

Приклади виконання завдання к-3.
Умова задач 1, 2, 3. Знайти для заданого положення механізму швидкості і прискорення точок В і С, а також кутову швидкість і кутове прискорення ланки, якій ці точки належать.
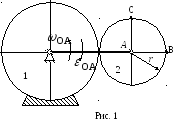
Задача 1.
Дано: схема механізму в заданому положенні (рис.1); ОА=10 см, АВ=20 см,
АС=10
см,
![]() =2
рад/с,
=2
рад/с,
![]() =3
рад/с2.
=3
рад/с2.
|
|
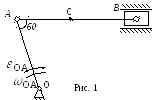
Розв’язання. Тіло ОА здійснює обертальний рух навколо нерухомої осі О. Тіло АВ здійснює плоско паралельний рух. Повзун В здійснює прямолінійний поступальний рух вздовж горизонтальної напрямної. Таким чином, вектори швидкості і прискорення точки В будуть напрямлені вздовж горизонтальної напрямної.
|
Знайдемо швидкість точки А:
Миттєвий центр швидкостей PAB ланки АВ знаходиться в точці перетину перпендикулярів, проведених з точок А і В до векторів швидкостей цих точок. Знайдемо відстань від точок А, В і С до миттєвого центра швидкостей PAB. З трикутника АВРАВ:
|
|
|
|
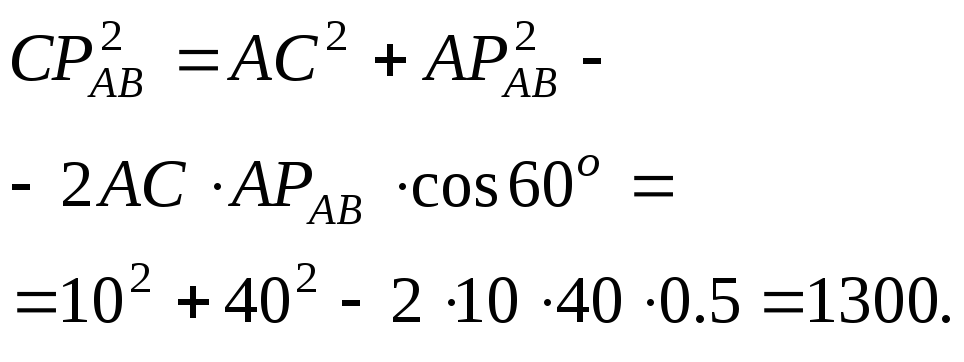
З трикутника АСРАВ знайдемо СРАВ за теоремою косинусів:
Знайдемо кутову швидкість ланки АВ:
Швидкості точок В і С:
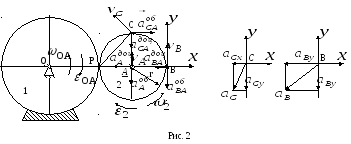
2. Визначення прискорень точок В і С і кутового прискорення ланки АВ (рис.2). Знайдемо прискорення точки А:
Згідно з теоремою про прискорення точок плоскої фігури:
|
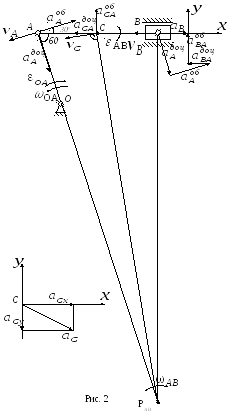
![]() . (1)
. (1)
Знайдемо числові значення векторів прискорень:
![]() см/с2,
см/с2,
![]() см/с2,
см/с2,
![]() см/с2,
см/с2,
![]() .
.
Вектор
![]() направлений
від точки А
до осі обертання О.
Вектор
направлений
від точки А
до осі обертання О.
Вектор
![]() направлений
перпендикулярно до ОА
в напрямку
направлений
перпендикулярно до ОА
в напрямку
![]() .
Вектор
.
Вектор
![]() напрямлений
від точки В
до полюса А.
Вектор
напрямлений
від точки В
до полюса А.
Вектор
![]() перпендикулярний
до прямої АВ.
Вектор
перпендикулярний
до прямої АВ.
Вектор
![]() лежить
на горизонтальній напрямній. Побудуємо
в точці В
векторний многокутник згідно з векторною
рівністю (1) (рис.2).
лежить
на горизонтальній напрямній. Побудуємо
в точці В
векторний многокутник згідно з векторною
рівністю (1) (рис.2).
Виберемо осі координат, як показано на рис.2, і спроектуємо векторну рівність (1) на ці осі:
![]() (2)
(2)
![]() (3)
(3)
З рівності (2): ![]() см/с2.
