

Уравнения равномерного вращения тела
Вращение тела с постоянной угловой скоростью называется равномерным
![]()
Проинтегрируем
![]()
![]() – уравнение
равномерного вращения тела.
– уравнение
равномерного вращения тела.
Уравнения равнопеременного вращения тела
Вращение тела, при котором угловое ускорение постоянно, называется равнопеременным вращением.
Если величина
![]() увеличивается, то вращение называется
равноускоренным, если уменьшается –
равнозамедленным.
увеличивается, то вращение называется
равноускоренным, если уменьшается –
равнозамедленным.
![]()
Разделим переменные:
![]()
Проинтегрируем:
![]()
Разделим переменные:
![]()
Проинтегрируем:
В результате
получим:
![]()
В общем случае:
![]() – уравнение
равнопеременного движения.
– уравнение
равнопеременного движения.
Знак «+» – соответствует ускоренному вращению,
«–» – замедленному.
3.2.1. Скорость и ускорение точки твердого тела, вращающегося вокруг неподвижной оси.
Р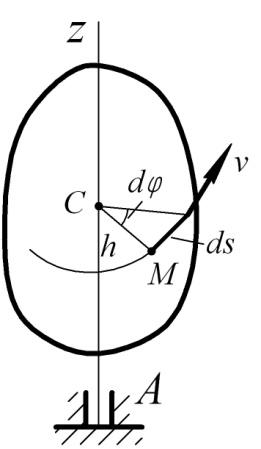 ассмотрим
точку М, находящуюся на расстоянии h
от оси вращения Аz.
ассмотрим
точку М, находящуюся на расстоянии h
от оси вращения Аz.
При вращении точка
М будет описывать окружность радиуса
h,
плоскость которой перпендикулярна к
оси вращения, а центр С лежит на самой
оси. Если за время
![]() происходит элементарный поворот тела
на угол
происходит элементарный поворот тела
на угол
![]() ,
то точка М при этом совершит вдоль своей
траектории элементарное перемещение
,
то точка М при этом совершит вдоль своей
траектории элементарное перемещение
![]() .
Тогда скорость точки будет равна
.
Тогда скорость точки будет равна
Рис. 2.10
![]() или
или
![]() (21)
(21)
Скорость
![]() называют еще линейной или окружной
скоростью точки М.
называют еще линейной или окружной
скоростью точки М.
Направлена линейная скорость по касательной к описываемой точкой М окружности.
Как следует из формулы, линейные скорости точек вращающегося тела пропорциональны их расстояниям от оси вращения.
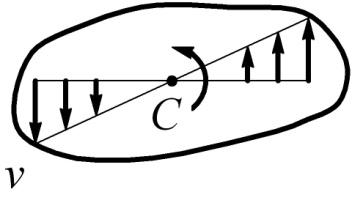
Рис. 2.11
Для нахождения ускорения точки М воспользуемся формулами:
![]()
В нашем случае
![]() .
Подставляя сюда значение
.
Подставляя сюда значение
![]() ,
получим:
,
получим:
![]()
или окончательно
![]()
К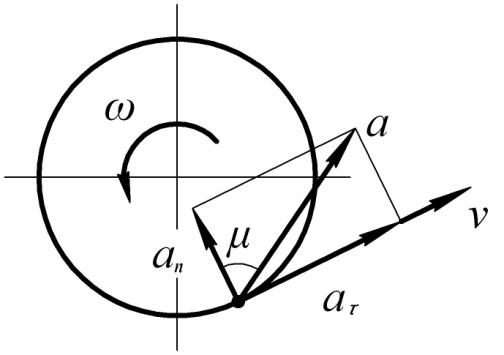 асательное
ускорение
асательное
ускорение
![]() направлено по касательной к траектории
(в сторону движения, если тело вращается
ускоренно или в обратную, если тело
вращается замедленно); нормальное
направлено по касательной к траектории
(в сторону движения, если тело вращается
ускоренно или в обратную, если тело
вращается замедленно); нормальное
![]() всегда направлено по радиусу h
к оси вращения.
