

4.Графики движения выходной координаты и ее производной во времени и фазовых траекторий по каждой схеме.
5.Вывод уравнений фазовых траекторий.
6.Выводы по влиянию вида релейного элемента на вид переходного процесса.
5.4.Контрольные вопросы
1.Общие свойства фазовых траекторий.
2.Типы особых точек фазовых траекторий системы второго порядка.
3.Методы построения фазовых траекторий.
4.Аналитическое описание релейных элементов.
5.Связь фазовых траекторий и изменения фазовых координат во време-
ни.
ЛАБОРАТОРНАЯ РАБОТА № 6: ИССЛЕДОВАНИЕ СИСТЕМЫ С ПЕРЕМЕННОЙ СТРУКТУРОЙ
Цель работы: исследование скользящих режимов в системах с переменной структурой методом фазовой плоскости.
6.1. Общие сведения
Применение систем с переменной структурой позволяет получить высокое быстродействие, т. е. протекание процессов за минимальное время при незначительных колебаниях, а в отдельных случаях и при отсутствии коле-
баний выходных координат в уста- |
|
|
k1 |
|
|
|
|
|
|
новившихся режимах. В работе рас- |
|
|
|
ОУ |
сматривается два варианта движений |
|
|
|
|
|
|
k2 |
|
|
|
|
|
||
в системе с переменной структурой, |
|
|
УП |
|
которые в общем случае могут быть |
|
|
|
|
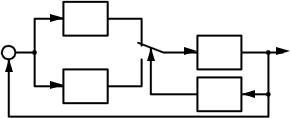
представлены на рис. 6.1, где введе- |
Рис. 6.1. Система с переменной структурой |
|||
ны следующие обозначения: ОУ – объект управления; УП – устройство переключения; k1 и k2 – коэффициенты регулятора.
Допустим, объект управления – это система второго порядка, не обла-
дающая при постоянной структуре собственной устойчивостью |
|
x kx 0 . |
(6.1) |
19 |
|
Фазовые траектории системы (6.1) будут представлять собой концентрические эллипсы. С помощью регулятора k1 обеспечим системе движение, при котором фазовая траектория будет представлять собой эллипс, вытянутый вдоль оси y x . С регулятором k2 система тоже неустойчива, а ее фазовой траекторией будет эллипс, вытянутый вдоль оси x.
Если управляющее устройство обеспечит переключения по следующему алгоритму: при попадании изображающей точки на ось x включается регулятор k2 , а на ось x – регулятор k1 , то система будет асимптотически устойчи-
вой. Математическая форма записи описанного алгоритма примет вид: |
|
|
x k1kx 0, xx |
0, |
(6.2) |
|
|
|
x k2kx 0, xx |
0. |
|
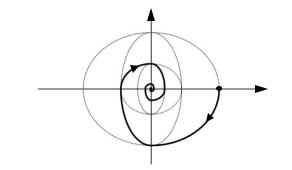
Таким образом, первый регулятор будет действовать в первом и третьем квадрантах фазовой плоскости, а второй – во втором и четвертом. Движение изображающей точки на фазовой плоскости будет происходить так, как показано на рис. 6.2. Из приведенного рисунка следует, что система становится асимптотически устойчивой, но устойчивого положения равновесия она достигает только при t .
Однако наибольшее распространение получили системы с другим видом движения, который получил
название скользящего режима. Такой режим позволяет привести изображающую точку в начало координат за минимальное число переключений, т. е. устранить колебательные процессы. При этом изменяется не структура си-
стемы, а закон переключения. Два регулятора по-прежнему являются неустойчивыми. Один регулятор должен обеспечить движение изображающей точки по фазовой траектории типа «седло», а второй – по фазовой траектории типа «центр». Например, организуем переключения в системе (6.1) таким образом, что
x k1kx 0, x x x 0, |
(6.3) |
|||
x k kx 0, x x |
x 0. |
|||
|
||||
|
1 |
|
|
|
20
В этом случае линиями раздела между областями действия регуляторов будут ось ординат и наклонная прямая на фазовой плоскости, определяемая выражением x x и называемая линией скольжения. Движение изображающей точки в зависимости от значения будет происходить, как показано на рис. 6.2.
y |
y |
x |
x |
– x
– x
а |
б |
Рис. 6.2. Фазовые траектории системы с переменной структурой: а –со скользящим режимом; б – без скользящего режима
Как видно из приведенных фазовых траекторий (см. рис. 6.2), движение изображающей точки в идеальном случае происходит с одним переключением, после чего наблюдается скольжение вдоль прямой линии x к началу координат. Во втором случае скольжения не наблюдается. Это вызвано тем, что угол наклона линии переключения больше угла наклона сепаратрисы седловой траектории, т. е. 
 k .
k .
6.2. Порядок выполнения работы
1.Создать новую модель в Matlab Simulink: New Simulink Model
2.Во вкладке Configuration Parameters/Solver задать следующие настройки расчета переходных процессов: type – fixed step; step size – 1e–4.
3.Собрать модель системы с переменной структурой с объектом управления (6.1) и двумя регуляторами, обеспечивающими движение изображающей точки по эллипсу в соответствии с алгоритмом (6.2). Коэффициент k объекта управления (6.1) выбрать согласно таблице вариантов. Коэффициенты k1 и k2 подобрать самостоятельно с целью получения асимптотической
устойчивости, причем необходимо выполнить неравенство k2>k1>0.
4. Исследовать движение фазовых координат во времени посредством моделирования процессов в системе при отклонении системы от состояния
21

равновесия. Для этого в окне Function Block Parametrs интеграторов задать различные начальные значения (Initial condition).
5. Построить фазовые траектории и переходные процессы в системе.
6. Собрать модель системы с переменной структурой с объектом управления (6.1) и двумя регуляторами, обеспечивающими движение изображающей точки по отрезкам эллипсов и седловидных кривых в соответствии с алгоритмом (6.3). Коэффициент k объекта управления (6.1) выбрать согласно таблице вариантов. Задать начальные условия в интеграторах. Коэффициент k1 подобрать самостоятельно с целью получения асимптотической устойчивости.
7. Исследовать движение фазовых координат во времени посредством моделирования процессов в системе при отклонении системы от состояния равновесия для двух вариантов алгоритма (6.3). Первый вариант – система со скользящим режимом, т. е. 0 
 k . Второй вариант – система без скользящего режима, т. е.
k . Второй вариант – система без скользящего режима, т. е. 
 k .
k .
8.Построить фазовые траектории и переходные процессы в системе.
9.Сделать выводы об изменениях фазовых траекторий рассмотренных систем.
|
|
|
|
|
|
|
|
|
|
Таблица |
|
|
|
|
|
|
|
|
|
|
|
|
|
Вариант |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
|
10 |
k |
1,5 |
2,5 |
3,5 |
4,5 |
1 |
1 |
2 |
3 |
4 |
|
5 |
6.3. Содержание отчета
1.Титульный лист.
2.Цель работы.
3.Математическое описание объекта и закона управления Расчетные схемы согласно варианту, выполненные в Matlab Simulink.
4.Графики переходных процессов и фазовых траекторий.
5.Выводы по исследованию различных систем с переменной структу-
рой.
6.4.Контрольные вопросы
1.Что такое система с переменной структурой? Принципы формирования систем с переменной структурой?
2.Дайте определение устойчивости системы. Укажите основные типы устойчивости.
22