см/с2.
З рівності (3): ![]() см/с2.
см/с2.
Кутове прискорення ланки
АВ: 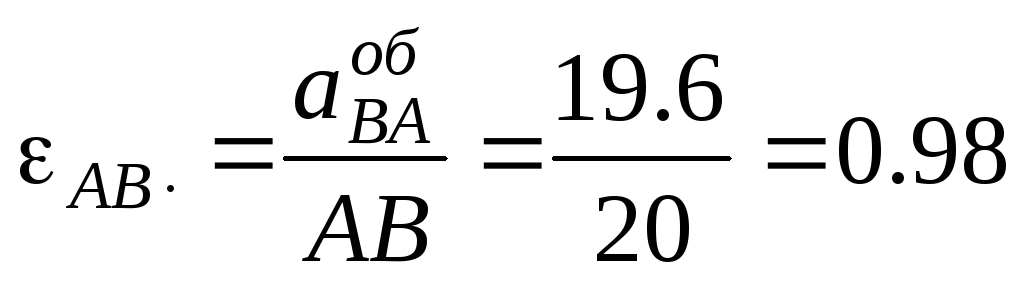 рад/с2.
рад/с2.
Напрям прискорення
![]() відносно полюса А
визначає напрям кутового прискорення
відносно полюса А
визначає напрям кутового прискорення
![]() (рис.2). В нашому випадку
(рис.2). В нашому випадку
![]() і
і
![]() мають однаковий напрям (проти руху
стрілки годинника), тобто ланка АВ
обертається прискорено. Вектори швидкості
і прискорення точки В
мають протилежні напрямки (рис.2), тобто
повзун В
рухається сповільнено.
мають однаковий напрям (проти руху
стрілки годинника), тобто ланка АВ
обертається прискорено. Вектори швидкості
і прискорення точки В
мають протилежні напрямки (рис.2), тобто
повзун В
рухається сповільнено.
Визначимо прискорення точки С:
![]() , (4)
, (4)
![]() см/с2,
см/с2, ![]() см/с2,
см/с2,
![]() см/с2,
см/с2, ![]() см/с2.
см/с2.
. Прискорення точки С знаходимо способом проекцій. Спроектуємо векторну рівність (4) на осі х і у :
![]() см/с2
см/с2
![]() см/с2
см/с2
![]() см/с2
см/с2
Вектор прискорення точки С будуємо по його проекціях (рис.2).
Відповідь: ![]() =17,3
см/с;
=17,3
см/с; ![]() =41,0
см/с2;
=41,0
см/с2;
![]() =18
см/с;
=18
см/с; ![]() =44,6
см/с2;
=44,6
см/с2;
![]() =0,5
рад/с;
=0,5
рад/с; ![]() =0,98
рад/с2.
=0,98
рад/с2.
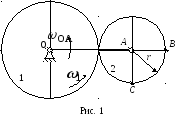
Задача 2.
Дано: схема механізму в
заданому положенні (рис.1); колесо 1
нерухоме; колесо 2 котиться без ковзання;
ОА=30
см, r=10 см,
![]() =2
рад/с,
=2
рад/с,
![]() =3
рад/с2.
=3
рад/с2.
|
|
|
|
Розв’язання.
1. Визначення швидкостей точок В і С і кутової швидкості колеса 2 (рис.2).
Знайдемо швидкість точки
А:
![]() cм/с,
cм/с,
![]() .
.
Колесо 2 котиться без ковзання
по нерухомій поверхні колеса 1. Миттєвий
центр швидкостей колеса 2 знаходиться
в точці Р
(рис.2). Знайдемо кутову швидкість колеса
2:
![]() ,
,
![]() рад/с.
рад/с.
Відстані від точок В і С до миттєвого центра швидкостей, точки Р:
BP=2·r=20
см, С![]() см.
см.
Швидкості точок В і С:
![]() см/с,
см/с,
![]()
![]() см/с.
см/с.
![]() .
.
2. Визначення прискорень точок В і С і кутового прискорення колеса 2 (рис.2).
Знайдемо прискорення точки А:
![]() ,
,
![]() см/с2,
см/с2,
![]() см/с2,
см/с2, ![]() .
.
Згідно з теоремою про прискорення точок плоскої фігури:
![]() . (1)
. (1)
Знайдемо числові значення векторів прискорень:
![]() см/с2,
см/с2,
![]() см/с2,
см/с2,
![]() см/с2,
см/с2, ![]() см/с2,
см/с2,
![]() ,
,
![]() рад/с2.
рад/с2.