всегда направлено по радиусу h
к оси вращения.
Рис. 2.12
Полное ускорение точки М будет равно
![]() или
или
![]() (23)
(23)
Отклонение вектора
полного ускорения от радиуса описываемой
точкой окружности определяется углом
![]() ,
который вычисляется по формуле
,
который вычисляется по формуле
![]()
Подставляя сюда
значения
![]() и
и
![]() ,
получаем:
,
получаем:
![]()
-
Сложное движение точки.
4.1. Основные понятия.
Сложное движение называется движение точки относительно двух систем отсчета, одна из которых неподвижна, другая произвольно перемещается относительно неподвижной системы координат.
Д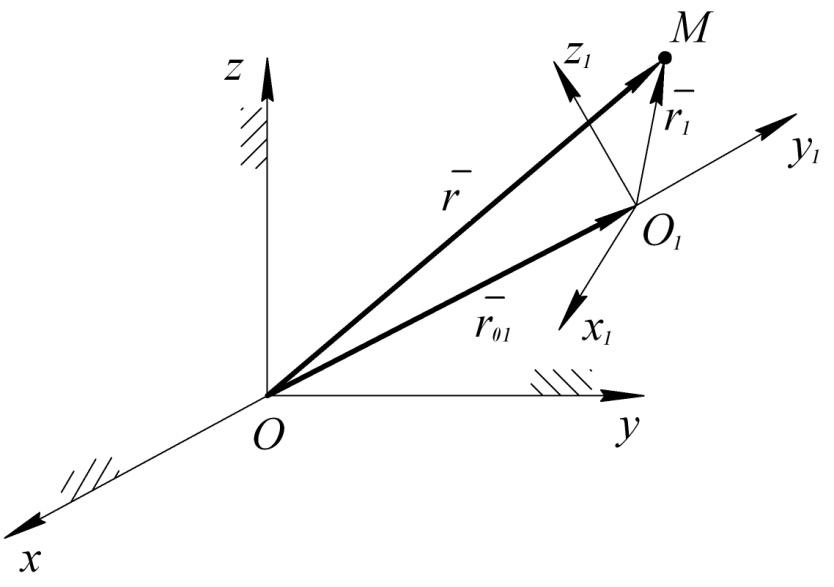 вижение
тоски М относительно неподвижной системы
координат (О, х1,
у1,
z1)
называется абсолютным. Скорость и
ускорение в этом движении называются
абсолютной скоростью и абсолютным
ускорением, обозначаются
вижение
тоски М относительно неподвижной системы
координат (О, х1,
у1,
z1)
называется абсолютным. Скорость и
ускорение в этом движении называются
абсолютной скоростью и абсолютным
ускорением, обозначаются
![]() .
.
Движение точки М относительно подвижной
Рис. 2.13 системы координат (О, х, у,
z),
называется относительным. Скорость и
ускорение в этом движении называются
относительной скоростью и относительным
ускорением, обозначаются
![]() .
.
Подвижная система координат и все, что с ней неразрывно связано, называется переносной средой.
Движение точки
М вместе с подвижной системой координат
относительно неподвижной называется
переносным движением. Скорость (ускорение)
той точки переносной среды, с которой
в данный момент времени совпадает наша
точка, называются переносной скоростью
(ускорением), обозначаются
![]() .
.
Примером может служить движение человека по эскалатору. Движение эскалатора есть переносное движение, движение человека вниз или вверх по эскалатору есть относительное, а движение по отношению к неподвижным стенам – абсолютное.
Движение точки М по отношению к неподвижной системе отсчета, которое названо абсолютным, является сложным, состоящим из относительного и переносного движения точки. Основная задача изучения сложного движения состоит в установлении зависимостей между скоростями и ускорениями относительного, переносного и абсолютного движения точки.