Основные понятия теории механизмов и машин: механизм, машина, машинный агрегат. Классификация механизмов и машин.
Механизм - система твердых тел, предназначенная для передачи и преобразования заданного движения одного или нескольких тел в требуемые движения других твердых тел.
Машина - техническое устройство, выполняющее преобразование энергии, материалов и информации с целью облегчения физического и умственного труда человека, повышения его качества и производительности.
Машинный агрегат - техническая система, состоящая из одной или нескольких соединенных последовательно или параллельно машин и предназначенная для выполнения каких-либо требуемых функций. Основные виды механизмов:
Рычажные, зубчатые, кулачковые, мальтийские,планетарные,манипуляторы
Существуют следующие виды машин:
1. Энергетические машины - преобразующие энергию одного вида в энергию другого вида. Эти машины бывают двух разновидностей:
Двигатели, которые преобразуют любой вид энергии в механическую Генераторы, которые преобразуют механическую энергию в энергию другого вида.
2. Рабочие машины – машины, использующие механическую энергию для совершения работы по перемещению и преобразованию материалов. Эти машины тоже имеют две разновидности:
Транспортные машины, которые используют механическую энергию для изменения положения объекта (его координат).
Технологические машины, использующие механическую энергию для преобразования формы, свойств, размеров и состояния объекта.
3. Информационные машины предназначены для обработки и преобразования информации. Они подразделяются на: Математические машины, преобразующие входную информацию в математическую модель исследуемого объекта.
Контрольно-управляющие машины, преобразующие входную информацию (программу) в сигналы управления рабочей или энергетической машиной.
4. Кибернетические машины- машины обладающие элементами искусственного интеллекта).
Структура механизмов - виды простейших типовых механизмов и их элементы, кинематические пары и их классификация.
Структура механизма- совокупность его элементов и отношений между ними.
Основные виды механизмов.
рычажные
зубчатые
кулачковые
мальтийские
планетарные
манипуляторы
Звено - твердое тело или система жестко связанных тел, входящих в состав механизма.
Кинематическая цепь - система звеньев, образующих между собой кинематические пары.
Кинематическая пара - подвижное соединение двух звеньев, допускающее их определенное относительное движение.
Кинематические пары (КП) классифицируются по следующим признакам:
по виду места контакта (места связи) поверхностей звеньев:
низшие, в которых контакт звеньев осуществляется по плоскости или поверхности (пары скольжения );
высшие, в которых контакт звеньев осуществляется по линиям или точкам (пары, допускающие скольжение с перекатыванием).
по относительному движению звеньев, образующих пару:
вращательные;
поступательные;
винтовые;
плоские;
сферические.
по способу замыкания (обеспечения контакта звеньев пары):
силовое (за счет действия сил веса или силы упругости пружины);
геометрическое (за счет конструкции рабочих поверхностей пары).
по числу условий связи, накладываемых на относительное движение звеньев (число условий связи определяет класс кинематической пары);
по числу подвижностей(Н) в относительном движении звеньев.
3 Билет Метод векторных уравнений и их графическое решение в форме планов положений, скоростей и ускорений.
Теорема о сложении движения:При кинематическом исследовании методом планов скоростей и ускорений различают абсолютное и относительное движение звеньев и кинематических пар механизма и основываются на теореме о сложении движения, согласно которой «движение любой точки звена рассматривается как сложное, состоящее из двух движений: а) переносного вместе с одной из точек звена, выбранной за полюс в относительном движении и б) относительного вокруг выбранного полюса» . Абсолютное движение – это движение точки или тела относительно неподвижной системы координат, связанной с неподвижной стойкой.Относительное движение – это движение точки или звена относительно подвижной системы координат, которая связана с каким-либо движущимся звеном. Движение подвижной системы координат называется переносным движением.планом положения механизма называется чертеж, изображающий расположение его звеньев в какой-либо определенный момент движения. Отсюда следует, что план положения представляет собой кинематическую схему механизма, вычерченную для заданного положения кривошипа в определенном масштабе.
Планы положений механизмов, включающих в себя двухповодковые группы, строятся методом засечек.
4 Билет Балансировка роторов - понятие о неуравновешенности ротора, виды неуравновешенности роторов и способы их устранения.
Ротором называют звенья механизмов, совершающие вращательное движение и удерживаемые при этом своими несущими поверхностями в опорах
различают следующие виды неуравновешенности роторов:
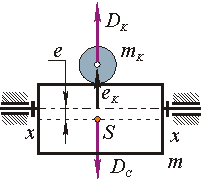
- статическую, когда
эти оси параллельны; При статической
неуравновешенности главная центральная
ось инерции параллельна оси вращения
ротора, т.е. центр масс ротора не находится
на оси вращения. Тогда главный вектор
дисбалансов больше нуля, а главный
момент дисбалансов равен нулю
![]() ,
а
,
а![]()
- моментную, когда
оси пересекаются в центре масс ротора S;
При моментной неуравновешенности
главная центральная ось инерции
пересекает ось вращения в центре масс
ротора, т.е. главный вектор дисбалансов равен
нулю, а главный момент дисбалансов не
равен нулю. Следовательно, необходимо
уравновесить только момент дисбалансов.
![]() ,
а
,
а![]()
- динамическую, когда оси либо пересекаются вне центра масс, либо не пересекаются, а перекрещиваются в пространстве. При динамической неуравновешенности главная центральная ось инерции пересекает ось вращения не в центре масс ротора, либо перекрещивается с ней; и главный вектор дисбалансов, и главный момент дисбалансов не равны нулю, т.е. необходимо уравновесить и вектор, и момент дисбалансов.
5 Билет Статическая и динамическая уравновешенности механической системы
1. Статическое уравновешивание при проектировании.
При проектировании статически уравновешивают детали, имеющие небольшие осевые размеры и конструктивно неуравновешенные. Такая балансировка может быть применена для роторов имеющих малые размеры по оси вращения – маховики, зубчатые колеса, шкивы и пр.
|
|
|
|