

3.5. Теорема об изменении кинетической энергии точки.
Рассмотрим точку массой m, перемещающуюся под действием приложенных к ней сил из положения М0, где она имела скорость V0 в положение М1, где ее скорость V1.
Основной закон динамики
![]() .
.
Проектируем
обе части равенства на касательную
![]() к траектории точки М,
направленную в сторону движения получим:
к траектории точки М,
направленную в сторону движения получим:
![]() .
.
Ускорение представим в виде
![]() .
.
В результате имеем:
![]() .
.
Умножим обе части этого равенства на dS, внесем m под знак дифференциала.
Тогда замечая,
что
![]() ,
где
,
где
![]() - элементарная работа силы
- элементарная работа силы
![]() ,
получаем выражение теоремы об изменении
кинетической энергии в дифференциальной
форме:
,
получаем выражение теоремы об изменении
кинетической энергии в дифференциальной
форме:
![]() (26)
(26)
Проинтегрировав обе части этого равенства в пределах соответствующих значений переменных в точках М0 и М1 получим
![]() (27)
(27)
Уравнение (27) выражает теорему об изменении кинетической энергии в конечном виде: изменении кинетической энергии точки при некотором ее перемещении равно алгебраической сумме работ всех действующих на точку сил на том же перемещении.
3.6. Теорема об изменении момента количества движения (теорема моментов).
Иногда при
изучении движения точки вместо изменения
самого вектора (m![]() )
оказывается необходимым рассматривать
изменение его момента. Момент вектора
m
)
оказывается необходимым рассматривать
изменение его момента. Момент вектора
m![]() относительно данного центра О
или оси z
обозначается
относительно данного центра О
или оси z
обозначается
![]() и
и
![]() и называется моментом количества
движения или кинетическим моментом
точки относительно этого центра (оси).
Вычисляется момент вектора m
и называется моментом количества
движения или кинетическим моментом
точки относительно этого центра (оси).
Вычисляется момент вектора m![]() так же, как и момент силы. При этом вектор
m
так же, как и момент силы. При этом вектор
m![]() считается приложенным к движущей точке.
По модулю
считается приложенным к движущей точке.
По модулю
![]() ,
где h
