−−−−→ |
−−−−−−−−−−−−→ |
|
|||
|
|
|
|
|
|
|
|
|
4. делим |
Wa |
× Wи на 1 + Wa × |
Wи . При этом |
|||||||
|
|
|
|
|
|
|
|
|
|
|
аргументы вычитаются, а модули делятся. |
||||||||
|
|
|
5.5. Понятие о замкнутой и разомкнутой системах. |
|
|
|
|||||||||||||
|
|
|
|
Wзам(s) Y(s) |
По такой структуре строятся АСР, где |
|
|
|
|||||||||||
U(s) |
|
W (s) - передаточная функция объекта регулирования |
|||||||||||||||||
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
_ |
|
W1(s) |
|
W2(s) |
|
|
W1 (s)- передаточная функция регулятора |
|
|
||||||||||
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
Wзам |
(s) = |
Y(s) |
= |
|
W1 |
(s)× W2 (s) |
- замкнутая АСР |
||||||
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
U(s) |
1 |
+ W1 (s)× W2 (s) |
||||||||||
|
|
|
|
|
|
|
Если |
обратную |
связь |
разорвать, |
то |
получается |
|||||||
разомкнутая АСР.
Wраз (s) = YU((ss)) = W1 (s)× W2 (s)
Wзам (s) = Wраз (s() )
1 + Wраз s
−−−−→ |
|
−−→ |
æ |
|
−−→ |
ö |
|
Wзам (jw) = OC |
ç |
−−→ |
mod OA |
÷ |
|||
|
|
çmod OC = |
|
÷ |
|||
|
−−→ |
−−→ |
|||||
−−→ |
OA |
|
ç |
|
mod OB |
÷ |
|
OC = |
ç −−→ |
−−→ |
−−→ ÷ |
||||
−−→ |
|||||||
|
ç |
|
|
÷ |
|||
|
OB |
èargOC = argOA- argOBø |
|||||
6. Имитационное моделирование переходных процессов в ЛДС.
6.1. Замена дифференциального уравнения высокого порядка на соединение элементарных звеньев.
ПРИМЕР: (из расчетного задания).
x(t) |
|
y(s) |
Дифференциальное уравнение: |
|||||||
|
|
d3 y(t) |
d2 y(t) |
|
dy(t) |
|||||
|
т/о |
|
|
|
||||||
G, м3/ч |
|
A3 |
|
+ A2 |
|
|
+ A1 |
|
+ y(t) = B × x(t) |
|
|
Θ, ºС |
dt3 |
dt2 |
dt |
||||||
|
||||||||||
~ 500 |
|
~ 80ºС |
|
|
|
|
|
|
|
|
Теория автоматического управления (лекции) п.п. all.doc |
|
|
|
|
|
|
|
|
28 |
|||||||||||||||||||
|
é |
|
o |
|
ù |
- коэффициент усиления (задано ~ 1.0) |
|
|
|
|
|
|
||||||||||||||||
Вê |
м |
3С |
ú |
|
|
|
|
|
|
|||||||||||||||||||
|
ë |
|
чû |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
– на схеме изменяется температура на выходе подогреваемой среды при DGгор = 1 |
м3 |
|
||||||||||||||||||||||||||
ч |
|
|||||||||||||||||||||||||||
|
|
|
|
|
|
= Y(s) |
|
|
|
|
|
|
|
|
В |
|
|
|
|
|
|
|
|
|
|
|
||
W |
|
(s) |
|
= |
A |
×s3 |
+ A |
|
|
|
×s + 1 |
|
|
|
|
|
|
|
|
|
||||||||
|
об |
|
|
|
U(s) |
|
|
|
2 |
×s2 + A |
1 |
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
14444244443 |
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
[ ] |
|
|
|
|
|
|
|
|
|
|
|
|
Эквивалентная схема: 3 А-звена. |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
U(s) |
|
|
B |
|
|
|
|
|
|
|
|
1 |
|
|
|
1 |
y(s) |
|
|
|
|
|
|
|||||
|
|
|
|
|
|
T1 × s + 1 |
|
T2 × s + 1 |
|
|
|
T3 × s + 1 |
|
|
|
|
|
|
||||||||||
|
¢ |
(s) = |
|
|
|
|
|
|
В |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
Wоб |
(T1 × s + 1)× (T2 × s + 1)× (T3 × s + 1) |
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
Чтобы осуществить такую замену, необходимо найти Т1, Т2, Т3 (известны А1, А2, А3). |
|
|||||||||||||||||||||||||||
Т |
1 |
= - |
1 |
; Т |
2 |
= - 1 |
; Т |
3 |
|
= - 1 |
, где r ,r ,r |
- корни характеристического уравнения [*]. |
|
|||||||||||||||
|
|
|
|
|
r1 |
|
|
|
r2 |
|
|
r3 |
|
|
1 |
2 |
3 |
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Программа для MathCad: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
f (A3, A2, A1,r):= A3 × r3 |
+ A2 × r2 |
+ A1× r + 1 |
|
|
|
|
|
|
|
|
||||||||||||||||||
А3 := 40; |
А2 := 38; А1 := 11; |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
j := 0K100; rj |
|