Прискорення точки В знаходимо способом проекцій. Спроектуємо векторну рівність (1) на осі х і у (рис.2):
![]() см/с2,
см/с2,![]()
![]() см/с2,
см/с2,
![]() см/с2.
см/с2.
Згідно з теоремою про прискорення точок плоскої фігури:
![]() , (2)
, (2)
![]() см/с2,
см/с2, ![]() см/с2,
см/с2,
![]() см/с2,
см/с2, ![]() см/с2.
см/с2.
Спроектуємо векторну рівність (2) на осі х і у (рис.2):
![]() см/с2,
см/с2,
![]() см/с2,
см/с2,
![]() см/с2.
см/с2.
Вектори прискорень точок В і С будуємо по їх проекціях (рис.2).
Відповідь:
![]() =120
см/с;
=120
см/с; ![]() =512,6
см/с2;
=512,6
см/с2;
![]() =84,6
см/с;
=84,6
см/с; ![]() =451,0
см/с2;
=451,0
см/с2;
![]() =6
рад/с;
=6
рад/с; ![]() =9
рад/с2.
=9
рад/с2.
Задача 3.
Дано: схема механізму в
заданому положенні (рис.1); ОА=30
см, r=10 см,
![]() =2
рад/с,
=2
рад/с,
![]() =0,
=0,
![]() =4,5
рад/с,
=4,5
рад/с,
![]() =0.
=0.
|
|
|
|
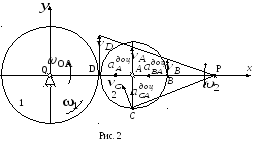
1. Визначення швидкостей точок В і С і кутової швидкості колеса 2 (рис.2).
Знайдемо швидкості точок А і D:
![]() см/с,
см/с, ![]() см/с.
см/с.
Миттєвий центр швидкостей колеса 2 знаходиться в точці Р (рис.2).
Знайдемо кутову швидкість колеса 2:
![]() ,
,
![]() ,
,
![]() рад/с,
рад/с,
![]() см, BP=AP-r=20-10=10
см,
см, BP=AP-r=20-10=10
см,
![]() см.
см.
Швидкості точок В і С:
![]() см/с,
см/с, ![]() см/с,
см/с,
![]() .
.
2. Визначення прискорень точок В і С і кутового прискорення колеса 2 (рис.2).
Знайдемо прискорення точки А:
![]() ,
,
![]() см/с2,
см/с2, ![]() ,
, ![]() см/с2.
см/с2.
Згідно з теоремою про прискорення точок плоскої фігури:
![]() ,
(1)
,
(1)
![]() ,
,
![]() см/с2,
см/с2,
![]() см/с2,
см/с2, ![]() ,
,
![]() .
.
Спроектуємо векторну рівність (2) на осі х і у (рис.2):
![]() см/с2,
см/с2, ![]() ,
,
![]() см/с2.
см/с2.
Згідно з теоремою про прискорення точок плоскої фігури:
![]() , (2)
, (2)
![]() ,
,
![]() см/с2,
см/с2, ![]() см/с2,
см/с2, ![]() .
.
Спроектуємо векторну рівність (2) на осі х і у (рис.2):
![]() см/с2,
см/с2, ![]() см/с2,
см/с2,
![]() см/с2.
см/с2.
Вектори прискорень точок В і С можна побудувати по їх проекціях на осі х і у.
Відповідь:
![]() =30
см/с;
=30
см/с; ![]() =210
см/с2;
=210
см/с2;
![]() =67,2
см/с;
=67,2
см/с; ![]() =150
см/с2;
=150
см/с2;
![]() =3
рад/с;
=3
рад/с; ![]() =0.
=0.
Короткі відомості з теорії і методичні вказівки,
необхідні для виконання завдання К-7
Визначення абсолютної швидкості і
абсолютного прискорення точки
Складний рух точки
Складний рух точки – це такий рух точки, який досліджується одночасно в нерухомій і рухомій системах координат.
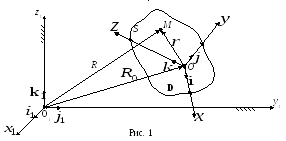 Розглянемо
рух точки М відносно системи рухомих
осей координат Охуz,
які в свою чергу рухаються відносно
осей О1х1у1z1.
Систему осей О1х1у1z1
вважатимемо
нерухомою (рис.1). Рухома система координат
Охуz
жорстко зв’язана з
тілом D
по якому рухається точка М.
Розглянемо
рух точки М відносно системи рухомих
осей координат Охуz,
які в свою чергу рухаються відносно
осей О1х1у1z1.
