

23. Синхронные триггеры
Синхронные триггеры – триггеры, у которых переход в новое состояние вызывается не только изменениями информационных сигналов, но и синхросигнала (синхронизирующего, тактирующего). Синхросигнал (тактовый сигнал) дважды в течение такта меняет свое значение. Примеры синхроимпульсов (CLK1, CLK2) приведены на рис. 3.16.

Рисунок 3.16 – Примеры синхроимпульсов
Синхронизирующий сигнал CLK имеет уровни 1, 0, передний фронт (или в некоторых источниках фронт) – переход из 0 в 1 и задний фронт (спад) – переход из 1 в 0 (рис. 3.17). Иногда условно передний фронт обозначают буквой E, а задний фронт – буквой H.

Рисунок 3.17 – Условные обозначения фронтов синхроимпульсов
Существует синхронизация по уровню (статическое управление) и по фронту (динамическое управление). В случае статического управления восприимчивость tв триггера к входным сигналам ограничивается временем, когда CLK=1 (по уровню 1) или CLK=0 (по уровню 0). Чаще всего это полтакта, а в общем случае это время, в течение которого синхросигнал принимает значение 1 (по уровню 1) или 0 (по уровню 0). Это часто накладывает временные ограничения на схему, где эти триггеры используются.
Чтобы уменьшить время, в течение которого триггер был бы чувствителен к изменению состояния, используют динамическую синхронизацию. В данном случае триггер чувствителен к изменению состояния в течение короткого промежутка времени – в окрестностях фронта (спада) (см. рис. 3.18). Это дает преимущество перед другими триггерами, поскольку таким триггером легче управлять. Вероятность неожиданных переключений такого триггера сводится к нулю.
Если триггер асинхронный, он чувствителен к изменению состояния в течении всего времени функционирования. Статически управляемые триггеры называют latch, динамически управляемые триггеры называют flip-flop.
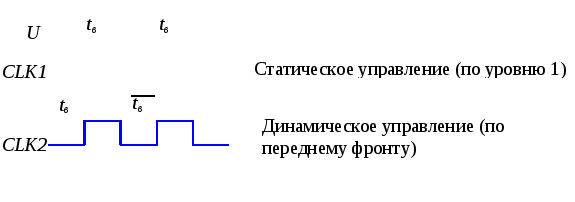
Рисунок 3.18 – Статическая и динамическая синхронизации
Условные обозначения триггеров с различными типами синхронизации приведены на рис. 3.19 на примере RS-триггера.

Рисунок 3.19 – Условные обозначения RS-триггеров
Сокращенная таблица переходов синхронного RS-триггера по уровню 1 приведена в табл. 3.27.
Таблица 3.27 – Сокращенная таблица переходов синхронного RS-триггера по уровню 1
|
С |
R |
S |
Q t+1 |
|
0 |
0 |
0 |
Q t |
|
0 |
0 |
1 |
Q t |
|
0 |
1 |
0 |
Q t |
|
0 |
1 |
1 |
Q t |
|
1 |
0 |
0 |
Q t |
|
1 |
0 |
1 |
1 |
|
1 |
1 |
0 |
0 |
|
1 |
1 |
1 |
х |
Сокращенная таблица переходов синхронного RS-триггера по переднему фронту приведена в табл. 3.28.
Таблица 3.28 – Сокращенная таблица переходов синхронного RS-триггера по переднему фронту
|
С |
R |
S |
Q t+1 |
|
Е |
0 |
0 |
Q t |
|
Е |
0 |
1 |
1 |
|
Е |
1 |
0 |
0 |
|
Е |
1 |
1 |
х |
|
0 |
х |
х |
Q t |
|
1 |
х |
х |
Q t |
|
H |
х |
х |
Q t |
Для понимания разницы в работе между выше приведенными триггерами (рис. 3.19), необходимо разобраться во временных диаграммах, приведенных на рис. 3.20.

Рисунок 3.20 – Временные диаграммы работы RS-триггеров
Преимущество, которое дает динамическая синхронизация достигается усложнением внутренней структуры триггера. На рис. 3.21 и 3.22 для сравнения приведены структуры двух триггеров типа R*S* - синхронизируемого уровнем 1 и передним фронтом. Структура асинхронного R*S*-триггера приведена на рис. 3.3.

Рисунок 3.21 – Структура и условное обозначение R*S*-триггера, синхронизируемого уровнем 1
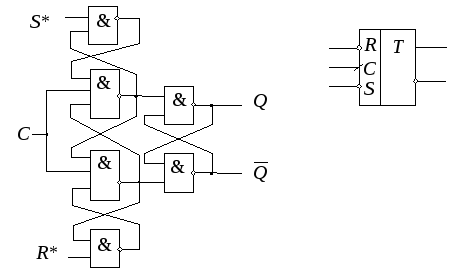
Рисунок 3.22 – Структура и условное обозначение R*S*-триггера, синхронизируемого передним фронтом
Также на рис. 3.23 и 3.24 для сравнения приведены структуры двух триггеров типа D (VD) - синхронизируемого уровнем 1 и передним фронтом.

Рисунок 3.23 – Структура и условное обозначение D (VD) -триггера, синхронизируемого уровнем 1

Рисунок 3.24 – Структура и условное обозначение D -триггера, синхронизируемого передним фронтом c асинхронной установкой
Асинхронная установка D-триггера (рис.3.24) осуществляется подачей комбинации R* = 0 и S* = 1 для сброса триггера в 0 и R* = 1 и S* = 0 для сброса триггера в 1. В случае подачи комбинации R* = 1 и S* = 1 триггер выполняет функции D-триггера, комбинацию R* = 0 и S* = 0 подавать нельзя.
Вообще существует большое количество D-триггеров.