

7. Выбор регулятора
7.1 Основы выбора закона регулирования
Для выбора регулятора необходимо знать:
параметры объекта Коб , Т и τ, определяемые по кривой разгона: Коб =37 °С/°С, Т =9 мин = 540 с и τ = 2,2 мин = 132 с ;
максимальное допустимое динамическое отклонение Х1=1,5(единиц регулируемой величины);
допустимое или желаемое перерегулирование (выбрать один из типовых переходных процессов);
допустимое остаточное отклонение ρ= ± 0,5 (единиц регулируемой величины);
допустимое время регулирования tр=450 с ;
максимально возможные значения возмущения μ(Ув)=100 % хода РО.
Допустимые значения параметров определяются технологическим процессом.
Тип регулятора (непрерывный, релейный, импульсный) можно ориентировочно выбрать по величине отношения τ/Т:
τ/Т Регулятор;
<0,2 Релейный;
< 1,0 Непрерывный;
>1,0 Импульсный или непрерывный.
τ/Т = 0,244 => Регулятор непрерывный
Для регуляторов непрерывного действия необходимо выбрать закон регулирования, используя следующую методику. Рассчитывают динамический коэффициент регулирования
Rд=Х1/(Коб μ%)=1,5/(37∙100)=0,00045045
для астатических объектов
Rд=Х1Т/τ μ%
7.2 Динамический расчет сар
Расчет САР с серийными регуляторами заключается в определении настроек регуляторов, обеспечивающих заданное качество переходных процессов.
ПИД-регулятор Wпид(р)=Кр(1+1/(Тiр)+Тdр) коэффициентпередачи регулятора Кр, % хода РО/ед. регулируемой величины; время изодрома Ти с; время предварения Тпр , с.
Апериодический Кр=0,95/(Коб*τ/Т)=0,95/0,31*(3,2/6)=5,74
Ти = 2∙τ = 4,4 мин =264 с
Тп = 0,4∙τ = 0,88мин = 52,8 с

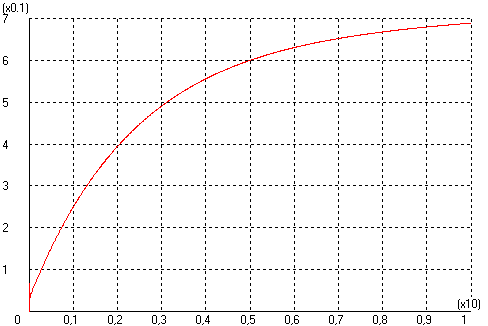
При повышении коф. усиления до 50 мы получим.
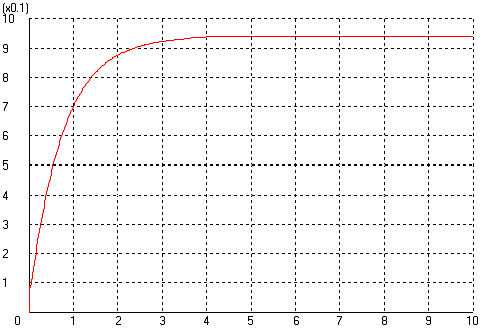
Так мы можем повышать коэффициент усиления примерно до 900 увеличивая, уменьшая тем самым время перерегулирования. Но после 900 система становится неустойчивой.

Функциональная схема автоматизации.
При проектировании систем автоматизации технологических процессов в лесной и деревообрабатывающей промышленности все технические решения по автоматизации станков, агрегатов или отдельных участков технологического процесса отображается на схемах автоматизации.
Схемы автоматизации являются основным техническим документом, который определяет структуру и функциональные связи между технологическим процессом, приборами, средствами контроля и управления и отражает характер автоматизации технологических процессов.
При разработке схем автоматизации технологических процессов необходимо решить следующие основные задачи:
сбор и первичная обработка информации;
представление информации диспетчеру;
контроль отклонений технологических параметров;
автоматическое и дистанционное управление;
Принципиальная электрическая схема.
Принципиальные электрические схемы определяют полный состав приборов, аппаратов и устройств (а также связей между ними), действие которых обеспечивает решение задач управления, регулирования, защиты, измерения и сигнализации.
Принципиальные схемы служат основанием для разработки других документов проекта.
При разработке систем автоматизации технологических процессов принципиальные электрические схемы обычно выполняют применительно к отдельным самостоятельным элементам, установкам или участкам автоматизируемой системы. Схема должна обеспечивать высокую надёжность, простоту и экономичность, чёткость действий при аварийных режимах, удобство оперативной работы, эксплуатации, чёткость оформления.
При всём многообразии принципиальных электрических схем в различных системах автоматизации любая схема, независимо от степени сложности, представляет собой определённым образом составленное сочетание отдельных, достаточно элементарных цепей и типовых функциональных узлов, в заданной последовательности выполняющих ряд стандартных операций: передачу командных сигналов от органов управления или измерения к исполнительным органам, усиление или размножение командных сигналов, их сравнение, превращение кратковременных сигналов в длительные и, наоборот, блокировку сигналов и т.п. К элементарным цепям могут быть отнесены типовые схемы включение измерительных приборов различного назначения.
.