Систему осей О1х1у1z1
вважатимемо
нерухомою (рис.1). Рухома система координат
Охуz
жорстко зв’язана з
тілом D
по якому рухається точка М.
|
|
1. Рух точки М відносно нерухомих осей координат О1х1у1z1.називається абсолютним рухом.
Рівняння абсолютного руху
точки М:
![]() .
.
Абсолютною траєкторією точки М називають її траєкторію відносно нерухомих осей координат.
Абсолютною швидкістю
![]() і абсолютним прискоренням
і абсолютним прискоренням
![]() точки М
називають швидкість і прискорення точки
відносно нерухомої системи координат.
точки М
називають швидкість і прискорення точки
відносно нерухомої системи координат.
2. Рух точки М
відносно рухомої системи координат
Охуz
називається відносним рухом. Рівняння
відносного руху точки М:
![]() ..
..
Відносною траєкторією точки М називають її траєкторію відносно рухомої системи координат.
Відносною швидкістю
![]() і
відносним прискоренням
і
відносним прискоренням
![]() точки
М
називають швидкість і прискорення точки
відносно рухомої системи координат
(від лат. relativus-
відносний).
точки
М
називають швидкість і прискорення точки
відносно рухомої системи координат
(від лат. relativus-
відносний).
3. Переносним рухом точки М називається рух відносно нерухомої системи координат тієї точки рухомої системи координат, з якою в даний момент збігається точка, що рухається.
Переносною швидкістю
![]() і
переносним прискоренням
і
переносним прискоренням
![]() точки
М
називають швидкість і прискорення тієї
точки рухомої системи координат, з якою
в даний момент часу збігається точка,
що рухається (від лат. entainer-
переносити).
точки
М
називають швидкість і прискорення тієї
точки рухомої системи координат, з якою
в даний момент часу збігається точка,
що рухається (від лат. entainer-
переносити).
4. Основна задача складного руху точки полягає в тому, щоб встановити залежності між кінематичними характеристиками абсолютного, відносного і переносного рухів.
Теорема про додавання швидкостей
Теорема. Абсолютна швидкість точки при її складному русі дорівнює векторній сумі відносної і переносної швидкостей
![]()
(1)
Теорема про додавання прискорень
(теорема Коріоліса)
Теорема. Абсолютне прискорення точки при її складному русі дорівнює векторній сумі відносного, переносного та коріолісового прискорень.
![]()
(2)
Модуль і напрям коріолісового прискорення
Коріолісове прискорення визначається за формулою
![]()
(3)
де
![]() –
вектор кутової швидкості переносного
руху;
–
вектор кутової швидкості переносного
руху;
![]() –
вектор відносної швидкості точки.
–
вектор відносної швидкості точки.
Коріолісове прискорення є результатом взаємного впливу двох рухів – переносного і відносного.
Модуль коріолісового прискорення визначається за формулою:
![]()
Напрям коріолісового прискорення знаходять за правилом визначення напряму векторного добутку (3).
Коріолісове прискорення може дорівнювати нулю в трьох випадках:
-
якщо
 ,
тобто при поступальному переносному
русі;
,
тобто при поступальному переносному
русі; -
якщо
 ,
тобто відсутній відносний рух;
,
тобто відсутній відносний рух; -
якщо
 ,
тобто якщо вектори
,
тобто якщо вектори
 і
і
 паралельні.
паралельні.
Визначення відносної швидкості і відносного прискорення точки М
-
Якщо відносний рух точки заданий координатним способом, то:
![]() ,
,
![]() .
.
2. Якщо відносний рух точки заданий природним способом, то:
![]() ,
,
![]() ,
,
![]() ,
,
![]() .
.
Визначення переносної швидкості і переносного прискорення точки М
-
Якщо переносний рух поступальний (дивись рис.1), то:
![]() ,
,
![]() .
.
-
Якщо переносний рух обертальний, то:
![]() ,
,
![]() ,
,
![]() ,
,
![]() .
.
де МК – найкоротша відстань від точки М до осі обертання.
Модуль і напрям абсолютного прискорення точки М
Для визначення абсолютного прискорення застосовують метод проекцій. Для цього необхідно побудувати прямокутну систему осей з початком в точці М і проектуючи рівність (2) на кожну з цих осей, знаходимо:
![]() ,
, ![]() ,
, ![]() .
.
Модуль абсолютного прискорення точки М знаходимо за формулою:
![]() .
.
Напрям вектора абсолютного прискорення точки М знаходимо за напрямними косинусами:
![]() ,
,
![]() ,
,
![]() .
.