Вариант 14 теплофикационная установка леспромхоза
Состоит из одного теплообменника горячего водоснабжения и двух отопительных бойлеров (рис.2.14). Бойлер представляет собой поверхностный теплообменник, в котором за счет теплоты пара (проходящего в межтрубном пространстве) подогревается сетевая вода (проходящая внутри трубок).
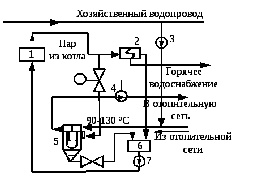
Рис. 2.14. схема теплофикационной установки: 1 - паровой котел: 2 - бойлер
горячего водоснабжения; 3 - подпиточный насос; 4 - сетевой насос;
5 - теплофикационный бойлер; б - бак конденсата; 7 - конденсатный насос
Для расчета САР регулируемым параметром служит температура прямой воды после бойлера U0=90...130 °С (в зависимости от температуры наружного воздуха). Регулирующее воздействие производится изменением количества греющего пара, поступающего в бойлер. Объект описывается уравнением (1.6, а решение его 1,8).
Максимально допустимое динамическое отклонение в переходном процессе Х1 = 3 °С. Допустимая остаточная неравномерность Хост = ±1.5 °С.
Статические и динамические характеристики камеры приведены в таблице.
|
№ |
Объект автом-и |
Канал регулир-ия |
τо, мин |
T1, мин |
T2, мин |
Kоб |
|
14 |
Теплофикацион- ная установка
|
Температура воды после бойлера ─ расход пара |
0,2 |
0,34 |
1,16 |
0,62 °С/кг/ч |
Решение
П :
 =
= =
2.8 ;
=
2.8 ;
ПИ :
 =
= =
2.8 сек;
=
2.8 сек;
 =0.6*69.6=41.76
сек;
=0.6*69.6=41.76
сек;
ПИД :
 ;
;
 ;
;
 ;
;
Рассмотрим анализ на примере CAP температурой сушильной камеры.
Создадим передаточную функцию объекта управления.
>> n1=[0.62];
>> m1=[69.6 1];
>> W=tf(n1,m1)
Transfer function:
0.62
----------
69.6 s + 1
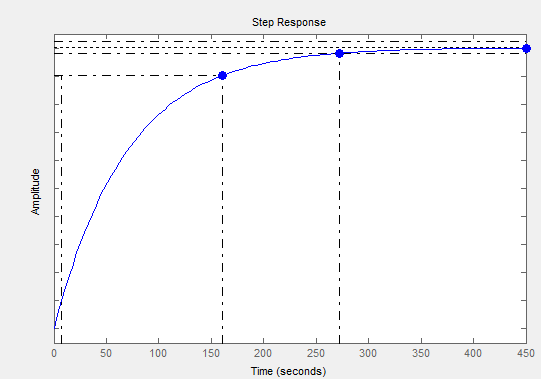
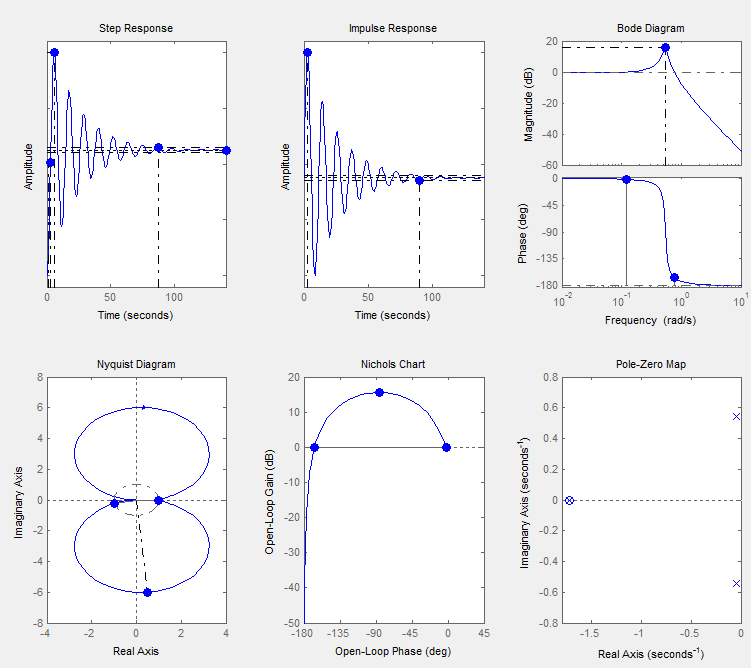
Рис.3 Переходная