:= 0.1j - 1; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
(Практически все корни в задании 0 ¸ (- 1)) |
|
|
|
|
|
|
|
|
||||||||||||||||||||
y j |
:= f (A3, A2, A1,rj ) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
+0.15 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
r1 |
|
|
|
|
r2 |
|
|
r3 |
|
|
|
|
|
|
|
Частный случай: r1 , r2 |
= r3 |
|||||
|
yj |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
r1 |
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
-0.15 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
r2= r3 |
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
rj |
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
-1.0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
6.2. Пример имитационного моделирования замкнутой АСР |
|
|
|||||||||||||||
Представим замкнутую АСР в виде структурной схемы из элементарных звеньев. |
|
|
||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
П |
|
μP |
|
|
λ(t) |
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
e(t) = U(t)- y3 (t) |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
U(t) |
|
|
|
ε(t) |
|
|
|
|
|
|
|
|
+ |
μ |
|
х1(t) |
|
y1(t) |
|
y2(t) |
y3(t) |
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
А1-зв. |
А2-зв. |
А3-зв. |
|
x1 (t) = m(t)+ l(t) |
||
|
|
|
|
_ |
|
|
|
|
|
|
|
|
|
|
|
+ |
|
|
_ |
|
|
|
|
Wобъект.(s) |
|
μ = μP + μI |
||
|
|
|
|
|
|
|
|
|
|
|
|
И |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
Wрег.(s) |
|
|
μI |
|
|
ООС |
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
А1-звено: W1 |
(s) = |
|
B |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
T1 |
× s + 1 |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
А2-звено: W2 |
(s) = |
|
B |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
T2 |
× s + 1 |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
А3-звено: W3 |
(s) = |
|
B |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
T3 |
× s + 1 |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||

Теория автоматического управления (лекции) п.п. all.doc |
|
|
|
|
29 |
||||||||||||||||||||
|
|
|
П - регулятор : Wп |
|
= kp |
|
|
ü |
|
|
|
|
|
|
|||||||||||
0.2 × Ти |
|
|
|
|
|
|
|
|
|
|
|
kp |
ï |
|
- регулятор |
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
ýПИ |
|
|||||||||||
|
|
|
И - регулятор : Wи |
= |
|
|
|
|
× tï |
|
|
|
|
|
|
||||||||||
|
|
|
|
Ти |
|
|
|
|
|
|
|||||||||||||||
Программа: |
|
|
|
|
|
|
|
|
|
|
þ |
|
|
|
|
|
|
||||||||
|
|
|
|
k1 := B |
k2 := 1 |
k3 := 1 |
|
||||||||||||||||||
Исходные данные объекта: |
, ( B = 0.8 - задано) |
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
T1 := 2 T2 := 4 T3 := 5 |
|
||||||||||||||
Разностные уравнения звеньев: |
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
æ |
|
|
|
|
dt |
|
ö |
|
dt |
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
ç |
1 - |
|
|
÷ |
|
× ka × X |
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
T |
+ T |
|
||||||||||
А-звено: fa (ka ,Ta ,dt, X,Y):= ç |
|
|
÷ × Y |
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
è |
|
|
|
|
a |
ø |
|
a |
|
|
||||
|
|
|
|
æ |
|
|
|
|
|
ö |
|
|
|
|
kр |
|
|
|
|
|
|
|
|
|
|
И-звено: f |
ç |
k ,T ,dt, X,Y |
÷ |
:= |
|
|
|
|
× dt × X + Y |
|
|
||||||||||||||
и ç |
÷ |
|
|
|
|
|
|
|
|||||||||||||||||
|
|
T |
|
|
|
|
|||||||||||||||||||
|
|
|
|
1р44и 2443 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
ç |
параметры расчета |
|
÷ |
|
|
|
|
и |
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
è |
|
