

Приклади виконання завдання к-7
Умова задач 1, 2, 3.
Точка М рухається відносно тіла D. По заданим рівнянням відносного руху точки М і руху тіла D визначити для моменту часу t=t1 абсолютну швидкість і абсолютне прискорення точки М.
Задача 1.
Дано:
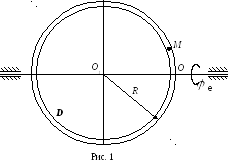
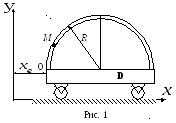
схема механізму (рис.1),
![]() см, R=30
см,
см, R=30
см,
![]() рад,
рад,
![]() с. Положення точки М на схемі
відповідає додатному значенню
с. Положення точки М на схемі
відповідає додатному значенню
![]() .
.
|
|
Розв’язання. 1.Будемо вважати, що в заданий момент часу площина рисунка збігається з площиною круга D. Знайдемо положення точки М на тілі D в заданий момент часу.
При
Положення точки М
на тілі D
визначається центральним кутом α між
двома радіусами, що стягують дугу ОМ
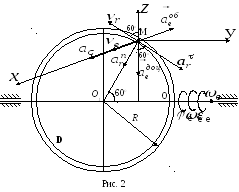
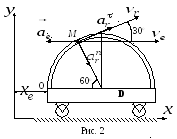
Положення точки М і тіла D в заданий момент часу показані на рис.2. 2. Визначення абсолютної швидкості точки М. Абсолютну
швидкість точки М
знайдемо за теоремою про додавання
швидкостей:
Відносна швидкість точки М: |
|
|
![]() при
при
![]() с
с ![]() см/с. Додатний знак у
см/с. Додатний знак у
![]() показує, що вектор
показує, що вектор
![]() напрямлений в бік зростання дугової
координати
напрямлений в бік зростання дугової
координати
![]() .
.
Переносна швидкість точки М:
![]() см/с,
см/с,
![]() ,
,
![]() при
при
![]() с
с ![]() рад/с,
рад/с,
![]() см, МК
– відстань від точки М
до осі обертання.
см, МК
– відстань від точки М
до осі обертання.
Оскільки вектори відносної і переносної швидкостей взаємно перпендикулярні, то модуль абсолютної швидкості точки М дорівнює:
![]() см/с.
см/с.
3. Визначення абсолютного прискорення точки М.
Абсолютне прискорення точки М знайдемо за теоремою про додавання прискорень:
![]() (2)
(2)
Відносне дотичне прискорення точки М:
![]() при
при
![]() с
с ![]() см/с2.
см/с2.
Різні знаки для
![]() і
і
![]() показують,
що відносний рух точки М
сповільнений.
показують,
що відносний рух точки М
сповільнений.
![]() см/с2.
см/с2.
Відносне нормальне прискорення точки М:
![]() см/с2.
см/с2.
Переносне доцентрове прискорення точки М:
![]() см/с2.
см/с2.
Переносне обертальне прискорення точки М:
![]() см/с2,
см/с2, ![]() ,
,
![]() ,
,
![]() рад/с2.
рад/с2.
Різні знаки для
![]() і
і
![]() показують, що обертання тіла D
навколо осі сповільнене.
показують, що обертання тіла D
навколо осі сповільнене.
Модуль коріолісового прискорення точки М:
![]() рад/с2,
рад/с2,
![]() ,
,
![]() .
.
Вектор
![]() напрямлений згідно з правилом
векторного добутку.
напрямлений згідно з правилом
векторного добутку.
Всі вектори, що входять до розрахункової формули (2) показані на рис.2.
Модуль абсолютного прискорення точки М знаходимо способом проекцій. Спроектуємо векторну рівність (2) на координатні осі х,у,z (рис.2):
![]() см/с2,
см/с2,
![]() см/с2,
см/с2,
![]() см/с2,
см/с2,
![]() см/с2.
см/с2.
Відповідь:
![]() =
100,0 см/с,
=
100,0 см/с, ![]() =369,2
см/с2.
=369,2
см/с2.
Задача 2.
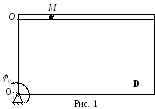
Дано: схема механізму (рис.1),
![]() см, t=1 с,
О1О=3
см.
см, t=1 с,
О1О=3
см.
Розв’язання.
1. Визначимо положення точки М на тілі D в заданий момент часу.
При t=1
с
![]() см.
см.
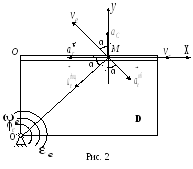
Положення точки М і тіла D в заданий момент часу показані на рис.2.
|
|
2. Визначення абсолютної швидкості точки М.
З трикутника О1ОМ: О1М=5 см
|
|
|
Спроектуємо векторну
рівність (1) на осі х
і у:
|
||
|
|
3. Визначення абсолютного прискорення точки М:
(2)
|
|
![]() см/с2,
см/с2,
![]() ,
,
вектор
![]() до площини рисунка і напрямлений до
нас.
до площини рисунка і напрямлений до
нас.
Спроектуємо векторну рівність (2) на осі х і у:
![]() см/с2,
см/с2,
![]() см/с2,
см/с2,
![]() см/с2.
см/с2.
Відповідь:
![]() =
4,1 см/с;
=
4,1 см/с;
![]() =7,3
см/с2.
=7,3
см/с2.
Задача 3.
Дано: схема (рис.1), ![]() см, R=15
см,
см, R=15
см, ![]() см, t=
1с.
см, t=
1с.
|
|
|
Розв’язання.
Відносний рух точки – це криволінійний рух точки М по дузі кола радіуса R. Переносним рухом для точки М є прямолінійний поступальний рух тіла D уздовж осі х.
1. Визначимо положення точки М на тілі D в заданий момент часу.
При t=
1 с
![]() см,
см,
![]() ,
,
![]() .
.
Положення точки М показано на рис.2.
2. Визначення абсолютної швидкості точки М.
![]() (1)
(1)
![]() при
при
![]() с
с ![]() см/с,
см/с, ![]() ,
,
![]() при
при
![]() с
с ![]() см/с,
см/с, ![]() .
.
Спроектуємо векторну рівність (1)на осі х і у:
![]() см/с,
см/с,
![]() см/с,
см/с,
![]() см/с.
см/с.
3.Визначення абсолютного прискорення точки М:
![]() (2)
(2)
![]() см/с2,
см/с2,
![]() см/с2,
см/с2,
![]() ,
,
![]() см/с2,
см/с2,
![]() ,
переносний рух поступальний,
,
переносний рух поступальний,
![]() .
.
Спроектуємо векторну рівність (2) на осі х і у:
![]() см/с2,
см/с2,
![]() см/с2,
см/с2,
![]() см/с2.
см/с2.
Відповідь:
![]() =
36,7 см/с,
=
36,7 см/с,
![]() =69,5
см/с2.
=69,5
см/с2.
|
ДОНБАСЬКА НАЦІОНАЛЬНА АКАДЕМІЯ БУДІВНИЦТВА І АРХІТЕКТУРИ
Секція «Теоретична механіка»
РОЗРАХУНКОВО-ГРАФІЧНА РОБОТА № 4
ДИНАМІКА
Д-1 Інтегрування диференціальних рівнянь руху матеріальної точки, яка знаходиться під дією сталих сил
Д-6 Застосування основних теорем динаміки до дослідження руху матеріальної точки
Д-10 Застосування теореми про зміну кінетичної енергії до вивчення руху механічної системи
Варіант №_________________ Виконав студент групи ___ __________________________ Перевірив_________________
Макіївка 2009 |