– длина перпендикуляра, опущенного из
центра О
на направление вектора m
,
где h
– длина перпендикуляра, опущенного из
центра О
на направление вектора m![]() .
.
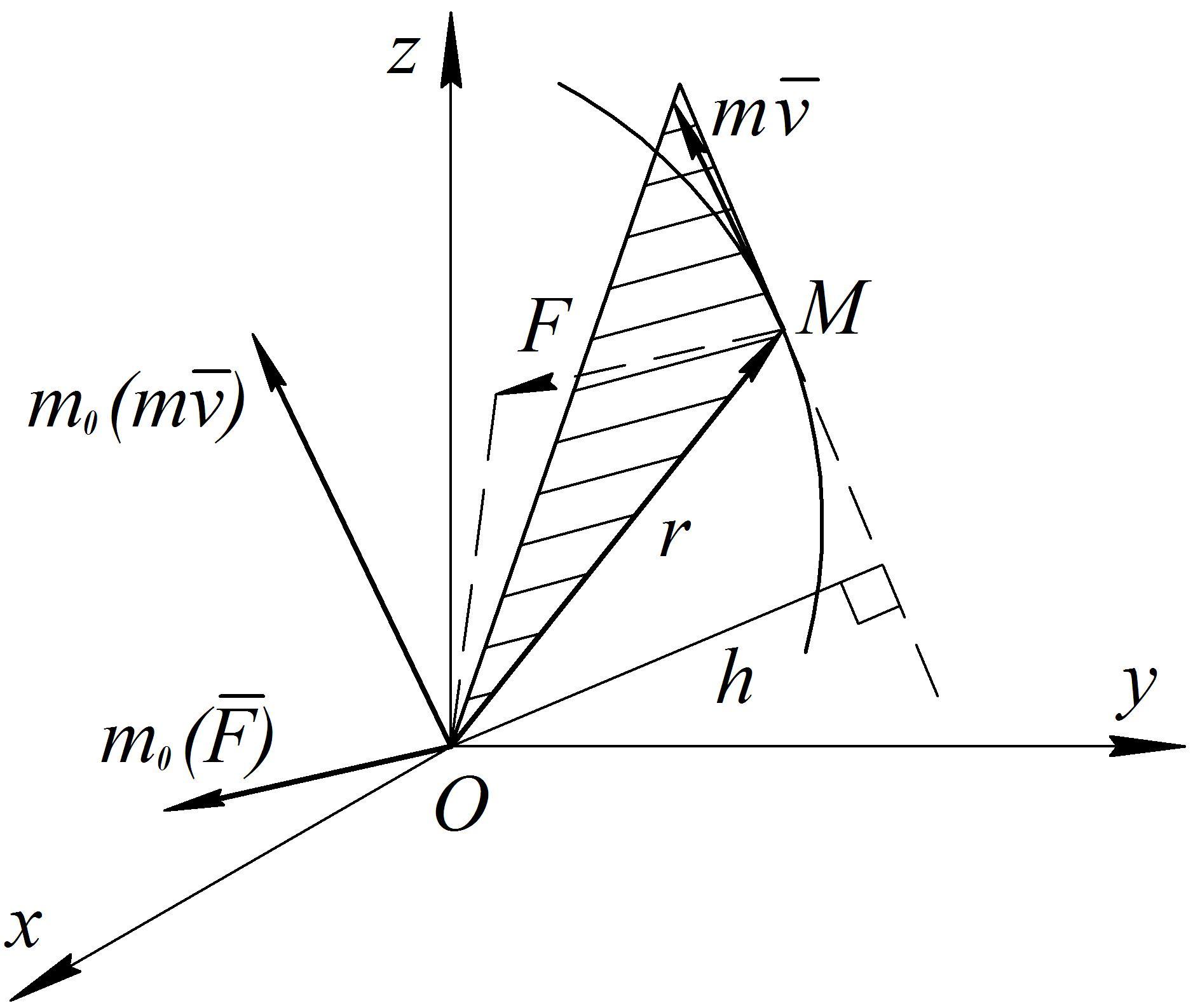
Рис. 3.6
Теорема моментов относительно оси.
Рассмотрим
материальную точку массы m,
движущуюся под действием силы
![]() .
Найдем для нее зависимость между
моментами векторов m
.
Найдем для нее зависимость между
моментами векторов m![]() и
и
![]() относительно какой-либо неподвижной
оси z.
По полученным ранее формулам (статика)
относительно какой-либо неподвижной
оси z.
По полученным ранее формулам (статика)
![]() (*)
(*)
Аналогично и для
момента
![]() ,
если вынести m
за скобку
,
если вынести m
за скобку
![]() .
.
Беря от обеих частей этого равенства производные по времени, находим:
![]() .
.
В первой части
первая скобка равна 0, так как
![]() .
.
Вторая скобка
согласно формуле (*) равна
![]() ,
так как по основному закону динамики
,
так как по основному закону динамики
![]() .
.
Окончательно имеем
![]() (28)
(28)
Полученное уравнение выражает теорему моментов относительно оси: производная по времени от момента количества движения точки относительно какой-нибудь оси равна моменту действующей силы относительно той же оси.
Из уравнения
(28) следует, если
![]() ,
то
,
то
![]() .
.
Теорема моментов относительно центра.
Ранее было показано, что
![]()
Аналогично
![]() .
.
При этом вектор
![]() направлен
перпендикулярно плоскости, проходящей
через центр О и вектор
направлен
перпендикулярно плоскости, проходящей
через центр О и вектор
![]() ,
а вектор
,
а вектор
![]() -
перпендикулярен плоскости, проходящей
через центр О и вектор
-
перпендикулярен плоскости, проходящей
через центр О и вектор
![]() .
.
Дифференцируем
выражение
![]() по времени:
по времени:
![]() ,
,
но
![]() ,
как вектор производной двух параллельных
векторов,
,
как вектор производной двух параллельных
векторов,
![]() .
Следовательно
.
Следовательно
![]()
или
![]() (29)
(29)
Теорема моментов.
Производная по времени от момента количества движения точки, взятого относительно какого-либо неподвижного центра, равна моменту действующей на точку силы относительно того же центра.