ø |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
П-звено: fр (kр , X):= kр × X |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
te := 60 , N := 6000- число точек, |
[N = 100 × t], t – время. |
||||||||||||||||||||||||
dt := |
te |
- шаг, j := 0KN |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
N |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
t j := dt × j - текущее время |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
m0 |
¬ 0 ü |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
mI0 ¬ 0 |
ï |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
ï |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
e0 |
¬ 0 |
ï |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
y10 |
¬ 0 |
ýнулевые начальные условия |
|||||||||||||||||
|
|
|
|
|
|
ï |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
y2 |
0 |
¬ 0ï |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ï |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ï |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
y30 ¬ 0þ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
for |
jÎ 0K |
te |
|
|
|
|
|
|
|
|
|
|
|
|
|||||
P(kp ,Tи ,l,U):= |
dt |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
xj+1 |
¬ l + mj |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
y1j+1 ¬ fa (k1,T1,dt,xj+1 ,y1j ) |
|
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
y2j+1 ¬ fa |
(k2,T2,dt,y1j+1 ,y2j ) |
|
|||||||||||||||||
|
|
|
|
|
|
y3j+1 ¬ fa |
(k3,T3,dt,y2j+1 ,y3j ) |
|
|||||||||||||||||
|
|
|
|
|
|
ej+1 ¬ U - y3j+1 |
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
mPj+1 ¬ fp |
(kp ,ej+1 ) |
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
mI j+1 ¬ fи (kp ,Ти ,dt,ej+1 ,mPj+1 ) |
|
||||||||||||||||||
|
|
|
|
|
|
m j+1 ¬ mPj+1 + mI j+1 |
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
y3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
V1 := P(0,1000,1,0) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
V1j
B
0 |
tj |
60 |

Теория автоматического управления (лекции) п.п. all.doc |
30 |
7. Устойчивость ЛДС.
7.1. Понятие об устойчивости.
Аксиома 1: Устойчивость определяется внутренним состоянием ДС. Аксиома 2: Устойчивость не является абсолютным свойством ДС.
ПРИМЕР:
а) устойчивая ДС б) нейтральная ДС в) неустойчивая ДС.
y(t) |
В данном случае внутренним состоянием системы является форма |
поверхности. |
|
|
- граница |
t- устойчивая - неустойчивая
х(t)
у(t)
Если подать на вход сигнал:
x(t) – правая часть диф. уравнения, описывающего ЛДС. Систему можно отрегулировать так, чтобы она была устойчива.
Устойчивость – свойство ДС возвращаться в исходное состояние после снятия действующих на нее возмущений.
t Устойчивость определяет свободное движение системы усвоб (t)
усвоб (t) = åCi × erit i=1
Свободное движение системы зависит от корней характеристического уравнения.
Прямой метод оценки устойчивости – решение дифференциального t уравнения усвоб (t)
7.2. Косвенные методы оценки устойчивости ЛДС.
7.2.1. По корням характеристического уравнения ЛДС.
Дифференциальное уравнение → характеристическое уравнение → корни |
|
|
|
||
Корни в общем виде: r1,2 = ±a ± jw |
|
||||
1. |
Корни |
вещественны, |
отрицательны |
||
|
(- a1 ,-a2 ,K). |
|
|
|
|
|
ЛДС – устойчивая без колебаний. |
|
|||
2. |
Комплексные |
(- a ± jw) |
с |
||
|
отрицательной вещественной частью. |
|
|||
|
ЛДС устойчива с колебаниями. |
|
|||
3. |
Один из корней равен 0. |
|
|
||
4. |
ЛДС нейтральная. |
|
|
|
|
Корни |
мнимые |
→ |
незатухающие |
||
|
колебания → граница устойчивости. |
|
|||