

3.5. Составление гидравлических схем автоматического управления
Проектирование гидравлических систем управления станками и механизмами осуществляется с учетом циклов движения рабочих органов, которые характеризуют порядок чередования состояния покоя и движения, замедленного и ускоренного движения и т. д. Далее рассматривается ряд задач, в которых характерные виды движения поршня гидроцилиндра имеют следующие обозначения: ИП – исходное положение гидравлического исполнительного механизма; БВ – быстро вперед, БН – быстро назад; в этом случае не предъявляют высоких требований к стабильности скорости исполнительного механизма. Скорость поршня определяется производительностью насоса или задается дросселем (рис. 3.3, е); РП – рабочая подача; скорость подачи поршня задается дросселем с регулятором (рис. 3.3, ж, или 3.3, з); Рв – реверс, изменение направления движения поршня; «Стоп» – остановка поршня с разгрузкой насоса (рис. 3.3, б). Если V1 = V2, то для обеспечения равенства скоростей поршня используются распределители с дифференциальным подключением (рис. 3.3, г).
При составлении гидравлической схемы для заданного цикла необходимо в первую очередь показать: бак, насос, предохранительный клапан с манометром и фильтр (насосная станция). Далее на схеме нужно показать поршень, а также в соответствии с заданием распределитель или группу распределителей. Затем с учетом характера видов движения подключить гидравлические аппараты, реализующие отдельные типовые схемы. Проверить работу гидравлических схем и после коррекции составить описание ее работы.
Например, составить гидравлическую схему для цикла: ИП – РП – Рв – БН – «Стоп». В схеме используются распределители с электрическим управлением.
Гидравлическая схема для данного цикла показана на рис. 3.8. Рабочая жидкость от насоса Н, давление в котором задается предохранительным клапаном КП и контролируется по манометру Мн, поступает в нагнетательную магистраль. В нагнетательной магистрали установлен фильтр Ф.

Рис. 3.8. Гидравлическая схема для цикла: ИП – РП – Рв – БН – «Стоп»
При движении поршня вправо (РП) скорость его задается дросселем с регулятором ДР2, параллельно которому установлен обратный клапан КО2. Скорость поршня влево (БН) задается дросселем ДР1 с установленным параллельно дросселю обратным клапаном КО1. В крайнем левом положении поршня («Стоп») разгрузка системы осуществляется через распределитель согласно схеме (см. рис. 3.2, л).
3.6. Пневматические, гидравлические исполнительные механизмы с линейным перемещением регулирующего органа
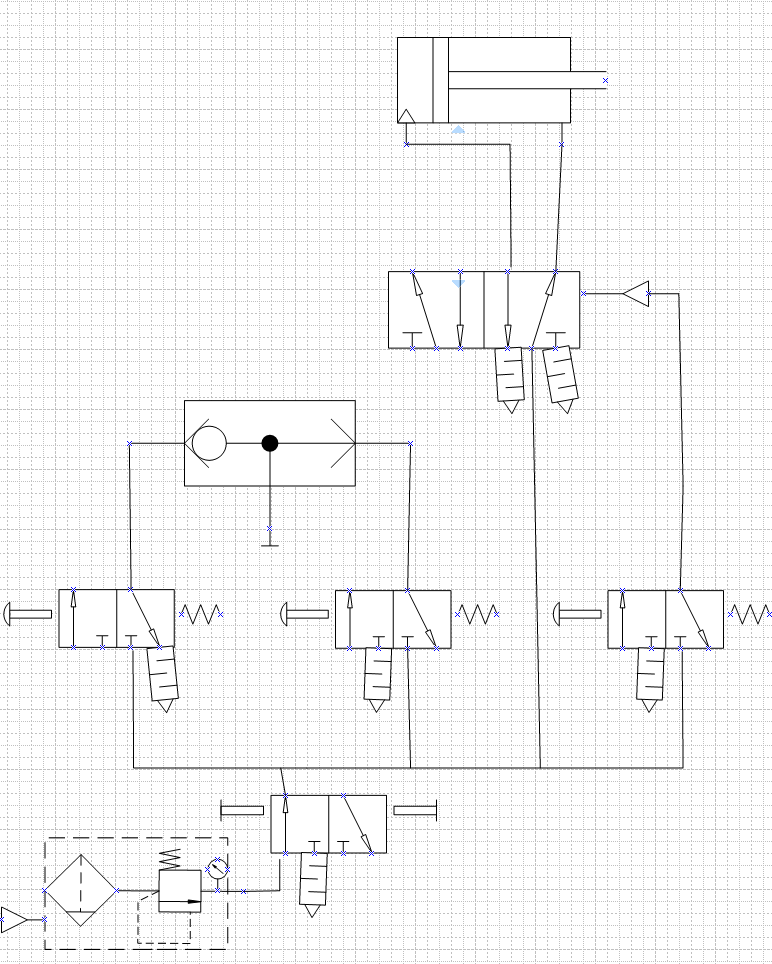
Рис.3.6 Пневматическая схема с линейным перемищением регулирующего органа
Максимальное усилие F, развиваемое исполнительным механизмом, без учета сил трения поршня 8 по цилиндру 1
F = SP, (3.1)
где S – эффективная площадь поршня; P – давление рабочей среды в магистрали 5.
При прямом (толкающем) ходе поршня
![]() .
(3.2)
.
(3.2)
При обратном (тянущем) ходе поршня
![]() ,
(3.3)
,
(3.3)
где D – диаметр поршня; d – диаметр штока 8.
Для идеального гидроцилиндра скорость поршня
![]() ,
(3.4)
,
(3.4)
где Kц = 1/S; Qц – количество рабочей среды (масла), поступающей в гидроцилиндр в единицу времени.
Определим характер динамики исполнительного механизма. С учетом утечек формула (3.4) примет вид
![]() ,
(3.5)
,
(3.5)
где
![]() –
эластичность
механической характеристики;
–
эластичность
механической характеристики;
![]() ,
(3.6)
,
(3.6)
где Kс – суммарный коэффициент гидравлических потерь; C – коэффициент средних гидравлических потерь (C = 1,25…1,65).
Наряду с золотниковым управлением пневматический исполнительный механизм цилиндр – поршень может иметь усилитель типа сопло–заслонка или струйная трубка.