Рис.3.1 Импульсная

Рис.3.2 Bode
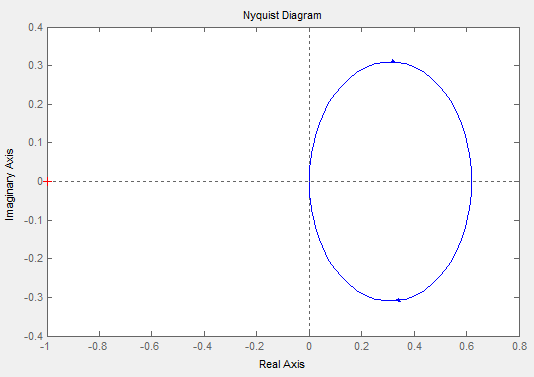
Рис.3.3 Niquist

Рис.3.4 Nichol

Рис. 3.5 Pole-Zero
Передаточная функция П-регулятора:
>> n2=[2.8];
>> m2=[1];
>> Kr=tf(n2,m2)
Transfer function:
2.8
>> G=W*Kr
Transfer function:
1.736
----------
69.6 s + 1

Выполнение функции в формате ltiview (sys) вызывает запуск обозревателя, отображающего заданные аргументом характеристики модели с именем ltiview (G) рис. 1 и открытие в окне обозревателя графика переходной характеристики модели (рис. 1).
Переходная характеристика позволяет определить время регулирования системы с П-регулятором и другие характеристики
Для
того чтобы сделать более компактное
представление о функциях, в окне LTI
Viewer,
можно воспользоваться выводом в
диалоговое окно до 6 обозревателей, для
этого нужно активизация пункта меню
Tools
Viewer
Configuration,
что приведет появлению диалогового
окна позволяющего выбрать набор
интересующих нас характеристик для
отображения. В результате окно
интерактивного обозревателя примет
вид показанный в расчете с П-регулятором

Создадим передаточную функцию системы с ПИ-регулятором
>> n3=[1];
>> m3=[44,76]
>> Ti=(n3,m3)
>> Ti=tf(n3,m3)
Transfer function:
1
---------
44 s + 76
>> Gpi=Kr+Ti
Transfer function:
123.2 s + 213.8
---------------
44 s + 76
>> Wpi=Gpi*W
Transfer function:
76.38 s + 132.6
--------------------------------
3036 s^3 + 5508 s^2 + 500 s + 76
>> ltiview(Wpi)
Переходная характеристика с ПИ-регулятором

Создадим передаточную функцию системы с ПИД-регулятором
>> n4=[29];
>> m4=[1];
>> Td=tf(n4,m4)
Transfer function:
29
>> Wr = Kr + Ti + Td
Transfer function:
1399 s + 2418
-------------
44 s + 76
Передаточная функция разомкнутой САР равна произведению Wr*Wou
>> WRR = Wr*W
Transfer function:
867.5 s + 1499
--------------------------------
3036 s^3 + 5508 s^2 + 500 s + 76
Найдем переходный процесс для разомкнутой САР . Переходный процесс имеет не правильную форму и большое время регулирования
>> ltiview (WRR)

Замкнем систему отрицательной обратной связью с помощью функции feedback (sys) и определим характеристики замкнутой САР Wzam.
>> Wzam = feedback(WRR,[1])
Transfer function:
867.5 s + 1499
-----------------------------------
3036 s^3 + 5508 s^2 + 1368 s + 1575
>> ltiview (Wzam)